



- 收藏
- 加入书签

一种基于电磁-机械复合技术的单人逃生器成套系统设计
摘要:针对目前逃生器结构复杂和逃生效率低的问题,提出电磁-机械复合控制技术。首先设计了双线圈对称布局的电磁铁模块,通电后产生垂直磁场驱动夹板闭合。夹板与矩形截面绳索的接触面经特殊处理形成高摩擦制动界面,大幅提升制动力稳定性与调节精度。速度控制通过动态调节夹板摩擦力实现,调节电磁铁电流以改变夹板压紧程度,确保全工况可靠调节,实现高效、精准的逃生速度控制。 关键词:逃生器,逃生带,夹板,电磁-机械复合
Abstract : Aiming at the problems of complex structure and low escape efficiency of the current escape device, an electromagnetic-mechanical composite control technology is proposed. Firstly, the electromagnet module with double coil symmetrical layout is designed, and the vertical magnetic field is generated after energization to drive the splint to close. The contact surface between the splint and the rectangular section rope is specially treated to form a high friction braking interface, which greatly improves the braking force stability and adjustment accuracy. The speed control is realized by dynamically adjusting the friction force of the splint, adjusting the electromagnet current to change the clamping degree of the splint, ensuring reliable adjustment of the whole working condition, and achieving efficient and accurate escape speed control.
Keywords: Escape device, Escape belt, Splint, Electromagnetic-mechanical composite
0.引言
近几年来,随着国内高层建设群不断增多,高层建筑发生火灾事件屡见不鲜。发生火灾时如何逃生一直是行业类特别是消防装备厂家及其他相关研究者不断探索的技术难点[1]。目前国内外针对高层建设火灾的逃生热点、难点问题也产生非富的研究成果。其中单人逃生器的技术发展呈现出多元化与智能化趋势,但核心设计仍存在显著缺陷。在国内,主流技术集中于机械摩擦式与缓降器结合方案,但实际应用受限于速度控制与使用难度的问题。国外技术更注重轻量化与集成化,如德国Dräger的逃生面具集成缓降器,成本高昂且维护复杂。
当前技术的主要设计缺陷集中在三方面:一是动态控制精度不足,现有机械夹紧机构在高温下易出现磁力衰减或摩擦系数突变,导致下滑速度失控;二是人机适配性差,多数产品未考虑不同体重用户的个性需求,手动调节依赖经验,紧急状态下操作容错率低[2-3]。
针对传统逃生器的各种问题,本文采用一种复合材料代替钢丝绳作为逃生带,如芳纶纤维、超高分子量聚乙烯、碳纤维增强热塑性带和玄武岩纤维绳等等,不仅结实耐用、可折叠卷存,而且耐高温,且可以在材料表面进行一定的粗糙度,产生一定的摩擦作用。逃生器采用夹板式可调压力的方式,根据压力大小来调节下滑速度。这样不仅方便快捷,还保证了高效实用性。
1.逃生器结构原理
根据目前火灾发生时的现场情况来分析,单人逃生器在使用时方便灵活,可适合年轻人群快速逃生,其工作原理如图所示:
图中1—逃生带,2—右操纵杆,3—逃生器控制柜,4—右操纵把手,5—安全带套环,6—控制柜锁紧扣(上下各一个),7—安全带,8—可伸缩坐椅,9—逃生带固定销穿孔,10—左操控把手。火灾发生时,逃生器控制柜锁紧扣6打开,将逃生带穿过控制柜,合上控制柜后,系上安全带7,坐上坐椅8,握紧左边操纵杆10,调节右边操作杆上的把手4即可按操控的速度下滑。如果下方有情况,可随时操作左边操控把手10,使逃生器制动。具体控制原理见图2。
图1 单人逃生器工作原理
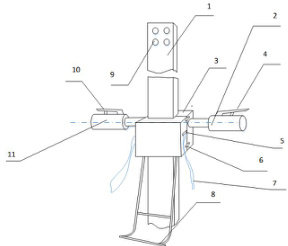
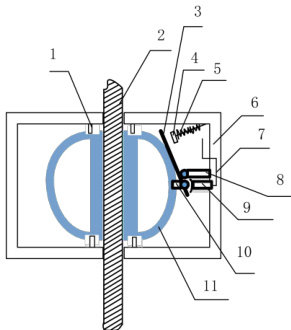
图2中(只画了右边部分,左边与右边结构相同),1—夹板防脱板,2—逃生带截面,3—施压杠杆,4—衔铁,5—电磁线圈,6—控制柜体,7—制动杆,8—杠杆支撑,9—制动块,10—杠杆支点,11—夹板模块。工作原理是通过调节5电磁线圈电流来调节3对11夹板的压力来调节夹板与逃生带表面的摩擦力,最终可以调节下滑速度。电磁线圈是通过备用电池来供电,电流大小,由变流器根据需要来调节开关管的占空比来获得,图中电源及变流器未画出。
图2 逃生器控制柜结构
2系统工作原理分析
逃生器采用创新的电磁-机械复合制动设计,核心部件为双线圈对称布局的电磁铁模块。当系统通电时,电磁铁产生垂直于绳索宽面的强磁场,推动钨钢合金夹板闭合。夹板与绳索的接触面经过特殊处理,形成高摩擦系数的制动界面。为保证平板与逃生带接触面充分接触。绳索采用矩形截面设计,双宽面接触结构使摩擦面积达到传统圆形绳索的3到5倍,显著提升了制动力的稳定性和调节精度。
速度控制主要通过动态调节夹板与绳索间的摩擦力实现。系统根据实时速度检测结果,通过精密电流控制改变电磁铁吸力,进而调整夹板对绳索的压紧程度。这种设计使得制动力确保在任何工况下都能实现可靠制动。
根据动力学原理,系统受力平衡方程为:
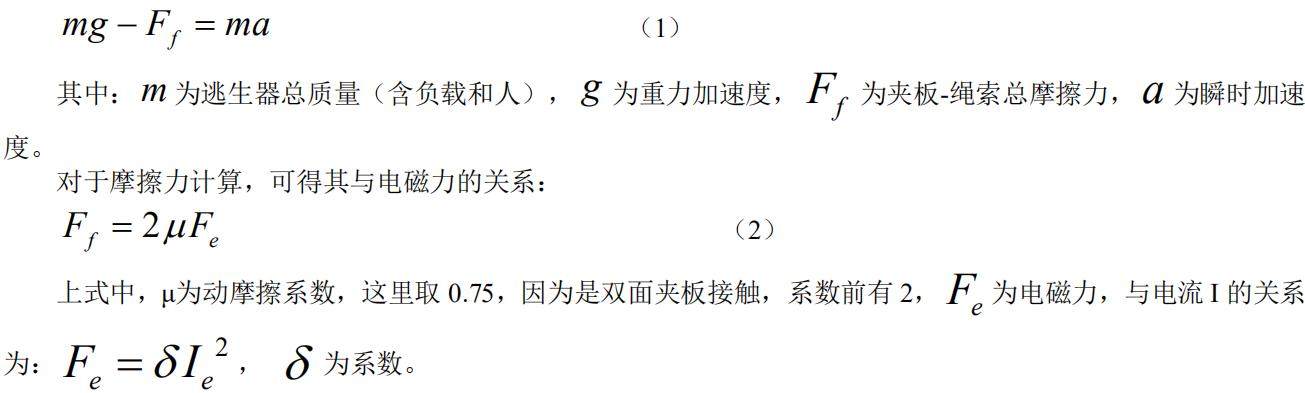
3.仿真验证
为体现一般性,假设逃生器载重以100公斤(人和逃生器总重量)为例,逃生器通过夹板机构与高强度复合材料制作的扁平状逃生带下滑,逃生带截面的长为15cm、宽1cm。表面有一定的摩擦粗糙度0.75。下滑时,逃生器夹板系统夹紧逃生带对称两面,单面接触面为15cm*20cm,夹板的松和紧可改变逃生器与逃生带之间的摩擦力,即可以调节下滑速度。运行开始(下滑前)前,以最大压力压住接触面,使逃生器与人静止于逃生带上,然后慢慢减小压力,使逃生器从0开始启动下滑,保持下滑过程中小于当下滑速度0.7m/s(目标速度),快接近0.7m/s时,压力慢慢增加,直到速到为0.7m/s时,压力增大到能使逃生器以均速下滑。要求从0m/s到0.7m/s的时间为10s。设下滑过程中摩擦系数不变。
仿真验证借助AI编写相关程序,并基于MATLAB R2013b运行环境,程序运行时间15s,运行结果如图3所示。
target_speed = 0.7; % 目标速度(m/s)
sim_time = 15; % 仿真时长(s)
dt = 0.01; % 时间步长(s)
time = 0:dt:sim_time; % 时间向量
speed = zeros(size(time)); % 速度向量初始化
mu = 0.75; % 摩擦系数
area = 0.15*0.20; % 单侧接触面积(m^2)
mass = 100; % 总质量(kg)
g = 9.81; % 重力加速度(m/s^2)
% 初始压力计算(保持静止)
% 最大静摩擦力 = μ*N = mg => N = mg/μ
initial_pressure = (mass*g)/(mu*area*2); % 双侧总压力(Pa)
% 压力调节函数(随时间变化)
pressure = zeros(size(time));
for i = 1:length(time)
if time(i) < 10
% 前10秒线性减小压力实现加速
pressure(i) = initial_pressure*(1 - time(i)/10);
else
% 10秒后保持恒定压力维持目标速度
pressure(i) = (mass*g - target_speed*sqrt(2*mass*g*mu*area))...
/(mu*area*2);
end
end
% 速度计算
for i = 2:length(time)
% 总摩擦力 = 2*μ*pressure(t)*area (双侧)
friction = 2 * mu * pressure(i-1) * area;
% 净力 = 重力 - 摩擦力
net_force = mass*g - friction;
% 加速度 = 净力/质量
acceleration = net_force / mass;
% 更新速度
speed(i) = speed(i-1) + acceleration * dt;
% 确保速度不超过目标值
if speed(i) >= target_speed
speed(i) = target_speed;
end
end
% 绘图
figure;
plot(time, speed, 'LineWidth', 2);
grid on;
xlabel('时间 (s)');
ylabel('速度 (m/s)');
title('逃生器速度收敛过程');
ylim([0 target_speed*1.1]);
xlim([0 sim_time]);
% 标记目标速度线
hold on;
plot([0 sim_time], [target_speed target_speed], 'r--');
legend('实际速度', '目标速度');
hold off;
图 3 运行结果
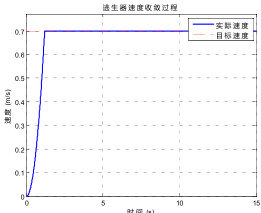
表1 电流与电磁力之间在关系

由图3及表1可以看出,下滑过程中,速度达到目标速度后,过渡过程平顺,稳定之后运行平稳,说明该逃生器系统设计方法正确有效。
4.结论
本文针对逃生器结构复杂和逃生效率低的问题,提出电磁-机械复合控制技术。通过仿真验证了单人逃生器系统的控制功能:通过调节夹板对高强度扁平逃生带(15cm×1cm截面)的压紧力控制下滑速度。系统在设定恒摩擦特征基础上,结合电流控制,使制动力与下滑力实时匹配,最终稳定在0.7m/s的安全速度。该设计兼顾启动平顺性与速度稳定性,验证了电磁调节在逃生制动中的可靠性与响应精度。
参考文献
[1]毕晓君,孙梓玮,刘进.高层火灾智能报警及逃生指导系统[J].智能系统学报,2022,17(4):814-823.
[2]赵高前,张海龙,董军.建筑火灾及安全逃生方法研究[J].建筑安全,2021(2):33-36.
[3]陈卫国.高层建筑的消防灭火与逃生对策[J].消防界:电子版,2016(2):61-62.
基金项目:2024年嘉兴大学国家级大学生创新创业训练计划项目 “一种小型单人滑落式可控式火灾逃生器”(项目编号:202410354063X)
作者简介:王小兰(2004—),女,嘉兴大学本科电气23级学生。
指导教师:张今朝(1971—),男,工学博士,教授,嘉兴大学机械工程学院电气工程及其自动化专业教师。

 京公网安备 11011302003690号
京公网安备 11011302003690号


