


- 收藏
- 加入书签
麦克纳姆轮底盘运动控制的学习记录
 打开文本图片集
打开文本图片集
摘要
为了巡检车能在狭窄空间移动和改变物块的方位,实现物料的配送和安全监视播报,设计搭建了以麦克纳姆轮(Mecanum Wheel)作为驱动的巡线车,配有摄像头视觉传感器和语音播报功能,通过PID算法调速控制麦克纳姆轮的转速,实现底盘控制,以下是我在安装调试巡检车过程中的心得体会和部分看法。
关键词:巡线车;麦克纳姆轮;底盘控制;算法;视觉传感器
前言
传统轮式小车在狭小空间转向存在弊端,而麦克纳姆轮可以全方向移动,非常灵活,也因此麦克纳姆轮在大学生机器人竞赛和特殊工种机器人中被广泛使用,麦克纳姆轮小车不需要传统转向系统,安装、调试较简单,较适合机器人底盘控制算法的入门,此巡检车是工程训练中心为了提高工训一楼科技含量,方便小型的物料运输,监视学生工作情况保证学生安全而计划开发的。麦克纳姆轮和驱动电机已经确定,下一步是调试底盘,未来会进一步在此基础上添加更多的功能。
1.麦克达姆轮小车的3D建模
1.1确定轴距:
根据麦轮小车的运行环境、质心距离地面的高度和3~20kg的载重,麦轮与地面接触的点应近似为边长为490mm的正方形的4个顶点。
1.2巡检车建模
1.2.1以铝型材为框架,完成下层底盘的建模:
1.2.2以铝型材搭建框架,完成上层建筑的建模:
1.2.3电机座的建模:
1.3进行简单受力分析并优化建模方案:
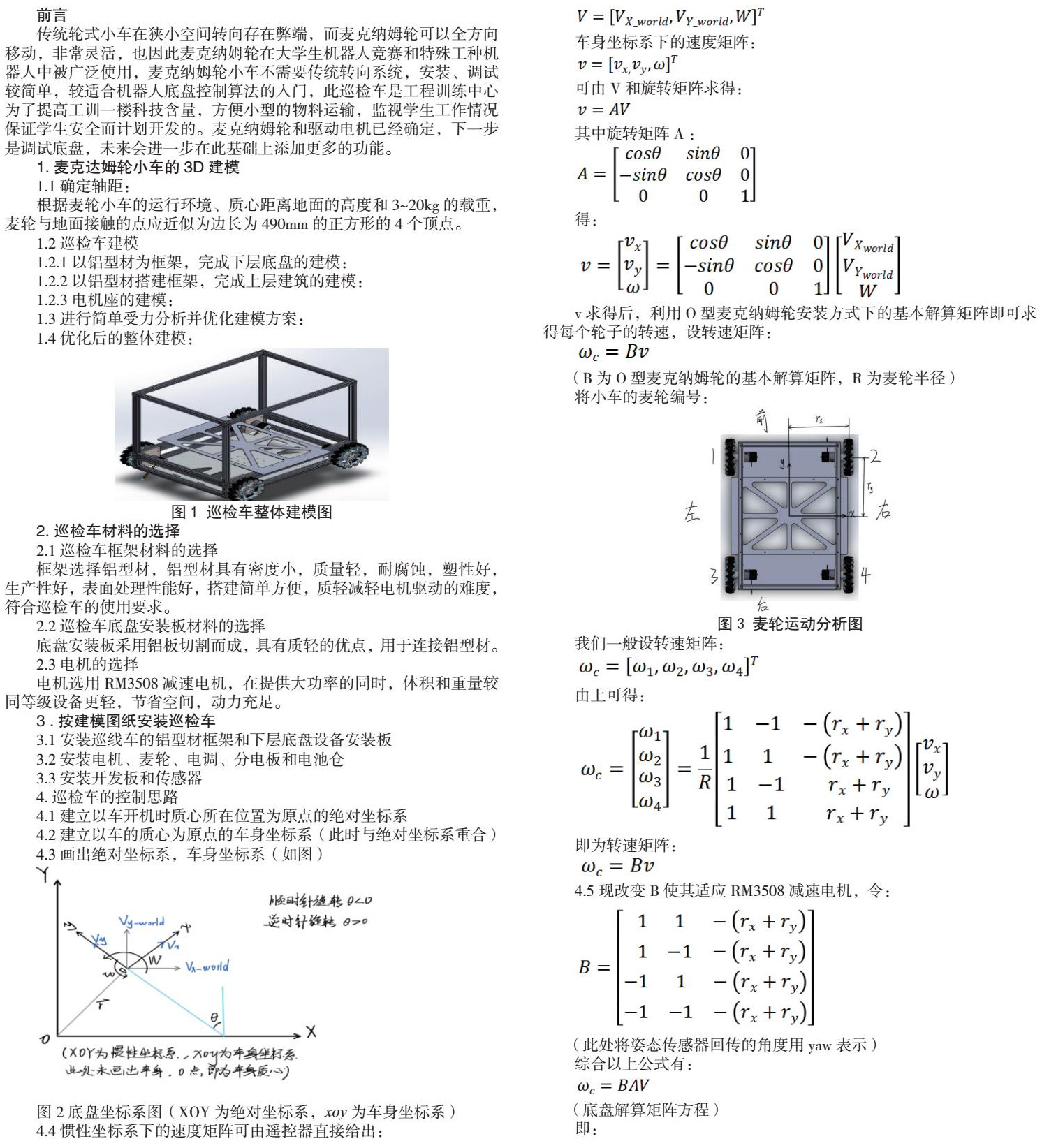
1.4 优化后的整体建模:
2. 巡检车材料的选择
2.1巡检车框架材料的选择
框架选择铝型材,铝型材具有密度小,质量轻,耐腐蚀,塑性好,生产性好,表面处理性能好,搭建简单方便,质轻减轻电机驱动的难度,符合巡检车的使用要求。
2.2巡检车底盘安装板材料的选择
底盘安装板采用铝板切割而成,具有质轻的优点,用于连接铝型材。
2.3电机的选择
电机选用RM3508减速电机,在提供大功率的同时,体积和重量较同等级设备更轻,节省空间,动力充足。
3 .按建模图纸安装巡检车
3.1安装巡线车的铝型材框架和下层底盘设备安装板
3.2 安装电机、麦轮、电调、分电板和电池仓
3.3 安装开发板和传感器
4. 巡检车的控制思路
4.1建立以车开机时质心所在位置为原点的绝对坐标系
4.2建立以车的质心为原点的车身坐标系(此时与绝对坐标系重合)
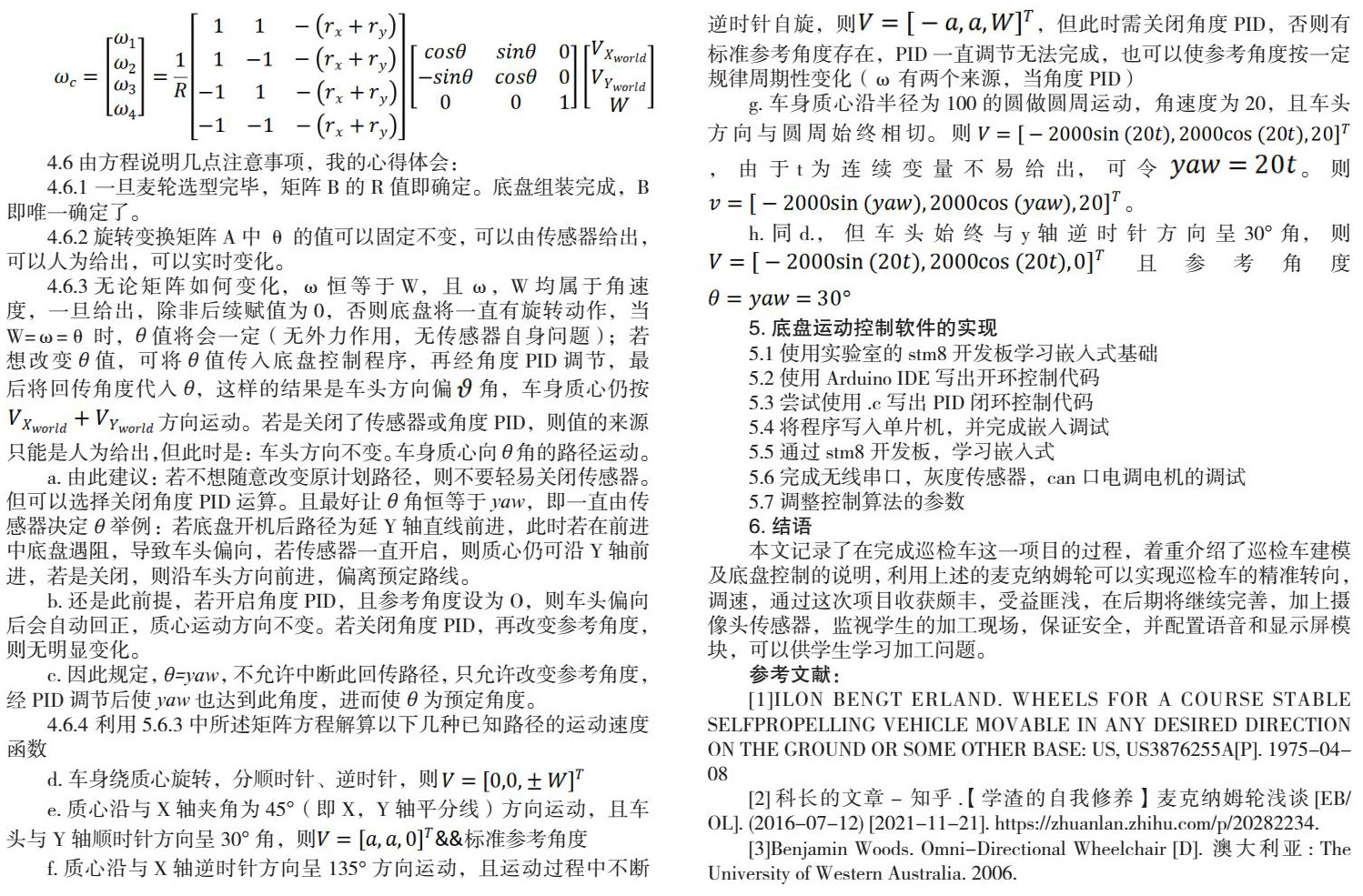
4.3画出绝对坐标系,车身坐标系(如图)
4.6由方程说明几点注意事项,我的心得体会:
4.6.1 一旦麦轮选型完毕,矩阵B的R值即确定。底盘组装完成,B即唯一确定了。
4.6.2旋转变换矩阵A中的值可以固定不变,可以由传感器给出,可以人为给出,可以实时变化。
4.6.3无论矩阵如何变化,恒等于,且,均属于角速度,一旦给出,除非后续赋值为0,否则底盘将一直有旋转动作,当时,值将会一定(无外力作用,无传感器自身问题);若想改变值,可将值传入底盘控制程序,再经角度PID调节,最后将回传角度代入,这样的结果是车头方向偏角,车身质心仍按方向运动。若是关闭了传感器或角度PID,则值的来源只能是人为给出,但此时是:车头方向不变。车身质心向角的路径运动。
a.由此建议:若不想随意改变原计划路径,则不要轻易关闭传感器。但可以选择关闭角度PID运算。且最好让角恒等于,即一直由传感器决定举例:若底盘开机后路径为延Y轴直线前进,此时若在前进中底盘遇阻,导致车头偏向,若传感器一直开启,则质心仍可沿Y轴前进,若是关闭,则沿车头方向前进,偏离预定路线。
b.还是此前提,若开启角度PID,且参考角度设为O,则车头偏向后会自动回正,质心运动方向不变。若关闭角度PID,再改变参考角度,则无明显变化。
c.因此规定,,不允许中断此回传路径,只允许改变参考角度,经PID调节后使也达到此角度,进而使为预定角度。
4.6.4 利用5.6.3中所述矩阵方程解算以下几种已知路径的运动速度函数
d.车身绕质心旋转,分顺时针、逆时针,则
e.质心沿与X轴夹角为(即X,Y轴平分线)方向运动,且车头与Y轴顺时针方向呈角,则&&标准参考角度
f.质心沿与X轴逆时针方向呈方向运动,且运动过程中不断逆时针自旋,则,但此时需关闭角度PID,否则有标准参考角度存在,PID一直调节无法完成,也可以使参考角度按一定规律周期性变化(有两个来源,当角度PID)
g.车身质心沿半径为100的圆做圆周运动,角速度为20,且车头方向与圆周始终相切。则,由于t为连续变量不易给出,可令。则。
h.同d.,但车头始终与y轴逆时针方向呈角,则且参考角度
5.底盘运动控制软件的实现
5.1使用实验室的stm8开发板学习嵌入式基础
5.2使用Arduino IDE写出开环控制代码
5.3尝试使用.c写出PID闭环控制代码
5.4将程序写入单片机,并完成嵌入调试
5.5通过stm8开发板,学习嵌入式
5.6 完成无线串口,灰度传感器,can口电调电机的调试
5.7调整控制算法的参数
6.结语
本文记录了在完成巡检车这一项目的过程,着重介绍了巡检车建模及底盘控制的说明,利用上述的麦克纳姆轮可以实现巡检车的精准转向,调速,通过这次项目收获颇丰,受益匪浅,在后期将继续完善,加上摄像头传感器,监视学生的加工现场,保证安全,并配置语音和显示屏模块,可以供学生学习加工问题。
参考文献
[1]ILON BENGT ERLAND. WHEELS FOR A COURSE STABLE SELFPROPELLING VEHICLE MOVABLE IN ANY DESIRED DIRECTION ON THE GROUND OR SOME OTHER BASE: US, US3876255A[P]. 1975-04-08
[2]科长的文章 - 知乎. 【学渣的自我修养】麦克纳姆轮浅谈[EB/OL]. (2016-07-12) [2021-11-21]. https://zhuanlan.zhihu.com/p/20282234.
[3]Benjamin Woods. Omni-Directional Wheelchair [D]. 澳大利亚: The University of Western Australia. 2006.

 京公网安备 11011302003690号
京公网安备 11011302003690号

