



- 收藏
- 加入书签

基于色彩识别的含柔性夹爪的串联机械臂移动控制方法
 打开文本图片集
打开文本图片集



摘 要:串联机械臂广泛应用于工业自动化领域,然而传统的刚性夹爪在处理易碎或异形物品时面临一定挑战。本文介绍了一种基于Arduino平台的四自由度串联机械臂,配备柔性夹爪,利用3D打印技术制造,轻量高效,集成了色彩识别模块并可通过Android平台远程控制。通过引入柔性夹爪,该机械臂能够自适应抓取不同形状的物品,适用于制造业中的精密作业。本文详细描述了机械臂的硬件设计、控制系统、以及实验验证,表明该系统具有良好的灵活性和适应性。
关键词:串联机械臂;柔性夹爪;Arduino;色彩识别
Abstract: Serial robotic arms are widely used in industrial automation. However, traditional rigid grippers face challenges when handling fragile or irregularly shaped objects. This paper presents a four-degree-of-freedom serial robotic arm based on the Arduino platform, equipped with a flexible gripper. The gripper is lightweight and efficient, manufactured using 3D printing technology, and integrates a color recognition module. It can be remotely controlled via an Android platform. By incorporating the flexible gripper, the robotic arm can adaptively grasp objects of various shapes, making it suitable for precise operations in manufacturing. This paper provides a detailed description of the robotic arm's hardware design, control system, and experimental validation, demonstrating the system's flexibility and adaptability.
Keywords: Serial Robotic Arm; Flexible Gripper; Arduino; Color recognition
随着科技和工业智能化的迅速发展,机械臂的应用优势愈加显著,越来越多的企业开始采纳机械臂以提升生产效率和产品质量,我国机械臂产业正迎来前所未有的发展机遇。串联式机械臂,通常由一系列相互连接的零件组成,能够在X、Y、Z轴上进行线性运动,从而实现物体的抓取和移动[1];这种机械臂广泛应用于制造业中的自动化加工、组装、搬运和检测等环节,有效提升生产效率和工作质量。然而,传统的串联式机械臂面临速度慢、控制复杂和适应性不足的问题,尤其在处理小体积或脆弱物品时效果不佳。柔性夹爪具有较好的适应性和灵活性,能够适应各种形状和材质的物体,且在夹持过程中对物体施加的应力更加均匀,有助于保护物体表面。因此,含柔性夹爪的机械臂在处理不规则形状、脆弱物品、变形物体等方面具有明显优势。
国外的相关研究主要集中于柔性夹爪设计优化、控制算法开发以及实际应用验证,俄罗斯国家机器人研究所Damaševičius R教授等[2]在最新研究中,提出一个创新的机器人平台与ABB高精度工业机械臂,对机器人进行编程,以实现3000个周期的研磨,用于分析牙科粘合材料的稳定性和热磨损,解决机器人轨迹规划的问题,以实现平滑和精确的轨迹,同时最小化冲击;Hairui Liu,Yu Wang[3](2019)研究根据结构各部分的重要性,对上肢康复机器人的结构进行不同方式的简化,选取不同的单元类型并建立有限元模型,根据其分析结果去掉一些不必要的零部件并进行简化,通过定义参数对主要受力部件进行优化,对结构进行优化再设计。
在国内,学术界和产业界也开始关注含柔性夹爪的机械臂技术,并在该领域展开一系列研究工作。一些研究机构和高校开展了柔性夹爪相关的研究项目,探索含柔性夹爪机械臂在工业制造中的应用潜力。马威等[4](2022)研究针对目前柔性夹爪手指弯曲扰度大,指尖接触性能差,难以实现四角粽指尖性抓取的问题,设计了一种增强指尖型柔性夹爪,并采用3D打印和浇铸成型技术制作柔性手指及其固定组件,通过实验,证明了该柔性夹爪结构简单且抓取成功率高,在机械手自动化分拣、包装粽子方面具有应用价值;陈璇等[5](2022)研究提出一种基于多机器人运动控制的断路器柔性自动化车间装配方案,实验结果证明,所提方案对实现断路器柔性装配有显著效果。
未来的研究趋势表明,含柔性夹爪的机械臂将在工业自动化领域有着广阔的应用前景。本文介绍了一种基于Arduino平台设计的四自由度串联机械臂,该机械臂配备了柔性夹爪,并使用3D打印技术制造,以确保轻量、耐用和高效,本设计还集成了色彩识别模块,使机械臂能够智能化操作,提升了操作效率和准确性。色彩识别模块允许机械臂自主识别和定位目标物体,在复杂环境中迅速响应,提高了灵活性,能够处理各种颜色、形状和大小的物品,为自动化生产提供了更多应用可能性。此外,为了便于操作,基于Android平台开发了串联机械臂的移动控制系统,操作人员可以通过手机或平板电脑实现远程控制和监控,进一步简化操作过程。在深入研究含柔性夹爪的串联机械臂时,重点探讨其机械结构设计,包括夹爪材料选择、关节灵活性和整体刚度优化。同时,开发相关控制算法,以提升夹持精度和多样物品适应性。这些关键设计元素共同构建出一种创新性的机械臂系统,使其在复杂工业环境中高效处理柔软和脆弱物品,确保任务的可靠完成。
1 硬件结构设计
本项目基于Arduino平台,采用了四自由度的串联机械臂结构。机械臂由多个伺服电机驱动,其关节通过编码器进行闭环反馈控制,实现高精度的运动。柔性夹爪,能够自适应不同形状的物体,且搭载了真空泵等辅助设备,确保机械臂在工作时具备精准的路径感知和障碍规避能力,搭配色彩识别模块,进一步提升系统的操作稳定性。
1.1 机械臂结构设计
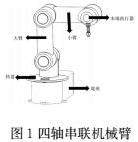
本项目旨在重点研究一种带有柔性夹爪的四轴串联机械臂的设计与实现。首先,将对串联机械臂的结构和工作原理进行详尽阐述,机械臂具体结构设计如图1所示,该机械臂具有四轴,末端设计为柔性夹爪
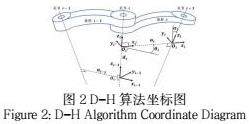
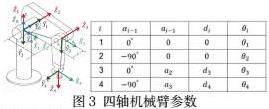
串联机械臂的结构设计关键,影响其性能和功能。设计时要考虑连杆、关节、基座和末端执行器,优化整体结构,提升性能和效率。机械臂末端柔性夹爪的位置和姿态通过D-H算法计算,涉及连杆角度、偏距、长度和转角参数,通过齐次变换矩阵公式描述正逆运动学,确保机械臂的高效、可靠运行。如图2为D-H算法坐标图。
step1:沿Zi-1轴移动di;
step2:绕Zi-1轴转动θi;
step3:沿Xi轴移动ai;
step4:绕Xi轴转动αi。
通过以上四步对四轴机械臂建立坐标系,并根据关节运动原理,可得各关节参数,具体如图3所示。
1.2硬件设计和电源设计
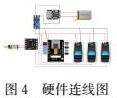
硬件设计和电源设计是确保其正常运作的两个关键部分。在硬件设计上,ESP8266作为主控计算单元,不仅提供了足够的计算能力,还具备了丰富的接口和网络通信功能,对于机械臂的智能控制尤为必要。通过四路直流舵机,能够精确控制每个连杆的角度,从而实现精细的操作;此外,555直流真空泵的使用,使得柔性夹爪的开合得到有效控制,而螺纹接口的设计则方便了不同型号夹爪的快速更换。
具体硬件连线如图4所示。
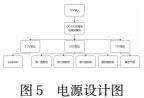
在电源设计方面,需要确定机械臂的总功率需求,这包括了舵机、主控板以及其他附属设备如真空气泵的功率需求。根据这些需求,选择了适当的电压等级,并设计了DC-DC多路电压转换模块,以确保各个部件都能获得适宜的电压供应,电源设计方案如图5所示。
1.3 柔性夹持器
使用柔性材料,能够自适应抓取不同形状和大小的物体,确保抓取过程中的安全性。通过对控制器配件的远程控制,可无线管理爪子张开和闭合的速度,简化调试过程,方便快捷地进行调整,本文所设计的柔性夹爪如图6所示。
1.4 色彩识别模块
OpenMV是一个基于Python的开源计算机视觉平台[6],专为嵌入式系统设计,能够在低功耗硬件上运行,支持实时图像处理和视觉任务,广泛应用于自动化和智能监控等领域。
串联机械臂色彩识别模块是机械臂系统中的智能装置,用于获取和识别目标物体颜色信息,实现智能化操作。工作原理是将采集的颜色信息与预设范围匹配,指导机械臂执行动作,如抓取和分类。这一模块提升了机械臂的效率和准确性,使其能适应更复杂的工作环境。如图7为机械臂色彩识别模块。
2 算法控制
机械臂的操作通过嵌入式算法实现,支持路径规划和动作控制。色彩识别模块基于OpenMV平台,通过Python脚本处理图像数据,并识别目标物体的颜色,从而实现智能抓取和分类功能。移动端控制系统则基于Android开发,用户可通过手机与ESP8266模块进行实时通信,远程控制机械臂的操作。整个系统通过软硬件的结合,实现精准、灵活的自动化操作,支持多种复杂工作场景下的应用。
2.1 机械臂程序设计
机械臂利用Arduino的开发环境进行编程,它提供了底层设备控制,常用函数的实现,进程间信息传递以及所需的工具和库函数[7]。舵机的控制信号为周期20ms的PWM信号,其中脉冲宽度从0.5mm到2.5mm,对应舵机位置0到180度,即只要主板提供一定的信号,舵机即可保持一个角度。
2.2 色彩识别控制设计
首先初始化了摄像头,然后设置了要识别的颜色阈值(红色),在每次循环中,程序捕获一张图像,然后使用预先设定的颜色阈值进行色彩识别,若找到目标物体,程序会在图像上标记出目标的位置,并在控制台输出其坐标。最后,将图像显示在连接了OpenMV的LCD屏幕上,具体代码实现如下所示:
import sensor, image, time# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000) # 等待摄像头稳定
# 配置颜色阈值(在此示例中为红色)
red_threshold = (30, 100, 15, 127, 15, 127) # 对应 (L Min, L Max, A Min, A Max, B Min, B Max)
# 开始捕获图像并执行色彩识别
while True:
img = sensor.snapshot() # 拍摄一张图像
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200)
if blobs:
# 找到了目标物体,标记它的位置
for blob in blobs:
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
print("目标物体位置:X: %d, Y: %d" % (blob.cx(), blob.cy()))
# 将图像显示在LCD屏幕上
img.compress(quality=35) # 压缩图像以加快显示速度
img = img.resize(160, 120) # 缩小图像尺寸以适应LCD屏幕
img.compress(quality=35) # 再次压缩图像
img.draw_string(0, 0, "Color Detection", color=(255,255,255), scale=2)
lcd.display(img) # 在LCD屏幕上显示图像
图8为显示屏上输出的色彩识别结果
2.3 移动控制设计
移动控制系统与串联式机械臂系统之间的通信是实现远程操控的核心。该系统的架构设计旨在实现高效、稳定的通信,并确保用户友好性和安全性,通过直观的用户界面,以提供控制机械臂的各项功能,其中的控制界面包括控制按钮、滑动条,用于发送不同类型的控制命令。通过ESP8266作为主控板,可以实现移动控制机械臂各个舵机的运动。首先,需要确保ESP8266连接到Wi-Fi网络,并能够与移动端建立通信;然后,在ESP8266上编写代码,建立与移动端的通信通道,接收来自移动端的控制指令并解析执行,具体来说:当使用ESP8266建立与移动端的通信通道时,通常会使用Wi-Fi连接和TCP/IP协议。
同时,编写一个手机应用程序,通过界面元素如滑块或按钮,将用户操作转换为控制指令,并通过Wi-Fi发送给ESP8266,在ESP8266收到指令后,通过PWM输出信号控制舵机的位置,实现机械臂的运动。最后,进行反馈和调试,确保通信稳定可靠,舵机运动准确无误。具体界面设计如图9所示,这种手机控制机械臂的方式,使得操控更加便捷直观,让用户能够通过手机轻松掌控机械臂的运动。
3实验验证
柔性夹爪与串联机械臂的制造与装配是系统正常运行和性能发挥的关键环节,首先,制造工艺和材料的选择至关重要。对于柔性夹爪,采用3D打印和注塑成型等工艺,确保夹爪具备足够的柔软性和适应性。而对于串联机械臂的刚性部件,3D打印技术则因其高精度和灵活性成为首选,在材料选择上,夹爪部件需采用柔软的弹性材料或硅胶材料,以提供卓越的抓取性能和安全性。而对于机械臂的刚性部件,高强度材料PLA-CF则是确保结构稳定性和负载能力的理想选择。
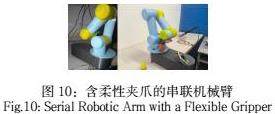
为了模拟实际工作场景,搭建了包含工作平台、控制系统、传感器和被抓取物体等关键组件的实验装置,实时捕获并记录实验过程中的各项数据,如机械臂的关节角度、夹爪的力度以及运动速度等参数,以便进行更深入的分析,具体如图10所示。
4结束语
本研究设计并实现了一种基于Arduino平台的含柔性夹爪的串联机械臂,解决了传统机械臂在处理不规则或脆弱物品时的局限。柔性夹爪通过自适应抓取各种形状和材质的物体,有效提升了机械臂在工业自动化中的应用灵活性,实验验证了系统在抓取任务中的稳定性和精准度,尤其是在色彩识别与远程控制功能的集成下,系统能够高效地完成复杂的抓取操作,展示了良好的工业应用潜力。未来的研究可通过优化控制算法、提升抓取精度与负载能力,进一步增强系统的智能化水平,使其在自动化生产、智能仓储等领域展现更广阔的应用前景。
参考文献:
[1]孙艳.自动化机械臂的结构设计[J].现代制造技术与装备,2022,58(07):180-182.
[2] Damaševičius R,Maskeliūnas R,Narvydas G,et al.Intelligent automation of dental material analysis using robotic arm with Jerk optimized trajectory[J].Journal of Ambient Intelligence and Humanized Computing,2020,(prepublish):1-12.
[3] Liu H,Wang Y.Optimization Design of Support Arm of an Upper Limb Rehabilitation Robot[J].IOP Conference Series: Materials Science and Engineering,2019,688(3): 52-56.
[4] 马威,刘新宇,金炜等.四角粽柔性夹持结构设计与抓取试验研究[J].包装与食品机械,2022,40(03):44-50.
[5] 陈璇,舒亮,冷玉祥,等.断路器柔性装配车间数字孪生系统设计[J].计算机工程与应用,2022,58(14):245-257.
[6] 王恒,尚明明,石宝玉等.基于Robotic的五轴串联机械臂轨迹规划[J].唐山师范学院学报,2022,44(06):51-55.
[7] 苗浩原,朱笑笑,周章勇,等.基于协作机械臂的航电开关柔性检测算法[J].南京航空航天大学学报,2022,54(01):17-26..
作者简介:
谢凡:男,2004.04,学士,主要研究方向:人工智能、机器人技术研究
马欣冉:女,2004.05,学士,主要研究方向:图像识别、软件开发

 京公网安备 11011302003690号
京公网安备 11011302003690号


