



- 收藏
- 加入书签

基于测量机器人的基坑变形自动化监测技术应用研究
 打开文本图片集
打开文本图片集

摘要:本研究旨在探索并应用基于测量机器人的基坑变形自动化监测技术。通过使用测量机器人对基坑进行自动化监测,可以实时获取基坑的变形信息,提高监测效率和监测准确性。本研究采用了先进的测量仪器和算法,开发了一套完整的基坑变形监测系统,并在实际工程中进行了验证。研究结果表明,基于测量机器人的基坑变形自动化监测技术具有较高的可行性和实用性,为基坑工程的安全监测提供了有效的手段。
关键词:测量机器人;基坑变形监测;自动化;监测技术
基坑工程是现代建筑施工中常见的一种工程形式,其变形监测对保证工程安全至关重要。传统的基坑变形监测方法通常依赖于人工测量,存在测量周期长、数据处理复杂等问题。随着机器人技术的发展,将测量机器人应用于基坑变形监测成为可能。测量机器人具有自主性、高精度和高效率的特点,可以实现对基坑变形的实时监测和数据采集。因此,有必要探索基于测量机器人的基坑变形自动化监测技术。
1工程概况
某深大基坑工程位于杭州市拱墅区东新路与石祥路交叉口西南角,总建筑面积待定。该工程计划建设高层住宅、洋房住宅、高层酒店公寓等,采用钻孔灌注桩基础。由于基坑形状不规则,周边环境复杂,因此对基坑变形的严格控制显得尤为重要。在开始施工之前,原有场地上的建筑物已经被拆除,但留下了一些建筑垃圾和生活垃圾,需要进行妥善处理和清除,以确保施工的正常进行。此外,受影响的土层主要包括填土、粉质粘土和淤泥质粘土,这些土层具有高压缩性和土力学性质较差的特点。为了应对这些挑战,本工程采用了基于测量机器人的基坑变形自动化监测技术。通过使用测量机器人进行自动化监测,可以实时获取基坑变形信息,从而提高监测效率和准确性。针对土层的特性,施工过程中还将采取相应的土工措施,减小土层的变形潜力,确保基坑的稳定性和安全性。
2基于测量机器人的基坑变形自动化监测系统的设计
2.1系统需求分析
根据工程需求,本系统需满足如下要求:(1)需要高精度的测量数据,以便及时准确地捕捉基坑的变形情况。(2)测量机器人需要能够自主导航到指定的监测点位,以实现全面的基坑覆盖。这要求机器人具备感知环境和路径规划的能力,能够避开障碍物并准确到达目标位置。(3)为了获取更全面的基坑变形信息,测量机器人应该集成多种传感器,如激光扫描仪、摄像头、惯性导航系统等。通过融合多种传感器的数据,提高监测的准确性和可靠性。(4)基坑变形监测需要实时获取数据,并及时传输到监测中心进行处理和分析。因此,测量机器人需要具备快速的数据采集和传输能力,以确保监测数据的及时性。(5)基坑变形监测一般需要持续较长时间,测量机器人需要具备较长的运行时间和自主充电能力,保证监测任务的连续性和稳定性。(6)基坑变形监测是一项重要任务,对系统的可靠性和安全性要求较高。测量机器人应具备故障自诊断和恢复能力,同时要保障数据的安全传输和存储。
2.2系统硬件配置
为了满足本基坑高精度监测的特点,监测系统采用了高精度的测量机器人徕卡TM50。这款机器人具有伺服马达和自动目标识别装置ATR1,并能够通过发射激光束并反射预埋的大量标志点实现自动寻找和精确照准目标。此外,系统还使用了360度棱镜进行反射,以提高监测数据的准确性。除了测量机器人外,系统还需要使用一台便携式笔记本电脑作为控制中心,对机器人进行实时指挥和监测数据处理。台笔记本电脑需要具备较高的性能,保证监测数据的实时处理和传输。从整体上看,本监测系统采用了高精度测量机器人徕卡TM50、预埋大量标志点、360度棱镜和便携式笔记本电脑等硬件设备,这些设备将有效提高基坑变形监测的效率和准确性,为工程实践提供了可靠的技术支持。
2.3系统软件配置
本系统采用了C#语言作为开发语言,并基于Visual Studio 2008平台进行开发。同时,系统调用了Geo COM接口来实现基坑变形测量机器人自动化监测系统的数据采集模块。这些技术和工具的使用,不仅提高了系统的开发效率和稳定性,同时也降低了开发成本,并且保证了系统的易用性和可维护性,为基坑变形监测提供了可靠的数据采集支持。
2.4基坑变形监测流程
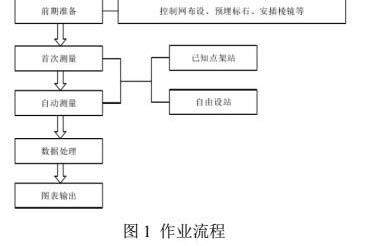
系统硬件设计包括高精度测量机器人徕卡TM50、预埋大量标志点、360 度棱镜和便携式笔记本电脑。在首次测量中,需在测量场地安装棱镜,在后续测量中仅需借助仪器定向自动观测。
2.5软件系统设计
2.5.1管理模块
管理模块是基坑变形测量机器人自动化监测系统的重要组成部分,负责管理和控制整个系统的运行。该模块主要包括如下几部分:(1)用户管理包括用户注册、登录、权限管理等。通过用户管理功能,管理员可以对系统进行授权和权限设置,确保只有经过授权的用户才能访问系统的各项功能。(2)任务调度包括任务的创建、分配、执行和监控等。管理员可以根据需要创建任务,并将任务分配给指定的机器人进行执行。同时,管理员可以实时监控任务的执行情况,以便及时做出调整和处理异常情况。(3)管理模块需要实现数据管理功能,包括数据采集、存储和查询等。系统调用Geo COM接口来实现基坑变形数据的采集,并将采集到的数据存储到数据库中。管理员可以通过数据管理功能进行数据查询和分析,以便得到准确的变形监测结果。(4)记录系统的运行日志和操作日志。通过日志管理功能,管理员可以查看系统的运行情况和用户的操作记录,以便进行系统维护和安全审计。
2.5.2自动观测功能
自动观测是基坑变形测量机器人自动化监测系统的关键功能之一,它通过机器人自主进行测量和观测,实现对基坑变形的实时监测。首先需要进行路径规划,即确定机器人在基坑内部的观测路径。路径规划算法可以根据基坑的形状和尺寸进行优化,确保机器人能够高效地覆盖整个基坑区域。机器人需要搭载各种传感器,包括激光测距仪、摄像头、倾角仪等,以实现对基坑变形的测量和观测。这些传感器将与系统进行接口集成,通过调用Geo COM接口获取传感器数据,并将数据传输到系统中进行处理和分析。为了实现系统各项功能,采用数据滤波、特征提取、变形计算等算法,获得准确的变形监测结果;当系统检测到基坑变形超过预设阈值或出现其他异常情况时,向管理员发送报警信息。
2.5.3数据处理模块
数据处理模块负责对从传感器获取到的数据进行处理和分析,以得出准确的基坑变形监测结果。数据处理模块首先进行数据预处理,包括数据清洗、去噪和异常值处理等,消除传感器数据中的噪声和异常值,提高数据的准确性和可用性。在数据预处理之后进行特征提取,将原始数据转换为更具有代表性和可解释性的特征,以便后续的变形计算和分析。本系统使用傅里叶变换、小波变换、时域特征提取等方法来提取数据特征。基于特征提取得到的数据特征,数据处理模块进行变形计算。变形计算可以采用不同的算法和模型,如形状匹配、拟合曲线等,根据实际情况选择最适合的方法。变形计算的目标是得出基坑的变形量和变形趋势,以便进行安全评估和预警。数据处理模块进行数据分析和建模,以获取更深入的洞察和分析结果。数据分析可以包括趋势分析、异常检测、相关性分析等,帮助管理员了解基坑变形的动态变化和潜在风险。数据建模可以采用统计模型、机器学习算法等,进行更精确的预测和预警。
3基于测量机器人的基坑变形自动化监测技术的应用
3.1位移监测
位移是评估基坑变形和土体稳定性的重要指标之一。测量机器人通过搭载高精度的位移传感器和激光测距仪等设备,可以实时、连续地监测基坑内部和周边土体的水平位移和竖向位移。对于水平位移的监测,测量机器人沿着基坑边缘或者埋设的测点进行数据采集,通过与参考点的相对位置变化来计算位移量。同时,利用机器人配备的激光测距仪,测量不同深度的水平位移,从而获得整个基坑内土体的位移分布情况。竖向位移的监测通过设置嵌入式竖向位移传感器或者测斜仪等设备来实现。测量机器人精确读取这些传感器的数据,并结合基坑不同深度的竖向位移信息,进行全面的变形分析和预警。
3.2轴力监测
轴力是指土体内部或者周边支撑结构所受到的力的大小。测量机器人通过搭载轴力传感器,可以实现对基坑支撑结构和土体的轴力监测。在施工期间,通过触点式或者无损式传感器进行轴力监测。触点式传感器可以直接与支撑结构接触,测量支撑结构的轴力变化。无损式传感器则通过利用电阻应变、红外光纤等原理,实现对土体轴力的非接触式监测。通过持续监测轴力的变化,及时发现支撑结构的变形情况和土体的受力状态,为施工管理提供重要的参考依据。同时,通过与位移数据的分析,可以进一步评估土体的稳定性和结构的安全性,并及时采取相应的措施。
3.3测点设置
首先需要确定要监测的基坑区域。监测区域应覆盖整个基坑范围及其周边土体。通过了解工程设计和基坑施工方案,可以确定监测区域的大小和形状。制定测点布设方案是保证监测数据准确性和有效性的重要步骤。根据监测目的和监测参数(如位移、轴力等),确定需要布设的测点类型和数量。根据实际需要,可以选择不同类型的测点进行布设。测点的布设密度直接影响到监测数据的精确性和全面性。一般来说,监测区域内重要结构和影响土体稳定的区域应当布设更密集的测点,以获得更详细的数据。其他区域可以根据具体情况适量减少测点数量。
4基于测量机器人的基坑变形自动化监测技术的应用实践
基于上述监测系统,现对本工程基坑变形问题进行自动化监测,详见如下:
4.1深层土体水平位移监测
借助测量机器人对基坑变形问题进行检测。结果显示,位于基坑东北角三层地下室中部的CX21测点,最大深层土体水平位移约为37.80毫米,这表明该处土体已经发生了明显的变形。进一步的监测结果显示,最大水平位移位置也在北侧三层地下室。这说明在该区域,整体变形较其他区域大,这主要是由于该处基坑形状为钝角,支撑局部刚度弱且淤泥质土层加厚约3米所致。最大水平位移发生在淤泥质粉质粘土层中,呈“弓”形,符合桩多道支撑支护形式变形特性。
4.2工程周边地表沉降监测
根据基坑周边地表沉降数据显示,经过监测,发现最大沉降点位于北侧三层地下室中部。该位置为开挖深度较深的地方,最大竖向位移为11.14mm,与地表沉降监测结果基本一致。这表明,在地下室开挖过程中,基坑变形较为明显,需要在施工中采取有效的措施来保证基坑稳定性。为了保证基坑的稳定性,施工过程中需要采取一系列的有效措施。首先,可以采用适当的支护结构,如钢支撑或混凝土墙支撑,以增强基坑的承载能力和抗沉降能力。这些支护结构可以有效地分担土体的荷载,减小基坑变形的风险。其次,应合理控制开挖的深度和速度。过快或过深的开挖会导致土体失去支撑,从而引发较大的沉降和位移。因此,在施工过程中,需要根据地质条件和工程要求,制定合理的开挖方案,逐步进行开挖,并及时监测基坑变形情况。
4.3电缆通道沉降监测
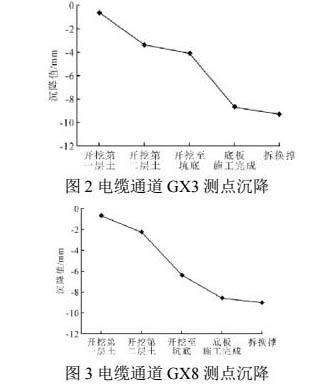
市政管线电缆通道距离基坑较近,具体位置分别在基坑的北侧和西侧。为了监测市政管线的沉降情况,选择了北侧的GX3和西侧的GX8作为监测点。在基坑开挖期间,市政管线发生了明显的沉降变化,其中最大沉降点位于基坑北侧中部的GX3位置。在进行拆换撑的工程操作时,GX3位置的市政管线发生了19.59毫米的最大沉降量。通过观察图表2和图表3中的典型电缆通道沉降-时间变化曲线,可以清晰地看到沉降量的变化趋势。然而,在地下室底板浇筑完成后,电缆通道的沉降量逐渐趋于稳定并收敛到一个相对较小的范围内。这表明在基坑开挖后的施工过程中,采取的支护措施和工程操作对于保护市政管线的稳定起到了积极的作用。
4.4应用效果
运用本系统对该工程基坑变形问题进行监测,测量机器人能够自主地在基坑内进行监测任务,不需要人工干预和操作,大大提高了监测效率。相比传统的人工监测方法,节省了人力资源和时间成本。测量机器人能够实时采集基坑变形数据,并通过无线传输技术将数据传送到监测中心或云端平台。监测人员可以随时获取最新的监测数据,及时发现异常情况,确保工程安全且如序开展。
结束语:
综上所述,本研究通过对基坑变形自动化监测技术的应用研究,为基坑工程的安全监测提供了一种新的解决方案。通过使用测量机器人进行自动化监测,可以实现对基坑变形的实时、准确监测,提高了监测效率和数据处理的速度。本研究的成果在实际工程中得到了验证,证明了基于测量机器人的基坑变形自动化监测技术具有较高的可行性和实用性。
参考文献:
[1]戴清宝. 深基坑变形数值模拟结果与监测数据对比分析[J]. 陶瓷, 2023, (11): 173-175.
[2]刘成洲, 张圣山, 于健, 张国梁, 孙文豪, 刘钊. 基于时序InSAR技术的基坑变形监测及精度分析[J]. 中国港湾建设, 2023, 43 (10): 20-25.
[3]吴光进, 赵言飞, 靳博路. 复杂环境下超大深基坑开挖变形监测数值模拟研究[J]. 建筑机械, 2023, (09): 87-92.
[4]隋腾飞, 黄建伟, 余敏. 基于近景摄影测量的高精度基坑变形监测技术研究[J]. 合肥工业大学学报(自然科学版), 2023, 46 (06): 828-832.
[5]李文杰, 赵杰. 基于HSS模型与分布式光纤监测的内支撑深基坑变形特性分析[J]. 科学技术与工程, 2023, 23 (18): 7913-7923.
[6]吴必胜. 复杂周边环境下深基坑开挖监测与变形特性分析[J]. 中国新技术新产品, 2023, (12): 118-120.
[7]莫道圣, 张银虎, 孙峰枫, 董鑫, 朱锐. 超深风井基坑结构变形行为的监测研究[J]. 江苏建筑, 2023, (02): 123-126+139.
[8]万晶, 樊冬冬, 刘天任, 谭勇. 富水砂性地层地铁深基坑监测及变形分析[J]. 建筑结构, 2023, 53 (12): 138-143.
[9]李长作, 燕东源, 郝海龙, 王攀, 刘涛. 基于无人机摄影技术的露天煤矿深基坑变形实时监测研究[J]. 能源与环保, 2023, 45 (03): 257-262.
[10]张子辰, 严长江, 李旺. 某黄土深基坑复合土钉墙变形监测分析[J]. 兰州工业学院学报, 2023, 30 (01): 27-31.

 京公网安备 11011302003690号
京公网安备 11011302003690号


