



- 收藏
- 加入书签

基于深度学习的智能垃圾分类系统研究与实现
 打开文本图片集
打开文本图片集

摘要:本项目针对城市生活垃圾处理问题,设计并实现了一个基于yolov5和Jetson Nano的垃圾智控分拣器。该系统通过智能识别与自动化机械臂技术,实现垃圾的高效分类与处理,旨在减少环境污染,提升资源回收率,并促进环保意识的普及。
关键字:垃圾分类、yolov5、自动化
1.引言
随着城市化进程的加速,生活垃圾的处理问题日益严峻。传统的垃圾处理方式,如填埋和焚烧,不仅对环境造成严重污染,还浪费了大量可回收资源。本项目通过智能化技术提高垃圾分类的效率和准确性,减少人工分类的劳动强度,提升工作效益,同时降低环境污染,推动可持续发展。
2.系统设计
本系统设计包括六个主要模块:摄像头定位垃圾模块、垃圾桶监测传感器模块、垃圾分类机械臂模块、后台数据处理服务器、数据处理模块和客户端模块。
2.1 摄像头定位垃圾模块
该模块采用IMX219摄像头模组,这是一个800万像素的高清摄像头,负责捕捉垃圾图像,并通过yolov5算法进行垃圾种类的识别定位。
2.2 垃圾桶监测传感器模块
此模块集成了红外传感器、重量传感器,用于检测垃圾桶的满载情况。红外传感器通过发射和接收红外线来测量垃圾桶内垃圾的体积,重量传感器用于检测垃圾桶内垃圾重量,实现对垃圾桶满载状态的实时监测。
2.3 垃圾分类机械臂模块
该模块采用xy轴机械臂,能够根据摄像头模块的识别结果,将垃圾分拣至对应的垃圾桶。机械臂的设计灵活,能够适应不同形状和大小的垃圾,提高垃圾分类的效率。
2.4 后台数据处理服务器
云服务器选用阿里云平台,负责接收各模块传输的数据,进行数据处理和存储,并支持远程管理和监控。
2.5 数据处理模块
该模块基于传统算法和机器学习技术,对收集到的垃圾数据进行分析,优化垃圾分类算法。具体采用了一种结合了决策树(Decision Tree)和支持向量机的混合算法,即“DT-SVM”算法,用于对收集到的垃圾数据进行分析,并优化垃圾分类的准确性。
2.6 客户端模块
客户端模块使用HTML、Javascript、css制作网页端,提供用户界面,允许用户实时查看垃圾处理状态,接收垃圾分类报告和建议。客户端通过与服务器的交互,展示垃圾处理的实时数据和历史记录,增强用户体验和系统的透明度。
3.拟关键技术
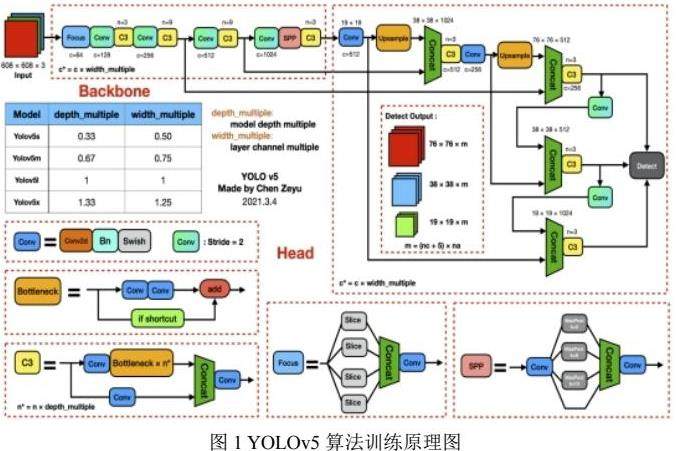
3.1 机械视觉算法的选择与优化
本项目选择了YOLOv5算法进行垃圾图像识别。YOLOv5通过CSPNet结构进行特征提取,将输入特征图分为两部分,一部分通过一系列卷积层处理,另一部分直接进行下采样,最后将这两部分特征图进行融合。这种设计使得网络具有更强的非线性表达能力,能够更好地处理目标检测任务中的复杂背景和多样化物体。为了提高识别准确率和处理速度,我们对YOLOv5进行了优化,包括图像数据增强,如随机裁剪、旋转和翻转,以增加模型的泛化能力。
3.2 路径规划算法的选择
为提高机械臂的工作效率,本项目采用了基于采样的路径规划算法——改进的RRT(Rapidly-exploring Random Tree)算法。我们结合了RRT*和RRT-connect算法的优点,应用目标采样的思想加强算法向目标点搜索的趋向性,结合五次B样条插值对路径平滑优化,使机械臂可在较短时间规划出更优路径。
4.系统实施
4.1 硬件部分
4.1.1 摄像头定位垃圾模块
该模块采用IMX219高清摄像头模组,与Jetson Nano配合使用,实现垃圾图像的实时捕捉和处理并能够运行复杂的机器学习模型以YOLOv5进行快速准确的图像识别。
4.1.2 垃圾桶监测传感器模块
此模块集成了多种传感器,包括红外传感器和重量传感器,用于监测垃圾桶的满载状态。传感器数据通过无线模块传输至云服务器,实现实时监控和预警。
4.1.3 垃圾分类机械臂模块
机械臂模块采用高精度的步进电机和伺服电机,确保精确的定位和操作。机械臂根据Jetson Nano的处理结果,自动将垃圾分拣到相应的垃圾桶中,提高分类效率。
4.2 软件部分
4.2.1 后台数据处理服务器
云服务器基于阿里云平台,采用分布式架构,确保数据处理的高效率和高可用性。服务器负责接收传感器数据、图像识别结果,并进行存储和分析,同时支持远程管理和监控。
4.2.2 数据处理模块
数据处理模块采用改进的RRT算法,结合机器学习技术,对收集到的垃圾数据进行分析,优化垃圾分类算法。该模块能够根据历史数据和实时反馈,不断调整和优化分类策略,提高系统的准确性和效率。
4.2.3 用户端模块
用户端模块使用HTML、Javascript、css等前端技术,开发网页端应用。用户可以通过图形界面实时监控垃圾处理过程,接收分类报告,以及提供反馈。用户端模块还提供教育信息和环保宣传内容,提高公众的环保意识和参与度。
5.结语
本项目通过设计并实施基于YOLOv5垃圾智控分拣器,实现了垃圾分类的自动化和智能化。系统提高了垃圾分类的效率和准确性,助力于减少环境污染,提升资源回收率,推动环保意识的普及。随着技术的不断进步和优化,该系统有望对城市垃圾处理发挥更大的作用,为实现可持续发展目标做出贡献。
参考文献
[1]高明, 高明, 张泽慧, 等. 基于新型空间注意力机制和迁移学习的垃圾图像分类算法[J]. 系统工程理论与实践, 2021, 41(2): 498-512.
[2]郭昌鑫, 陈公兴. 基于深度学习的智能垃圾桶识别分类系统[J]. 科技与创新, 2020(12): 30-31+35.
[3]黄国维. 基于深度学习的城市垃圾桶智能分类研究[D]: [硕士学位论文]. 淮南: 安徽理工大学, 2019.

 京公网安备 11011302003690号
京公网安备 11011302003690号


