


- 收藏
- 加入书签
基于STM32单片机智能拐杖设计中的超声波测距与防摔装置设计
 打开文本图片集
打开文本图片集
摘要:针对智能拐杖对非接触式测距需要,设计出一套超声波测距与防摔装置来提高拐杖的安全性能。超声波测距由STM32作为主控芯片,通过发射超声波遇到障碍物形成回波,通过计算从而实现与障碍物之间的距离勘测。防摔装置通过对拐杖与地面的倾斜角进行监测,当拐杖与地面倾角小于所设定的角度时,发出报警求救信号,让使用者在需要时能得到及时的帮助。两套装置操作简单,制作成本低廉,具有较高的实用性。
关键词:非接触式;超声波;回波;勘测;防摔;倾角
一、引言
超声波测距是一种利用超声共性、电子技术、光电开关组成的非接触式距离测量方法,在各个领域都发挥着巨大的作用,在军事、工业、农业、医疗都有着优秀的表现,其应用广,发展历史长,使得超声波有着极其成熟的技术,保证了拐杖在测距时的可靠与稳定。
在搭配了测距的同时,又对拐杖增添了防摔装置,防摔装置的配备使得使用者在遇到突发情况受到伤害时能最快的得到帮助,让使用者的人生安全得到了极大的保障,因此智能拐杖用超声波测距与防摔装置设计相结合,使得视力障碍的人群以及行动不便的人群安全得到了保障。也使得智能拐杖的安全性能大大提高,这两项功能的重要性不容忽视。为此本文设计超声波测距装置与防摔装置,提高智能拐杖的安全性能。
二、超声波测距工作原理
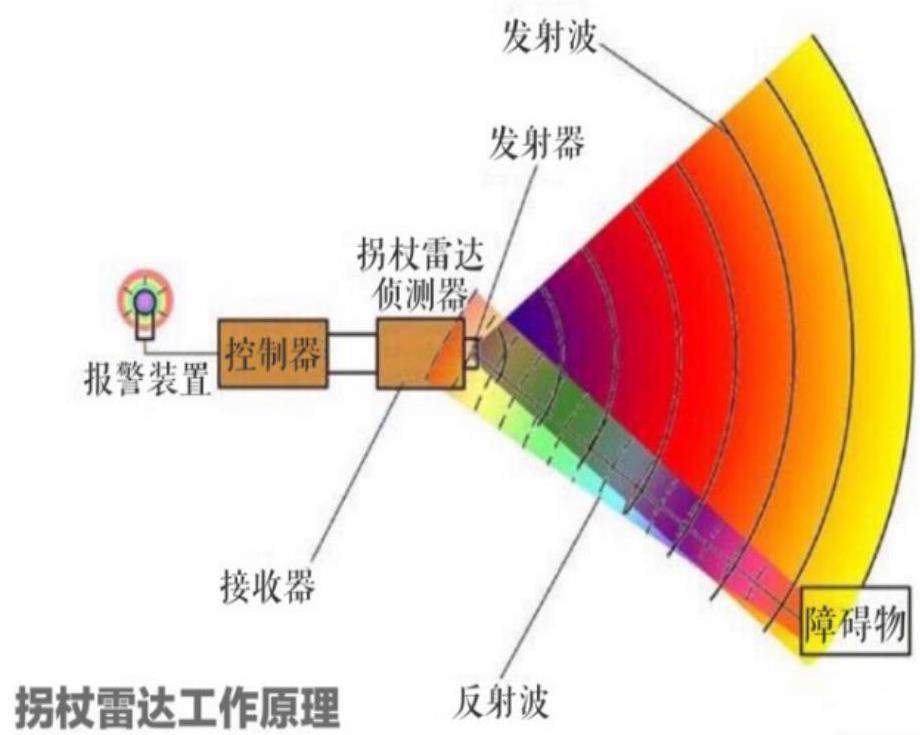
超声波避障模块的原理与雷达测物的原理极为相似,但超声波的频率相较于雷达更低,这也就使得超声波所发射的波长更长,正因如此,超声波探测方面的表现要优于雷达。超声波测距是通过发射器从某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,在传播的途中碰到障碍物时发出的超声波会立即返回,超声波接收器接收被反射回的超声波则计时停止,再通过 S=VT/2 就可计算出障碍物的距离。本设计采用 HC-SR04 超声波传感器,该模块性能稳定,测距精准,低功耗,价格低。拐杖雷达工作原理图如下图所示。
STM32主控制电路发送40kHz的脉冲信号,超声波发射器发射信号后,经超声波换能器处理后转换为超声波信号,当探测到前方的障碍物时,将超声波所测得的距离回馈到控制端,当测试距离低于设定值时,装置发出警报。提醒使用者躲避障碍物。
三、超声波测距检测流程
芯片在开始工作时先将系统初始化,启动超声波模块发射超声波,在发射超声波的同时计时器开始计时,看接收器能否接收到回波,若没有接收到回波,则继续采集数据,这时计数器将继续正常工作;若接收到回波,则计数器停止工作,并将数据传递给控制器,控制器再对数据进行计算,当计算出实际距离小于设定值,这时对使用者发出提醒。另外,由于超 声波模块测距与温度有关,为了使数据更加准确,还对其添加了温度补偿,在存储数据前对其进行温度修正。令测出的距离更加精准可靠。
四、角度测量防摔原理
角度测量防摔模块主要是应用角度传感器来测量拐杖与地面的倾斜角度。当使用者行走,可能回因为地面的问题或者不小心导致出现身体失衡,这时候地面与拐杖的倾角发生改变,当倾斜角度小于30°(角度可人为做出调整),判断为使用者摔倒。此时角度传感器将信号发送至主控芯片,再由主控芯片将信号发送到计时模块,计时器开始计时,当计时达到预先设定值之后,如果此时拐杖并未恢复,则系统判定使用者摔倒,将信号传递至通讯模块与语音模块,在接收到信号后,自动发出语音播报向周围群众求助,并通知监护人,这时可获得周围人的帮助,监护人也能第一时间收到使用者的情况,进行救援,提高拐杖对使用者的安全系数。
五、防摔检测流程
为防止使用者将跌倒时监护人未发现的情况出现,在程序中设定了相应程序, 即用户在行走时,系统初始化,对拐杖与地面的倾斜角度进行检测,角度测量器判断拐杖与地面的倾斜角度是否小于30°,若不小于则继续测量,不发生警报,若小于30°并达到设定时间未恢复至正常状态,则系统判定使用者为摔倒状态,发出语音播报向周围群众求助,并通知监护人。直到使用者恢复拐杖至正常状态并按下停止按钮,播报结束,系统重新进行倾斜角监测。
六、结语
综上所述,超声波测距与防摔装置相结合的智能拐杖,在安全性、实用性上都有着很大的提高,这些独特的功能大大保障了使用者的人身安全,为行走不便的人群出行提供了可靠的保障,并且超声波测距与防摔装置的运行方式和程序都非常简单,使得系统有极强的稳定性。在设计上所采用的材料成本低廉,覆盖面广,可替换性高,这都使智能拐杖的价格更加人性化,性价比更高,同时这也提高了智能拐杖的商业价值。
参考文献:
[1]王瑞荣.基于单片机的超声波测距仪设计[J].电子测试,2021,(05):22-23+33.
[2]王鹏,张涛,龚克,张昆.超精密超声波测距装置设计[J].信阳师范学院学报(自然科学版),2022,35(03):469-474.
[3]刘北北,杨子倩.面向视力障碍人群的智能拐杖设计研究[J].设计,2022,35(10):97-99.
[4]徐冰.基于下肢姿态传感器检测的人体防摔策略研究[D].吉林大学,2013.
项目基金:国家大学生创新项目(202211488027),国家级大学生创新项目(202111488026)。
作者简介:余兴鹏、叶晗、魏楠、陈永成、梁勇康,衢州学院2019级、2020级电气工程及其自动化专业学生。 指导教师:叶志斌。

 京公网安备 11011302003690号
京公网安备 11011302003690号

