


- 收藏
- 加入书签
无人机测绘技术在校园实景三维建模中的应用研究
 打开文本图片集
打开文本图片集
 < a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/d554/d554202330/d554202330491-3-l.jpg">
< a rel="example_group" title="Custom title" href="http://img.resource.qikan.cn/qkimages/d554/d554202330/d554202330491-3-l.jpg">
摘 要 由于传统的三维模型构建方式,具有生产成本高、纹理信息不全、重建的模型无法真实反映实景信息等弊端,无法满足当前数字城市、数字校园信息化建设的迫切需要。因此,本文基于无人机测绘技术,针对校园实景三维建模的原理和流程进行研究,并结合具体实例,验证了该技术的确能够快速获取模型真实、纹理清晰的智慧校园实景三维模型。
关键词 无人机;实景三维;数字校园
中图分类号 P231.5
0 引言
随着数字校园信息化建设层次的逐步提高,实景三维数字校园的建设顺势而起。校园实景三维模型,不但能够向在校师生以及校外各方,展示自身数字校园的精神风貌,而且能够在极大程度上,方便校方管理人员对数字化校园的科学管控。可是,传统的校园三维模型,大部分都是基于影像数据为模型底图,搭载市面上常用的三维建模软件,再集成技术人员收集的平面数据和高程数据,构建校园三维模型。然而,这种重建三维校园模型的方式,需要耗费大量的人力、财力和时间,且由于纹理信息的缺失,重建的模型并不能真实反映复杂地物的形状,在实际的数字校园建设进程中,这一传统方式已经很难满足智慧校园三维模型的建设需求[1]。因此,如何快速获取模型真实、纹理清晰的智慧校园实景三维模型,是当前智慧校园三维模型建设急需解决的问题。
近年来,随着无人机和传感器技术的飞速发展,无人机测绘技术在数字城市建设领域得到了广泛的应用。韩科成等人在剖析了无人机技术原理后,深入研究了城市规划三维环境的虚拟仿真工作,仔细探讨了三维空间模型建立的流程[2];李加忠等人基于已有的三维实景,对景观设计领域的应用展开研究探索,并通过具体实验,验证了实景三维模型能够极大程度上提高景观设计的精确性这一结论[3];冼梨萍等人基于无人机倾斜摄影测量技术,实现了三维景观模型的重建,并对应用的科学可靠性进行了相关阐述[4],之后,王勇等人提出了一种基于多视图的三维重建新技术,在研究该技术时,将无人机影像数据作为研究对象,首先,优化了传统的无人机数据处理方法,优化后的方法有效提高了让科研者们经常诟病的特征点匹配精度,最后,将研究成果并用于真实的应急救灾项目中去[5]。综合来说,在倾斜摄影测量新手段的加持下,无人机测绘技术,改变了以往只能从单一角度进行拍摄的尴尬现状,目前,已经基本能够实现多台摄影相机设备,从不同的角度(主要是五个角度)进行倾斜摄影数据采集的功能。和传统三维建模的不同之处在于,无人机测绘技术所构建的实景三维模型具有其特定优势。首先,该技术克服了三维模型本身形状的局限性;其次,通过该技术生产的三维模型比较真实;再者,该技术的三维模型重建速度快;最后,实景三维模型的应用领域广。因此,本文在充分利用无人机测绘技术优势的同时,重点针对无人机测绘技术的三维重建技术流程进行研究,以更好的推广无人机测绘技术在实景三维建设中的应用。
1 校园实景三维模型重建流程
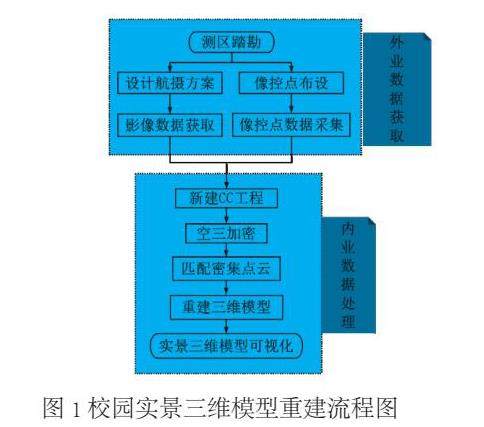
利用无人机测绘技术进行校园实景三维建模的技术核心,就是基于共线方程理论,精准恢复无人机在进行实景三维航摄数据时的坐标和姿态,继而通过影像匹配这一方法,提取大量倾斜影像两两之间的同名点,经空三加密、几何纠正等技术手段,将实景三维航摄时的原始数据,转化为大规模的实景三维点云数据集,然后,通过点云精准拼接技术,重建实景三维几何模型。最后,基于原始实景三维航摄影像,将纹理映射到实景三维模型中去,从而构建出最终的校园实景三维模型。具体流程,如图1所示。
2 实景三维重建实验及结果分析
2.1 实验概况
(1)测区概况。本实验选取了湖南水利水电职业技术学院校园为实验对象,测区占地面积约160000平方米,测区形状呈不规则状,地势起伏较大,但测区内高差并不大,高程最低点约22米,高程最高点约42米,整个测区以建筑为主,涵盖道路、植被、田径场、篮球场等多种用地类型。
(2)设备概况。
此次实验采用的设备是大疆精灵PHANTOM4。这款无人机抗磁干扰能力强大,同时具备精准定位能力,支持PPT技术后处理,航摄数据采集过程中,无人机设备能够持续记录数据,如卫星原始观测值等,大疆精灵PHANTOM4配备24mm(35mm)广角相机,同时飞机的高精度三轴机械增稳云台,能够保证航摄过程中相机的姿态稳定,减小相邻影像间的旋偏角,增大影像匹配成功率。该相机所航拍的像素尺寸为5472*3648,有效像素可达2000万像素。飞机快门也支持并适应实际作业中的高速飞行场景,及时有效地消除果冻效应,坚决避免建图精度下降。结合实际来说,一般100米航高下作业空间分辨率,可达2.5厘米。出厂逐一校准相机,标定参数写入照片,可用于后处理纠正,减少镜头畸变带来的影响。
2.2 实景三维重建流程
(1)外业数据采集。
根据研究区概况,本次实验将航摄区域分三个架次进行航飞,共布设了12条航线,航摄区域面积约165900平方米。航摄比例尺均设置为1:500,相应的地面分辨率GSD为0.05米,采用大疆精灵4作业,搭载的相机型号为FC6310R相机,相机像素大小为5472*3648像素。航摄飞行时天气为晴天,通过导入提前做好的校园任务区kml文件,确定航摄区域范围,此次实验需要的GSD为5cm/pixel,根据像元大小,相机焦距,计算得出飞行高度为138米(一般取150米进行后期计算分析),速度设置默认,拍摄模式为定时拍摄,完成动作设置为返航,照片比例4:3,关闭畸变修正,采用摄影测量3D(五向飞行)的方式采集数据,由于五向飞行会采集1条正射和4个方向倾斜的数据,每条航线飞机不调转机头,因此旁向重叠度设置为75%,航向重叠度设置为85%,斜射旁向重叠度设置为55%,斜射航向重叠度设置为65%。整个外业航摄过程耗时约56分钟,共获取791张航片。作业执行前,首先要对软硬件设备进行检查,调试,在飞行作业完毕后,即时检查获取的影像质量、数据完整性等指标。同时,利用GPS-RTK技术在测区均匀布设并采集了25个像控点数据,像控点数据的成果,坐标投影系统采用CGCS2000国家大地坐标系,坐标高程系统采用1985黄海高程,每个像控点配置了相应的像控点点之记文件说明。
(2)内业实景三维重建。
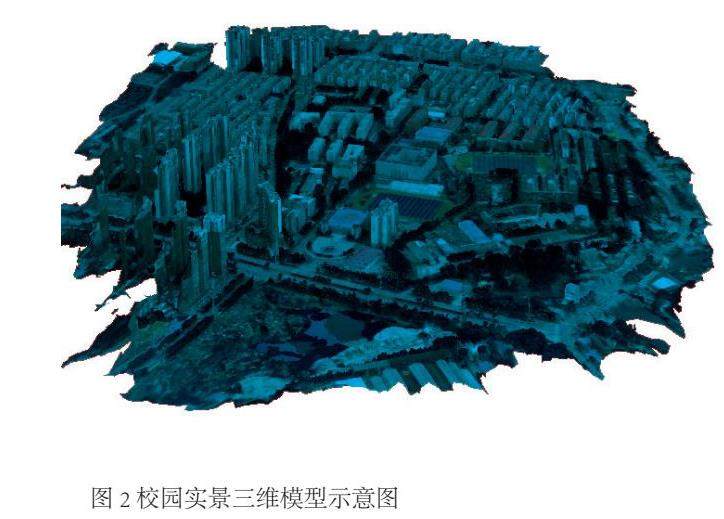
本次实验采用ContextCapture软件,完成无人机测绘技术内业实景三维重建工作。首先,在ContextCapture软件中创建工程,导入实景三维校园原始航摄影像,设置相机传感器尺寸和焦距参数和原始POS数据,检查原始影像数据文件的完整性;然后提交空三,提取同名点,优化初始POS参数和相机参数,然后刺入像控点,重新进行空三平差计算,得到优化后的高精度POS数据和相机文件参数,空三加密完成后,新建三维重建项目;在重建项目参数设置中,根据电脑配置和影像情况,
进行分块设置,输出的实景三维模型设置为osgb格式,执行重建,得到最终的校园实景三维模型。此次测区共分了4个区块,重建约耗费时间93分钟,最终的校园实景三维模型如图2所示。
2.3 模型结果分析
将基于无人机测绘技术生产的校园实景三维模型成果,通过加载xml文件,导入南方CASS的3D采集模块,依据测图规范,对校园进行数据采集,制作校园DLG线划图。为验证此次实验结果的可靠性,在校区范围内用GPS-RTK采集了8个检查点,检查点点位均匀分布在整个校园内。同时,在南方CASS的3D采集模块中,采集了相应8个检查点的坐标信息。此处,将利用GPS-RTK采集的8个检查点位称之为仪器实测值,而将通过模型采集的8个检查点位称之为模型采集值。通过计算这个8个检查点位仪器实测值和模型采集值的差值,来衡量校园实景三维模型的精度结果。具体的精度核验表如表1所示。(单位为米)
计算结果显示,在这8个检查点中,坐标X方向的误差最大值为0.006米,坐标Y方向的误差最大值为0.008米,坐标Z方向的误差最大值为0.013米,坐标X方向的中误差为0.005米,坐标Y方向的中误差为0.004米,坐标Z方向的中误差为0.009米。
3结论
本文采用了大疆无人机,结合倾斜摄影技术,来搭载重建实景三维校园模型。首先,在航摄数据的采集过程中,采用了摄影测量3D(五向飞行)的方式来采集数据,解决传统的单镜头相机实现多角度拍摄的难题,而在内业实景三维重建过程中,采用目前市面上模型重建效果最佳的ContextCapture三维建模软件,进行数字化校园的实景三维模型重建,不仅能够得到纹理清晰的实景三维模型,还能体现可视化质量的高度。同时,使用南方CASS的3D模块,加载实景三维模型,以此为据,通过裸眼采集3D矢量数据,绘制出校园的数字线划图(DLG)。最后,为验证重建的实景三维模型精度,采用GPS-RTK技术采集了8个检查点,进行核验,其中,检查点X坐标的误差最大值为0.006米,Y坐标的误差最大值为0.008米,Z坐标的误差最大值为0.013米,坐标X方向的中误差为0.005米,坐标Y方向的中误差为0.004米,坐标Z方向的中误差为0.009米。数据结果表明,检查点精度均符合规范要求,采用本文提出的校园实景三维模型重建方法,其模型重建精度能够满足数字校园建设正常生产需求。
综上所述,本文研究的三维智慧校园模型成果,相对于传统二维数字校园平面成果,其具有直观逼真,多方位记录校园,展示学校水利校园的美好形象,传播学校水利建设的优秀文化等优势。更有甚者,实景三维的可视化技术,对于招生宣传、新生入学的校园初识等问题,非常便捷高效,起到积极的引导作用。其次,本文的研究有利于职业院校无人机测绘专业有效对接三维建模实践应用。通过对校园实景三维模型的重建,将学生对无人机的理论学习和具体实践应用相结合,有利于调整无人机测绘技术专业人才培养方向,精准对接三维模型重建数据处理工程师岗位,深化产教融合。
参考文献
[1]徐思奇,黄先锋,张帆,雍小龙,夏志敏,王涛. 倾斜摄影测量技术在大比例尺地形图测绘中的应用[J]. 测绘通报,2018,(02):111-115.
[2]韩科成,耿玉秀. 无人机低空摄影在城市规划领域中的应用[J]. 江西建材,2018,(03):24-25+28.
[3]李加忠,程兴勇,郭湧,梁晨,谌丽. 三维实景模型在景观设计中的应用探索——以金塔公园为例[J]. 中国园林,2017,33(10):24-28.
[4]冼梨萍. 基于无人机倾斜摄影测量技术的三维景观模型实现[J]. 山西农经,2017,(20):145.
[5]王勇,刘辉. 基于多视图三维重建技术的无人机数据处理方法研究[J]. 中原工学院学报,2017,28(01):83-87.
基金资助:湖南水利水电职业技术学院院级课题(编号:XYYBXS202202)资助。
作者简介:尹梁波(1992-),男,硕士研究生,助教,主要从事摄影测量与遥感数据处理、三维建模、无人机测绘技术教学等方面的工作。

 京公网安备 11011302003690号
京公网安备 11011302003690号

