


- 收藏
- 加入书签
水面视觉垃圾清理机器人的电路设计
 打开文本图片集
打开文本图片集
 < a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/5d33/5d33202306/5d3320230607-3-l.jpg">
< a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/5d33/5d33202306/5d3320230607-3-l.jpg">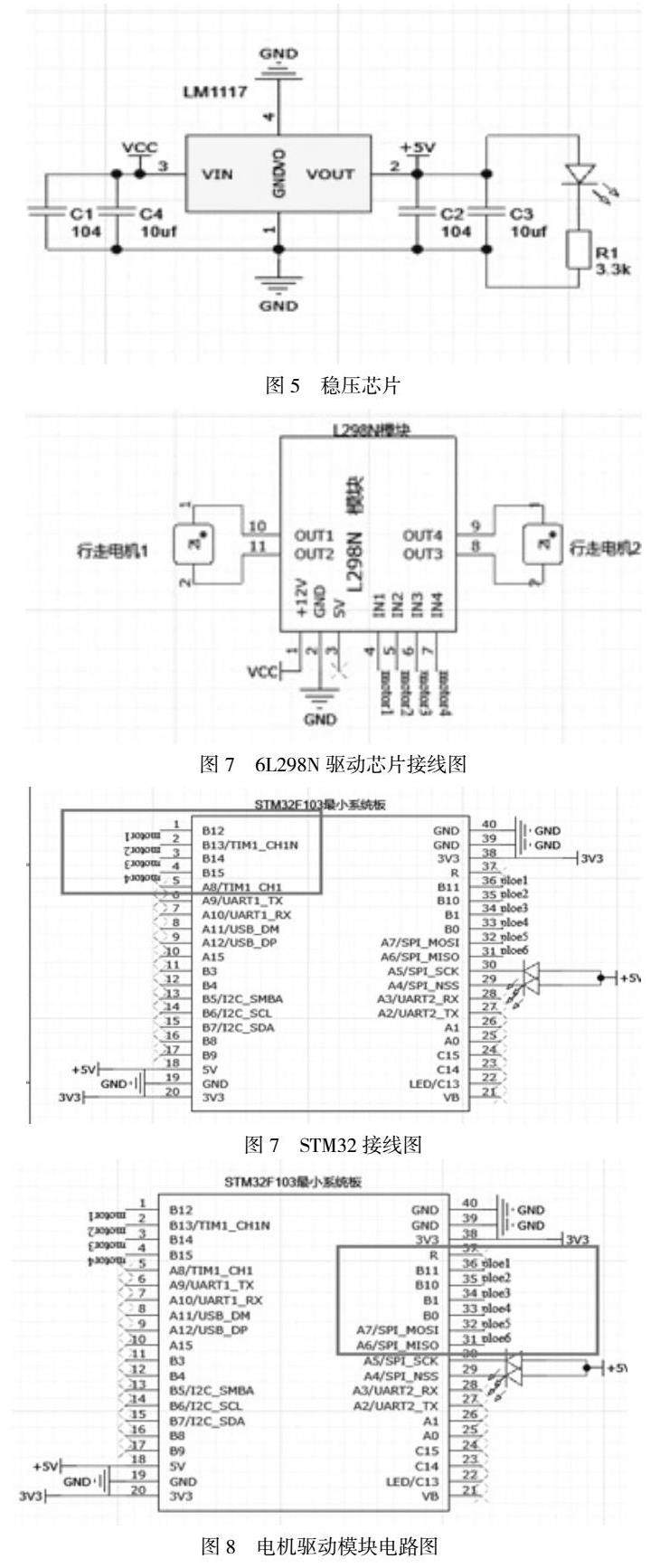
摘要:本文介绍一种基于视觉的水面垃圾清理船以及该装置的控制电路,具体阐述了该装置的设计细节与设计思路。该装置基于目标检测的人工智能视觉算法使得垃圾清理机器人能自动发现并识别垃圾,之后通过目标追踪使小船行驶到垃圾所在位置并通过传送带,垃圾清理装置对垃圾进行收集以达到清理垃圾的作用。
关键词:水面垃圾清理、控制电路、视觉算法
1.引言
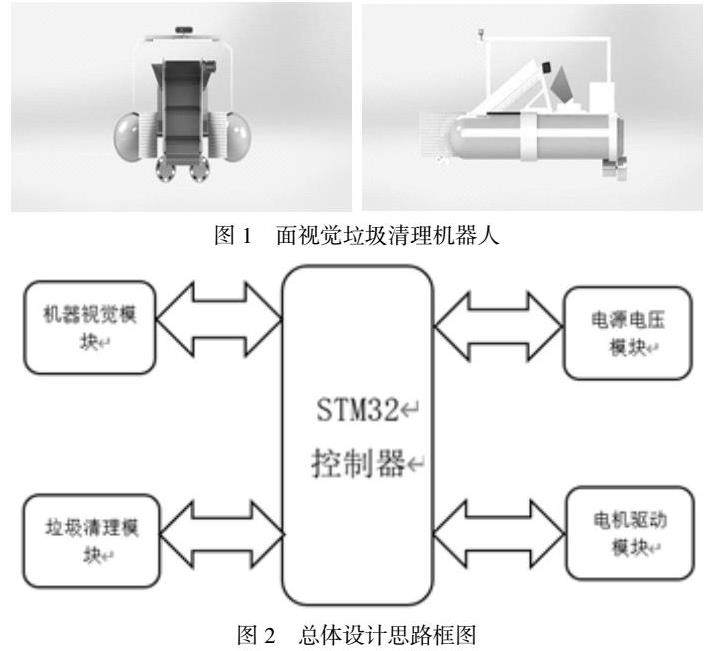
近年来国内大小湖泊、城市河道等水面的垃圾污染情况愈发严重,人类赖以生存的水资源受到的威胁越来越大。另外,公园等游乐场所的湖泊、池塘的水面上经常有塑料袋、纸屑等水面垃圾,有些还有水草、水葫芦等水生植物,影响景观,污染环境。【1】【2】笔者利用双电机推进系统设计了水面视觉垃圾清理机器人用于水面的垃圾清理,搭配树莓派和STM32主控板,设计了这款水面视觉垃圾清理机器人,如图1所示。
2.总体设计思路
将水面视觉垃圾清理机器人的核心控制器选为STM32,并且运用螺旋桨以及直流电机进行驱动,进而对水面视觉垃圾清理机器人进行控制。主要总体设计思想框图如图2所示。
在处理器作为主控芯片的基础上,在外部加载一些硬件电路模块的设计,然后对各个模块之间的连接路线进行设计,即为硬件电路设计。本设计采用的是目前市场上较为流行的STM32F103系列芯片作为本系统的中央控制器,以此完成电机控制,螺旋桨控制等任务STM32F103系列微处理器是首款基于ARMv7-M体系结构的32位标准RISV(精简指令集)处理器,提供很高的代码效率。在通常8位和16位系统的存储空间上发挥了ARM内核的高性能。该系列微处理器工作频率为72MHZ,内置高达128K字节的FLASH存储器和20K字节的SRAM,具有丰富的通用I/0端口作为最新一代的嵌入式ARM处理器,它为实现MCU的需要提供了低成本的平台、缩减的引脚数目、降低的系统功耗,同时提供了卓越的计算性能和先进的中断响应系统。丰富的片上资源使得STM32F103系列微处理器在多种领域如电机驱动、实时控制、手持设备、PC游戏外设和空调系统等都显示出了强大的发展潜力。【3】
电机的驱动芯片是采用的是微型集成电路电机驱动芯片L298N,该芯片采用标准逻辑电平控制信号,具有两个使能控制信号,能够检测外接电阻的变化,并且将变化量反馈给控制电路。电源电压模块中则选用LM1117电压转换芯片,LM1117是一款低压差集成电路?可固定输出电压也可调节输出电压输出电压范围为1.5~15V。
3.系统硬件模块选型
3.1电源电压模块
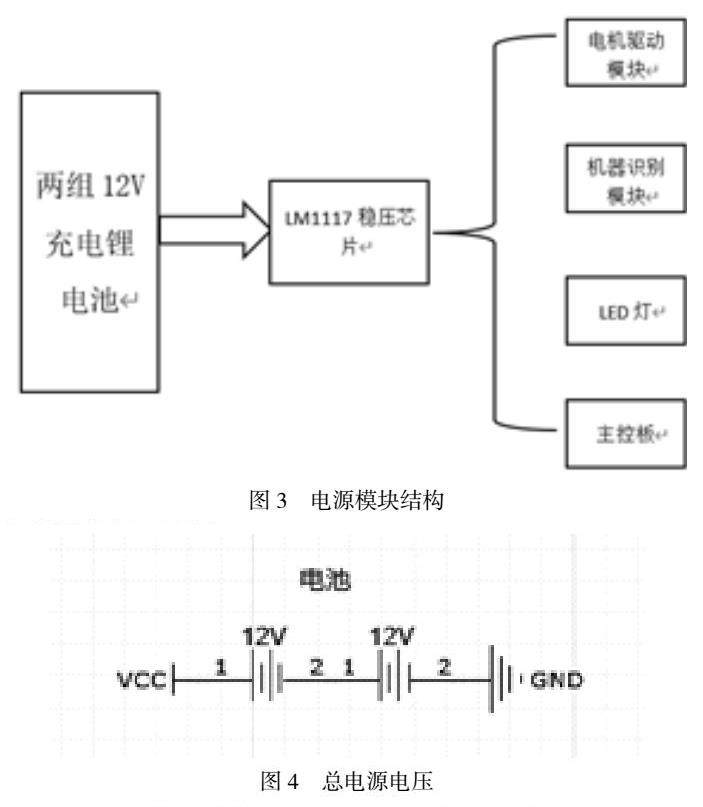
电源电压模块是给系统中硬件模块提供稳定的、有效的电压,以确保整个系统可以正常地运转。该模块对整个系统的最终性能至关重要,本课题所设计的智能小车,能耗主要为控制电路、电机驱动电路以及摄像头模块。由于系统中的各个电路模块需要的额定电压值都不相同,需要把最初电池组提供的最大电压24V通过降压电路进行电压转换,转换到各个电路模块所需要的额定电压值。电源模块结构图如图3所示。
(1)总体电源由两组12V充电锂电池提供,即提供的总电压为24V电压,电路图如图4所示。
(2)STM32外围硬件模块以及小LED灯的额定电压都是5V。锂电池组无法满足外围硬件模块以及LED灯的电压要求,若电压高于它们的额定电压,则该模块不仅不能正常工作,其电路反而还会被烧毁。所以,我们需要对锂电池组所提供的24V电压进行稳压电路处理,本文选用了LM1117型号的稳压芯片,其主要目的是提供电流限制和热保护,以确保输出电压的稳定,并且减少了电源扰动的影响,增加了系统的可靠性。其稳压电路图如下图5所示。
3.2电机驱动模块
电机驱动模块的作用是负责控制整个垃圾清理机器人系统的运动状态,电机的转动主要是通过采用电机驱动芯片来实现。L298N是SGS公司生产的直流电机驱动集成电路,比较常见的是15脚Multiwatt封装的L298N。内部包含4通道逻辑驱动电路,可以方便地驱动两个直流电机,或一个两相步进电机。工作电压为46V,输出电压最高可达50V,可以直接通过电源来调节输出电压;输出电流可达2.5A,最大可以达到4A,可驱动电感性负载;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。L298N驱动芯片的电路接线图如下图6所示。
在L298N驱动芯片的作用下,驱动模块不仅能够驱动多个步进电机同时工作,还能够驱动多个直流电机同时运动,本次设计的垃圾清理机器人中共包括两个直流电机,将两个电机相连由同一个控制信号进行控制,使得电机可以实现正转、反转以及停止四种运行模式。其于STM32上的接线图如下7图所示.
3.3垃圾清理模块
垃圾清理模块由一条传送带和垃圾储存箱组成。其中传送带的2个电机由个单独的电机驱动芯片控制,分别连接STM32的pole1到pole3,pole3到pole6管脚。
4.结语
本文主要是介绍了水面垃圾清理船硬件系统的整体设计方案,并且根据其方案进行了多层面,多方位的全面剖析,同时也根据总体方案的重点介绍了一些重要元件的选型以及工作原理,也依据整体方案中的相关要求与标准,论述了STM32芯片的一系列性能与一些外设硬件选型进行了详细的讲解。又接着对电源电压模块、垃圾清理模块、电机驱动模块、摄像头模块、LED灯光模块等内容设计进行了相关的介绍与分析。为小型水域漂浮垃圾的清理提供了可行方案,减少了人力消耗,具有一定的应用意义和推广价值。
参考文献:
[1]陈玲,高洁.一种新型水面垃圾清理分拣船的设计[J].船舶工程,2020,42(02):39-43.DOI:10.13788/j.cnki.cbgc.2020.02.07.
[2]刘伯运,赵帅,赵强强,赵培印,宋健.水面垃圾清理机器人[J].兵工自动化,2022,41(02):92-96.
[3]孙书鹰,陈志佳,寇超.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):59-63.
基金支持:武汉商学院2022年大学生创新创业训练计划,项目编号:202211654004。
作者简介:路浩原,2001.08,武汉商学院机器人工程专业学生,河南安阳人,主要兴趣和研究方向有机器人控制、机器人编程、机器人视觉。
张向阳,2002.05,武汉商学院机器人工程专业学生,湖北公安人,主要兴趣和研究方向有机器人控制、机器人编程。
李科,2002.03,武汉商学院机器人工程专业学生,湖北广水人,主要兴趣和研究方向有机械制图,机器人控制、机器人编程。

 京公网安备 11011302003690号
京公网安备 11011302003690号

