



- 收藏
- 加入书签

基于改进粒子群算法与动态分段思想的机械臂轨迹规划方法
 打开文本图片集
打开文本图片集
摘要:针对核行业机械臂的工作效率较低和运动过程中机械冲击造成的振动和磨损问题,提出基于改进粒子群算法与动态分段思想的五次多项式轨迹规划方法。首先,根据各关节角度、角速度以及角加速度构建融合粒子群算法的动态分段目标函数,结合机械臂运动始末位姿信息,求解最优轨迹分段数,优化运动时间。实验结果表明:该方法能够根据始末位姿规划出合理的轨迹分段数,并对各段轨迹进行时间、平滑度及定位精度的优化,提高了机械臂的实际工作效率,同时降低了机械冲击对其使用寿命的影响。
关键词:机械臂;轨迹规划;动态分段;时间最优
中图分类号:U463.6 文献标识码:A DOI:
Abstract:A fifth degree polynomial trajectory planning method based on improved particle swarm optimization algorithm and dynamic segmentation idea is proposed to address the low work efficiency of nuclear industry robotic arms and the vibration and wear caused by mechanical impact during motion. Firstly, based on the angles, angular velocities, and angular accelerations of each joint, a dynamic segmented objective function integrating particle swarm optimization algorithm is constructed. Combined with the initial and final pose information of the robotic arm, the optimal number of trajectory segments is solved to optimize the motion time. The experimental results show that this method can plan a reasonable number of trajectory segments based on the starting and ending poses, optimize the time, smoothness, and positioning accuracy of each segment of the trajectory, improve the actual working efficiency of the robotic arm, and reduce the impact of mechanical impact on its service life.
Key words: Mechanical arm; Trajectory planning; Dynamic segmentation; Optimal Time
前言
随着制造强国战略的深入实施,机械臂在不同行业中得到广泛应用,已经成为衡量行业智能化程度的重要指标之一[1]。在运动空间随机采样,并对采样点进行筛选优化生成运动轨迹的采样插值轨迹规划方法是最常运用的[2]。Zheng等[3]提出一种“B-5-B”分段插值轨迹规划算法,提高了机械臂各关节角度、角速度和角加速度曲线的平滑性,降低了运动过程中关节所受到的机械冲击。
针对以上机械臂轨迹规划中的问题,本文从轨迹规划时长(算法复杂度)、各关节运动过程中的机械冲击以及运动时长三个角度展开研究,同时考虑到降低各关节运动过程中的机械冲击要优先于运动时长,提出一种基于改进粒子群算法的五次多项式动态分段插值轨迹规划方法,通过优化目标函数判断轨迹分段数量,达到运动过程中的机械冲击小的前提下,缩短轨迹规划和运动时长。
1改进粒子群算法机械臂运动学建模
1.1机械臂运动学分析
根据D-H参数,求解任意连杆坐标系i(i≤6)相对于相邻连杆坐标系i-1的坐标变换矩阵,各连杆通过将多个变换矩阵依次相乘建立运动学方程,得到末端执行器相对于基坐标系的坐标变换矩阵:
式中:表示机械臂末端x、y、z方向向量,表示机械臂末端相对于基坐标系的位置矩阵。
在已知机械臂正向运动学求解后,可通过式(1)左乘的逆矩阵得到机械臂各关节间的逆向运动学关系。
1.2五次多项式轨迹规划
五次多项式插值拟合算法是一种既能规避高阶多项式算法复杂度高,计算效率低的缺点,又能规避低阶多项式曲线拟合精度低的缺点的轨迹规划方法。五次多项式函数表达式为:
1.3动态分段目标函数的构建
机械臂轨迹规划在时间上的优化,要以保证机械臂满足运动学约束条件为前提。即各关节在运动过程中的角度、角速度、角加速度不会产生突变,且整体波动较小,不会产生机械冲击,损害机械臂使用寿命,基于动态分段思想构建使运动代价最低的目标函数:
式中:表示采用不同分段数量对应的整段轨迹上各关节角度、角速度、角加速度和角加加速度的整体变化量之和的最小值,表示权重系数,表示总分段数量,表示第段轨迹各关节角度位移变化量之和,表示第段轨迹各关节角度位移变化量之和的上限值,表示权重系数,表示机械臂自由度个数,表示第段轨迹各关节的角速度变化量之和、角加速度变化量之和或者角加加速度变化量之和,表示对应的变化量之和的上限值。
4仿真算法验证
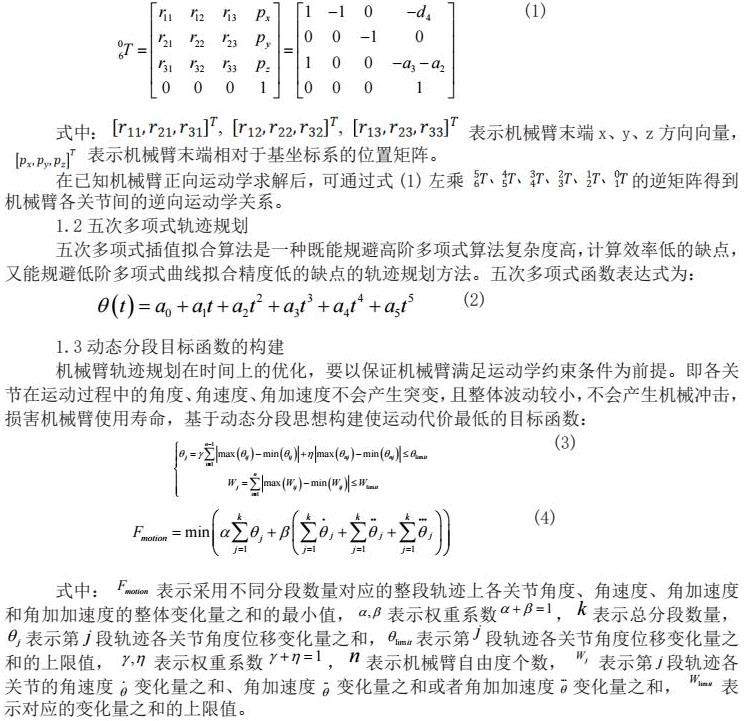
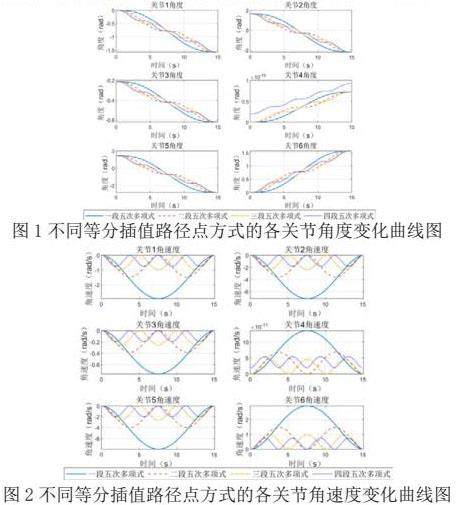
为验证本文提出算法的有效性,以六轴机械臂为研究对象,设置起点坐标X1(500,0,1000)、终点坐标X2(00,500,500),在姿态不变的情况下,采用等分插值路径点的方式,测试同一段轨迹在不同分段数量下的机械臂各关节角度和角速度信息如下图1-2所示。
由图1可知,随着等分插值路径点个数的增加,机械臂在运动过程中,整体角度变化区间趋于减小,说明角度变化平缓,不存在角度突变,但关节4的角度在采用3个等分插值路径点时,角度整体变化区间较大及此时关节4的运动平缓性较差。
由图2可知,随着等分插值路径点个数的增加,整体角加速度变化区间趋于减小,但始末时刻的角速度变化率增大及关节速度变化较快,此外关节4在整个运动过程中的速度均较大,且始末速度存在突变。
以上实验数据表明,本文提出的机械臂轨迹规划方法,能够有效降低机械臂运动过程中受到的机械冲击力,提高机械臂使用寿命,减少轨迹执行的时间,提高轨迹精度。
5结论
本文针对机械臂轨迹规划过程中机械冲击较大和轨迹运动时间较长的问题,基于改进粒子群算法的五次多项式动态分段插值的机械臂轨迹规划算法,从轨迹分段数量、运动过程中各关节角度、角速度变化范围两个方面优化轨迹,达到减小机械冲击,缩短运动时间的目的。
参考文献:
[1]陈柏,叶可,吴洪涛.“机器人+”背景下工业机器人技术创新发展方向[J].机械制造与自动化,2023,52(2):1-3.
[2LAMIRAUX F,MIRABEL J.Prehensile Manipulation Planning: Modeling,Algorithms and Implementation[J].IEEE Transactions on Robotics,2022,38(4):2370-2388
[3]郑涛,刘满禄.一种机械臂分段插值轨迹规划方法[J].机械设计与制造,2020(03):261-264.

 京公网安备 11011302003690号
京公网安备 11011302003690号


