



- 收藏
- 加入书签

一种水上垃圾清理装置的设计及性能分析
 打开文本图片集
打开文本图片集
摘要:为有效收集水上垃圾,设计了一种水上垃圾清理机器人,以太阳能作为主要能源,通过船身前方的半伞式收集器通过丝杆电机开始合拢进行垃圾收集,收集的垃圾会被传送带送至垃圾粉碎处,经粉碎的垃圾会被底部的推杆进行压缩并推至储物仓处。产品的转向利用差速法控制船体运动方向,无人机进行水面扫描确定垃圾精确位置,并传回船体系统进行分析自动规划最佳路线。确定路线后人工操控水下推进器启动,在收集水面垃圾的同时油污收集器启动收集沿途的水面油污。在船体周边还设有可以增加浮力的浮筒,使其平稳行驶在水面上。
关键词:水上垃圾清理机器人;太阳能;半伞式;差速法;油污收集器;无人机
0、引言
当下,水面上的漂浮物对人们的生产生活产生很大的不良影响,亟待解决。为此,使用现代化工具收集处理水面垃圾是很有必要且更高效的处理方式。下文对此产生思考,并针对其出现的问题提出了相应的设想,探讨收集漂浮垃圾的产品的相关功能和机构设计,构想出了以“浮艇”为参照对象的该水上垃圾清理机器人,以湖面或河道为对象进行垃圾清理收集,并提出了具体的清理方法和工作原理。
1、设计方案
1.1 总体设计构想
本产品的设计理念是将传统的船体结构进行改造,并在其中加入搜索、回收、粉碎、压缩、收集、处理等装置,并进行智能化处理,使其能够进行初步的自动化运作。综合考虑各种因素以及实验结果,通过各类机械机构的运作,本产品拥有操作简单、实用性强以及多功能化等优势。
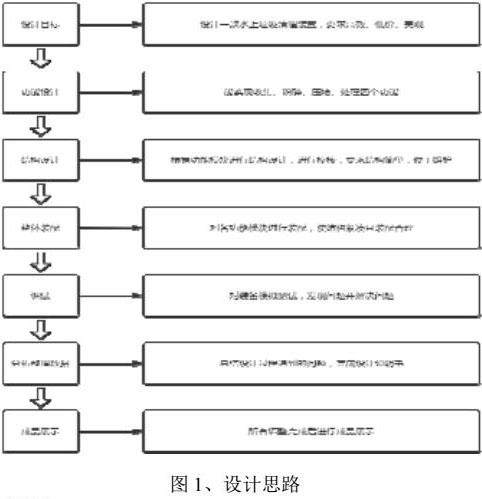
1.2 设计思路
本设计的具体思路如图所示:
1.3 收集系统设计
当船体置于水面时,其自动与水面持平,此时机器人率先放出无人机,船体根据无人机确定的最佳路线行驶,当船体运动至垃圾处时,半伞式收集器通过丝杆电机开始合拢进行垃圾收集,收集的垃圾会被传送带送至垃圾粉碎处经粉碎的垃圾会被底部的推杆进行压碎并推至储物仓,同时油污收集器启动收集沿途的水上油污并同时清洗吸附物。至此一套垃圾回收程序完成。
作为垃圾压缩的主要装置,压缩活塞通过推动滑轨带动压缩腔内的压缩快,实现对垃圾的压缩。压缩活塞的行程可通过人工手动修改,保证走完一个行程,垃圾刚好达到设计的压缩密度;之后压缩活塞回程、复位,此时经过压缩处理的垃圾进入到打包位置。进一步分析压缩活塞的结构,核心构件是压缩快,材质方面同样采用经过防腐工艺处理后的高强度钢板;此外还有液压缸,是提供压缩动力的主要构件,以及承载上下板和侧板的内部支架。在设计压缩活塞时,除了要考虑结构型式和构件材质外,压缩块的数量、布置方式等,也是设计时要考虑的重点内容。
1.4动力系统设计
为了完成环保、节能、高效的水上垃圾清理装置设计,水上垃圾清理机器人锂电池作为动力源,同时配置太阳能追踪系统收集太阳能将其储存备用。船体配备有两个风扇式高速水下螺旋桨,通过差速法实现其传向功能,船身搭配有蓝牙接收器实现对船的控制和水上画面的接收。
为了有效提高太阳能追踪系统的能源利用率,设计合理的追光模式是其关键环节之一。目前常用的追光方法主要有四点追光法和五点追光法。五点追光法将位于原点处与其他位于4个象限的光敏电阻传感器检测数据分别计算得出太阳光方位,实现追光。而四点追光法则去掉原点处光敏电阻传感器,直接将4个象限的检测数据比较计算,最终达到追光目的,其算法相对较为简单,且容易在此基础上进行改进。在光伏板的追光运动方面,我们创新性的使用了相切放置,将光伏板的底座设计为与圆形光伏板相切,这样光伏板在运动过程中会时刻与底座紧密贴合,极高的节省了光伏板的材料以及利用率。
2、性能分析
该水上垃圾清理机器人设有垃圾搜索、回收、粉碎、压缩、收集等装备。无人机会对水面进行扫描确定垃圾的精确位置,然后将其传回船体系统进行分析自动规划最佳路线,确定路线后水下推进器启动,由操作人员控制船体行驶至目标位置,到达指定水面漂浮物附近后,船身前方的半伞式收集器通过丝杆电机开始合拢进行垃圾收集,收集的垃圾会被传送带送至垃圾粉碎处,经粉碎的垃圾会被底部的推杆进行压缩并推至储物仓处,至此一套垃圾回收程序完成。
产品的转向利用差速法控制船体运动方向,依靠船体两侧的浮筒平稳的行驶在水面上。船体底部设置的螺旋桨为其提供前进动力,在船体底部及四周设有均匀分布的小孔来进行船舱内的排水,在储物舱中,被回收的垃圾会被压缩以提高回其空间利用率。
为了实现环保、节能、高效的水上垃圾清理装置设计,水上垃圾清理机器人采用锂电池作为动力源,同时配置太阳能追踪系统收集太阳能,将这些能量储存起来后备用,使设备能够在一定的周期内连续不断的工作,而且可以减少外部能量供应,更加节能高效。
除了漂浮性的海洋垃圾外,水上垃圾清理机器人还设有吸附设备来吸附水面上的原油污染,在收集水面垃圾的同时油污收集器启动收集沿途的水面油污,维护水体生态平衡。
3、应用
3.1工作流程
本产品为水上垃圾清理机器人,是沿江、沿湖、沿海地区水上垃圾处理的一种工具,它灵活方便,节约用地,设有垃圾搜索、回收、粉碎、压缩、收集等装备,主要用于水上垃圾的收集。
无人机在进行水面扫描确定垃圾精确位置后,船体系统会进行分析自动规划最佳路线,水下推进器启动,操作人员可通过遥控器控制船体运动,当到达指定水面漂浮物附近时,船身前方的半伞式收集器进行垃圾收集,垃圾由传送带送至垃圾粉碎处粉碎,底部的推杆进行压缩并推至收集处,至此一套垃圾回收流程完成,在收集水面垃圾的同时油污收集器启动收集沿途的水面油污,实现定位实现清污工作。
3.2 垃圾识别
社会光速发展,于此同时水上垃圾也是日新月异,这对我们的垃圾时别系统而言是个不小的挑战,为了提高数据处理和查询效率,并支持用户便捷地访问、管理、修改、更新、控制和组织数据。因此在垃圾识别这一块我们将建立数据库,将全国各地识别到的垃圾数据化,并统一整合在我们的的数据库中。
3.3远端控制
我们将会把产品的控制系统接入互联网中,使产品摆脱传统的遥控器控制,使用户能用电脑、手机甚至手表等电子工具在任何地方随时随地的管理与控制我们的产品。最后将接入物联网系统实现万物互联。使我们的产品能与其他工作设备起化学作用。
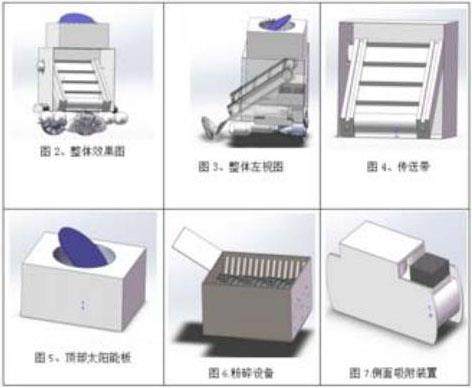
4、设计图纸展示
4.1 3D模型展示
参考文献:
[1]王小芳,杨玲娟,从我国水资源的现状论水污染治理的策略[J],天水师范学院学报,2001年第5期41-43,共三页
[2]陈沛宇,欧阳华兵,何克劲,胡三,钱立松,孟润心.基于Arduino单片机的太阳能目标追踪系统设计[J].上海电机学院学报,2019,22(05):255-261.
[3]白云涛,佟百岩,李楠.城市生活垃圾压缩打包机的结构设计[J].科学技术创新,2021,(25):186-187.
[4]王广义.水下推进器的自适应PID控制[D].青岛:中国海洋大学,2007.12.
[5]魏浩,杨德日,郭成英,吴蒙蒙.基于光敏电阻的太阳追踪控制系统设计研究[J].电子世界,2016(08):57.DOI:10.19353/j.cnki.dzsj.2016.08.033.
[6]焦桔萍,周红梅,宁海峰,郭西园.垃圾压缩设备的腐蚀与防护[J].机械管理开发,2019,34(10):252-254.DOI:10.16525/j.cnki.cn14-1134/th.2019.10.106.
[7]水上清洁机器人[J].李敏.包装工程.2018(12)
[8]面向城市内河水面漂浮物清理的无人船系统设计[J].张馨雨,那睿奇,黄宁远,王亚炜.电子测试.2021(17)
[9]水上行走机器人[J].吴立成,孙富春,袁海斌.机器人.2010(03)
[10]基于单片机控制的水上清洁机器人液压系统的开发[J]. 吴怀超,方毅,何林.液压与气动.2011(01)
[11]新型水上救援机器人设计研究[J].滑玉辉,滑玉卿.机械工程师.2010(07)
[12]孙亚军.小型水域垃圾清理机器人的研制[D].昆明:昆明理工大学,2018
[13]王海梅.对垃圾回收利用的经济分析[J].时代金融,2014(32):269+276

 京公网安备 11011302003690号
京公网安备 11011302003690号


