


- 收藏
- 加入书签
钻杆计数系统研究与应用
 打开文本图片集
打开文本图片集
 < a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/b38a/b38a202201/b38a202201227-3-l.jpg">
< a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/b38a/b38a202201/b38a202201227-3-l.jpg">
摘要:本文提出了一种基于yolov5算法的人工智能钻杆计数方法,研发了钻杆计数系统。首先,通过矿用监控摄像头获取井下打钻视频数据,采用图像增强技术增加图像关键点信息;其次,在yolov5算法的基础上训练出识别钻机动力头的模型,结合注意力机制网络,有效识别打钻的动作;最后,设计出钻杆计数算法,从而实现井下钻杆的计数。实验结果表明:在自建的数据集上,动力头识别模型的识别准确率为98.2%,误计数结果低,能够满足实际需求;同时于彬长矿业小庄矿煤矿进行应用,取得了良好的效果。本文建立的系统提高了煤矿井下打钻过程的安全管理水平,防止谎报距离、钻杆打钻数量等问题,提升了煤矿的自动化程度。
关键词:煤矿;智能抽采;矿用软件;钻杆计数;yolov5
中图分类号:TD-05 文献标志码:A
0 引言
深层煤炭开采过程中存在高瓦斯压力不可控因素,极易诱发煤与瓦斯突出事故,从而对煤矿安全生产造成威胁[1]。为了降低瓦斯浓度,减少甚至消除煤与瓦斯突出灾害,一般采用钻孔抽采和排放煤层内的瓦斯[2]。传统钻杆计数方法主要有人员查验法、行程开关法、电驻波法等[3],这些方法存在劳动重复、计数误差较大、设备易损坏等问题。计算机视觉方法是指利用视觉图像算法自动分析打钻视频中钻杆数量的方法,该方法因人为干预少、效率高等受到众多研究者的关注。然而,现有的计算机视觉方法也存在一些局限性和挑战,如井下环境复杂多变、光照不均匀、干扰物遮挡、图像质量低等。董立红等[4]提出了一种基于改进Camshift算法的钻杆计数方法,通过Camshift算法跟踪钻机标志物,并根据标志物运动轨迹上的波峰数量判断出钻杆数量,但是标志物容易被粉尘污染及被旁物遮挡,进而导致目标丢失甚至跟踪失败。高瑞等[5]提出了一种基于改进ResNet网络的井下钻杆计数方法,通过ResNet识别图像上的卸杆与非卸杆动作,并对识别结果进行积分滤波得到置信度曲线,根据下降沿的个数判断出钻杆数量,但是ResNet未考虑动作的时序信息,在相似背景的图像上容易发生误识别。党伟超等[6]提出了一种利用三维卷积神经网络(3D Convolutional Neural Network,3DCNN)识别钻机卸杆动作的方法,虽然3DCNN解决了一些时序问题,但同时也学习了大量的图像冗余信息,导致该方法的场景适应性不强。
本文提出了一种基于yolov5网络的人工智能方法,可以快速地在图像中定位和识别多个目标。利用yolov5网络训练出识别钻机动力头,并结合注意力机制网络,有效地识别打钻动作。本文主要工作和创新点有:(1)采用yolov5网络作为目标检测算法,利用其单阶段、复合缩放、空间金字塔池化等特点,实现了对井下钻机动力头的快速、准确、轻量级识别;(2)设计了一种基于标志位的钻杆计数算法,通过设置阈值坐标和标志位,根据动力头位置变化实时统计钻杆数量。在陕西彬长矿业小庄煤矿进行了现场试验和调试,验证了本文方法和系统有效性和可行性,并展示了本文方法和系统泛化能力。
1 系统概述
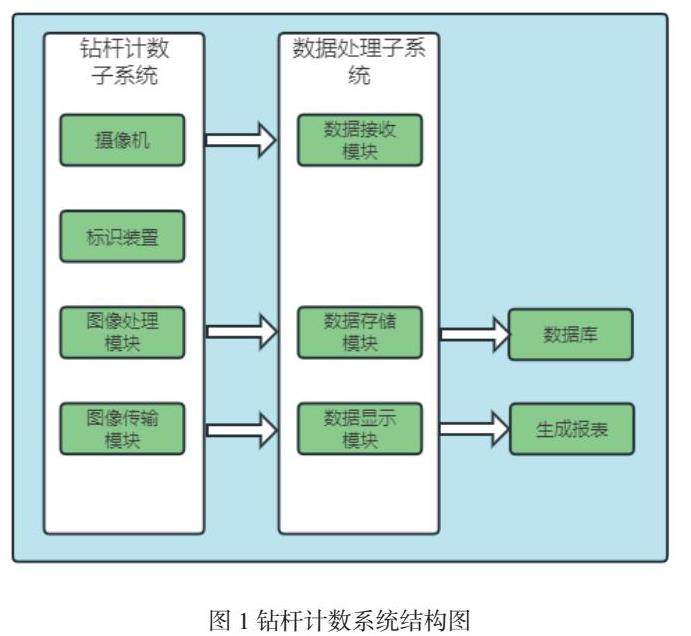
系统由钻杆计数子系统和数据处理子系统组成。钻杆计数子系统包括摄像仪、标识装置、图像处理模块、数据传输模块等。数据处理子系统包括数据接收模块、数据存储模块、数据显示模块等,系统结构图如图1所示:
钻杆计数子系统的主要功能是通过摄像仪采集井下打钻的视频数据,并通过标识装置对钻机动力头进行标记,以便于图像处理模块对其进行识别和跟踪。图像处理模块采用基于yolov5算法的人工智能钻杆计数方法,对视频数据进行分析,提取动力头的位置和状态信息,并根据钻杆计数算法实时统计钻杆数量和钻孔深度。数据传输模块负责将钻杆计数结果通过无线网络发送到地面控制中心。数据处理子系统的主要功能是接收并存储钻杆计数子系统传输过来的数据,并通过数据显示模块将数据以图表或报表的形式展示给煤矿管理人员,方便查询和分析。数据显示模块还可以根据用户的需求,对数据进行筛选、排序、统计等操作,提供更多的信息和服务。
2 关键技术
2.1 系统流程
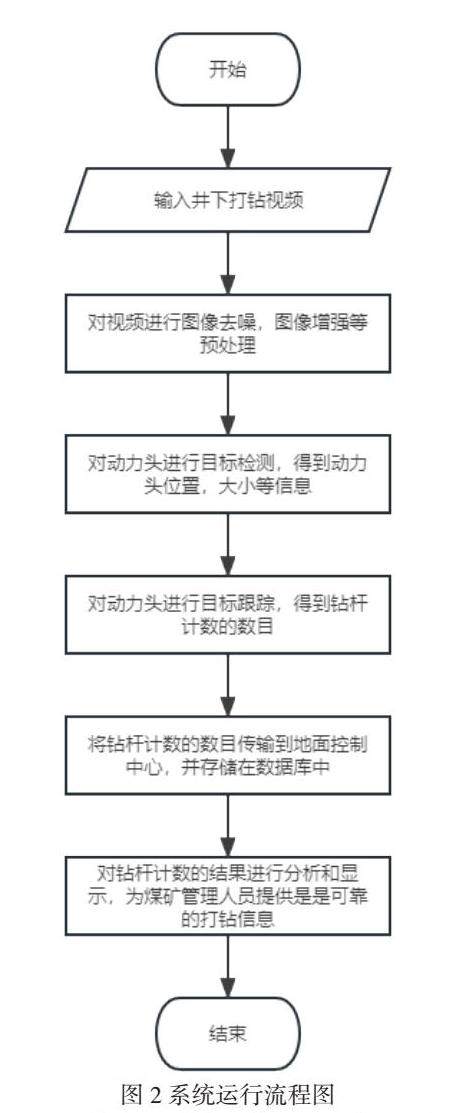
系统运行流程图如图2所示:
系统运行流程图说明了系统的工作原理和步骤,主要包括以下几个部分:
图像采集:使用摄像仪获取井下打钻视频数据,并将其传输给图像处理模块;
图像增强:对视频数据进行去噪、增亮、锐化等处理,提高图像质量和清晰度;
动力头识别:利用yolov5算法训练出识别钻机动力头的模型,并在视频帧中检测出动力头的位置和类别;
钻杆计数:根据动力头的位置变化,设计出钻杆计数算法,实时统计钻杆数量和钻孔深度;
数据传输:将钻杆计数结果通过无线网络发送到地面控制中心;
数据接收:接收并存储钻杆计数子系统传输过来的数据;
数据显示:将数据以图表或报表的形式展示给煤矿管理人员,方便查询和分析。
2.2 钻杆计数方法
钻杆计数是指根据动力头的位置变化,实时统计钻机已经下入井中的钻杆数量。本设计方案采用了一种基于标志位的方法,具体步骤如下:
首先,在视频帧中检测出动力头的位置,并计算其相对于井口的坐标。
然后,设定一个阈值坐标,用来判断动力头是否达到了某一位置。这个阈值坐标可以根据钻杆的长度和井深等因素确定。
接着,设定一个标志位,用来记录动力头是否完成了一次往返的运动。初始值为true。
最后,根据以下规则进行钻杆计数:如果动力头的坐标小于阈值坐标,并且标志位为true,则表示动力头正在向下打钻,将标志位设为false,并将钻杆数量加一;如果动力头的坐标大于阈值坐标,并且标志位为false,则表示动力头正在向上卸钻,将标志位设为true,并将钻杆数量减一;如果动力头的坐标等于阈值坐标,则表示动力头处于静止状态,不进行计数;如果动力头的坐标超出阈值坐标范围,则表示发生异常情况,提示用户检查。
该方法的优点是简单易实现,不受光照和干扰物影响;为了提高计数的准确性和稳定性还设想了如下的方法。例如:在每次开始或结束钻杆时,人工确认一下当前的钻杆数量,并与系统进行对比和校准;在每次检测到动力头超过或小于阈值坐标时,记录一下当前时间,并与上一次时间进行比较。如果时间间隔异常地长或短,则提示用户检查是否有故障或其他原因导致动力头无法正常运行。
3 系统应用案例
本系统已经在陕西彬长矿业小庄煤矿进行了现场试验与调试,取得了良好的效果,目前仍然在合作开发中。系统展示如图3所示:
系统能够实时地获取井下打钻视频数据,通过图像处理模块对视频进行分析,识别出钻机动力头的位置和状态,通过钻杆计数算法统计出钻杆数量和钻孔深度,并将数据传输到地面控制中心,方便查询和管理。系统的计数精度达到了98.4%,与人工计数结果基本一致,有效地解决了人工计数的误差和不便。
系统还具有一定的泛化能力,能够适应不同型号和品牌的钻机,对于动力头的识别和跟踪仍然具有较高的准确性。系统的应用不仅提高了煤矿井下打钻过程的安全管理水平,而且节省了人力物力,提高了煤矿的自动化程度。为了测试模型的泛化能力,我们也对其他钻机进行了识别,实验发现对于动力头的识别,仍然具有良好的识别能力
4 结语
本文针对井下钻杆计数的问题,提出了一种基于yolov5网络的人工智能方法,并开发了钻杆计数系统。本文的主要工作和创新点有:采用yolov5网络作为目标检测算法,利用其单阶段、复合缩放、空间金字塔池化等特点,实现了对井下钻机动力头的快速、准确、轻量的识别;设计了一种基于标志位的钻杆计数方法,通过设置阈值坐标和标志位,根据动力头的位置变化,实时统计钻杆数量;在陕西彬长矿业小庄煤矿进行了现场试验和调试,验证了本文方法和系统的有效性和可行性,同时也对其他钻机进行了识别,展示了本文方法和系统的泛化能力。
参考文献:
[1]梁运培,郑梦浩,李全贵,等. 我国煤与瓦斯突出预测与预警研究综述[J/OL]. 煤炭学报:1-24[2022-12-08].DOI:10.13225/j.cnki.jccs.2022.0965.
[2]谢和平,周宏伟,薛东杰,等. 我国煤与瓦斯共采:理论技术与工程[J].煤炭学报,2014,39(8):1391-1397.
[3]李树刚,包若羽,张天军,等. 本煤层瓦斯抽采钻孔合理密封深度确定[J].西安科技大学学报,2019,39(2):183-188,216.
[4]董立红,王杰,厍向阳. 基于改进Camshift算法的钻杆计数方法[J]. 工矿自动化,2015,41(1):71-76.
[5]高瑞,郝乐,刘宝,等. 基于改进ResNet网络的井下钻杆计数方法[J]. 工矿自动化,2020,46(10):32-37.
[6]党伟超,姚远,白尚旺,等. 煤矿探水卸杆动作识别研究[J]. 工矿自动化,2020,46(7):107-112.
作者简介:作者简介:姓名:刘敏轩,出生年月1996.5,性别:男,民族:汉,籍贯(省市):陕西省,学历:本科学历,职称,研究方向或从事工作:通风与安全
通讯作者:刘敏轩

 京公网安备 11011302003690号
京公网安备 11011302003690号

