



- 收藏
- 加入书签

基于单片机的复杂环境陆地探测仿生六足机器人的研发
 打开文本图片集
打开文本图片集
作者简介:
张聪灵 (2003.11-),男,汉族,福建省漳州市,本科,学生,研究方向:电气工程及其自动化
丁宇良(2003.12-),男,汉族,陕西省汉中市,本科,学生,研究方向:电气工程及其自动化
洪毅(2003.3-),男,汉族,福建省厦门市,本科,研究方向:电气工程及其自动化
何英豪(2004.6-),男,汉族,福建省南平市,本科,研究方向:机械设计制造及其自动化
摘 要 针对未知陆地探索当中遇到的复杂地形和无法接收到卫星信号的通讯环境,设计的一种基于 2.4G 频段局域网控制的复杂环境陆地探测仿生六足机器人。本设计主要应用了单片机、物联网通讯、视觉图传等技术,实现系统的整体功能。该控制系统以单片机为主要控制核心,采用舵机作为六足机器人关节连接点,上位机通过 2.4G 频段局域网使用TCP通信协议对六足机器人下达命令,完成六足机器人的运动控制。采用 HTTP协议将摄像头捕捉的数据实时反馈给上位机,实现实时图传。
关键词 陆地探索;六足机器人;2.4G 频段局域网;实时图传
中图分类号:TP391.41 文献标识码:A 文章编号:1672-4801(××××) ××-××-××
复杂环境陆地探测六足机器人是基于单片机开发的设备,用于探测未知复杂地形。它涉及了单片机控制、软件开发、物联网通信和机器人运动学分析等技术。六足机器人比轮式和履带机器人更适合在不稳定或崎岖的环境中使用,具有灵活多变的运动姿态和适应不规则环境的能力。该设计适用于抢险救灾场景,有效预防救援人员发生意外事故。
1 控制系统总体设计
1.1 控制系统总体设计方案
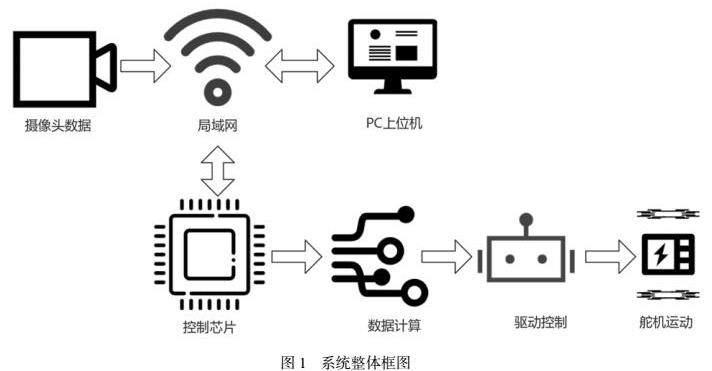
该仿生六足机器人由供电电路、主控单片机模块、摄像头采集模块、WIFI模块、运动模块(关节舵机)和显示屏模块构成。单片机作为控制核心,处理轨迹规划和运动学计算;电池和稳压模块提供供电;摄像头模块采集视野数据;WIFI模块实现实时通信,与上位机进行数据传输;运动模块包括18个关节舵机,控制各个关节的角度;显示屏模块显示上位机发送的控制命令和当前连接的WIFI网段等。系统整体结构框图如图 1 所示。
1.1 控制系统总体设计内容
为了应对复杂的陆地环境和通讯环境,本设计需要达到了以下要求:
(1)六足机器人与上位机之间的通讯能在无卫星信号的局域网下进行。
(2)六足机器人可通过按键设置所要连接的上位机的IP地址和端口,并在上位机和六足机器人成功通信后发送通信成功提示信息。
(3)通过PC上位机实现按键捕获,控制六足机器人实现前后左右平移、左右旋转、高度调节。
(4)通过上位机访问六足机器人摄像头IP地址,可调用机器人摄像头画面。
2 机器人电路设计
2.1 无线通信模块驱动电路原理
ESP-01S是一款支持标准TCP协议栈的模块,可为设备添加联网功能。它有8个引脚(GND、IO2、IO0、RXD、TXD、EN、RST和VCC),支持3.3V供电。EN引脚用于使能控制,默认高电平。烧录固件时需将IO0引脚与GND短接,用于模块复位。RXD和TXD引脚连接到UART0接口,使ESP-01S作为Wi-Fi适配器。通过单片机发送AT指令配置ESP-01S为TCP客户端透传模式,实现联网功能。原理图如图5所示:
2.2 电路焊接设计
设计通过万用板焊接完成整个系统的电路连接,使用MP1584EN稳压模块产生5V电源对STM32F103C8T6最小系统板、OLED、ESP32-CAM等电路供电,ESP-01S则通过STM32最小系统板输出的3.3V电压进行供电。
3 系统功能实现
3.1单片机程序设计
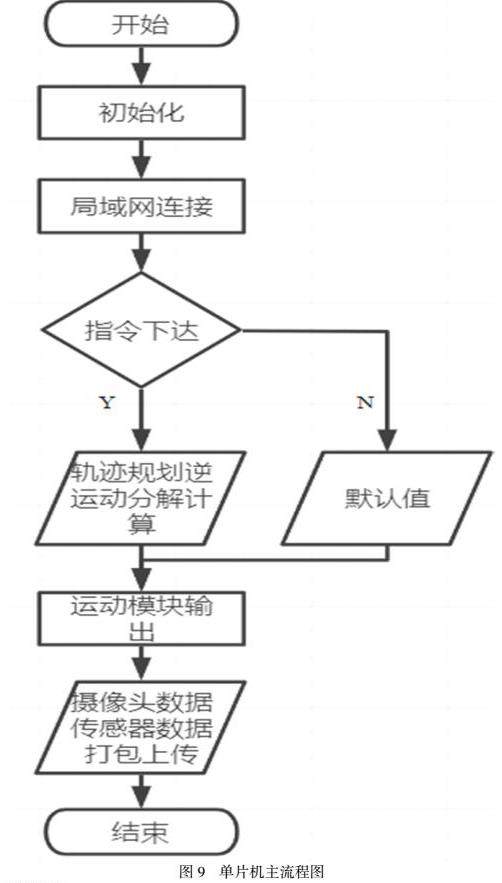
该设计使用C语言结合KEIL对单片机进行开发,主要任务包括计算运动学逆分解、轨迹规划和与上位机进行TCP通信。系统采用复合摆线进行平滑轨迹规划,使用STM32F103C8T6单片机,控制频率为40Hz,周期为25ms。每个周期根据离散化后的轨迹确定下一次足端坐标,并进行运动学逆解。解算结果通过串口发送给总线舵机,实现周期性控制。。其单片机主流程图如图9所示:
3.2 上位机软件设计
上位机软件使用QT 4.11.0开发框架,用于GUI图形界面设计。机器人与上位机通过TCP透传通信协议进行数据传输,建立TCP服务端和单片机的TCP客户端连接,通过局域网传输数据。使用C++作为开发语言。
在建立完通讯后,上位机可接收到机器人返回的通信成功信号。此时可通过触发键盘事件发送控制命令。
3.3 摄像头模块程序设计
图传采用的摄像头为ESP32-CAM,利用局域网进行HTTP协议的数据传输,HTTP协议一般用于传输视频流、图片、文件等等。当ESP32-CAM连接WIFI后,串口打印出一个新建立的局域网HTTP访问域名,通过浏览器访问该IP地址,获得摄像头数据。
4 结束语
本文利用六足机器人机械结构的优势,结合软件PC上位机的开发、局域网和下位机进行协调控制。基于局域网实现实时图传功能,通过上位机进行画面显示。最后采用ARM单片机为主要控制芯片,设计一款仿生六足机器人,能够实时进行逆运动学求解,轨迹规划、接收控制指令等功能。该设计方案精度高,易操作,成本低,有较强的实用性,为探索未知复杂环境提供了一种可靠的途径。本设计对于该类探索机器人的研究与应用具有重要的现实意义。
参考文献:
[1]基于无线控制的六足机器人的设计与实现[J]. 何苏利,李根,董立国. 智库时代. 2019(34)
[2]基于STM32的六足机器人设计与实现[J]. 王蕾,姚权允,邓博轩,董明昊. 产业与科技论坛. 2018(09)
[3]基于探索者平台的全地形机器人设计与实现[J]. 郑灵洁,胡晓军,陈静仪,朱丽,韩婧. 湖州师范学院学报. 2021(02)
[4]基于足端位置的六足机器人漫游地形感知与表征[J]. 张明路,王哲,李满宏,张建华,陈俊杰. 机械工程学报. 2021(19)
[5]基于深度学习的六足机器人梅花桩行走步态研究[J]. 余丽娟,傅汇乔,胡勇,谢晓轩. 科技视界. 2020(08)
[6]四足仿生机器人的设计[J]. 李潮,崔承勋. 南方农机. 2020(07)
[7]仿生机器人模糊自适应控制系统设计研究[J]. 李雨田. 工业加热. 2020(04)
[8]基于Matlab的六自由度工业机器人运动学逆解分析及仿真[J]. 丁志鹏,江明,游玮,梁兆东,冯海生,葛景国. 四川理工学院学报(自然科学版). 2019(01)
[9]张昊.面向嵌入式机器视觉的交互式算法开发平台研究[D].江南大学,2020.
泉州信息工程学院(国家级立项)大学生创新创业训练计划项目资助

 京公网安备 11011302003690号
京公网安备 11011302003690号


