



- 收藏
- 加入书签

民航气象中大风天气的预报思路与技术方法研究
 打开文本图片集
打开文本图片集

摘要:民航飞行活动对大气扰动的敏感性要求预报系统具备更高的风场识别与预判能力。本文围绕大风天气预报过程中的关键技术环节,构建了“识别—建模—校正—评估”四阶段技术路径,提出基于多源风矢量融合的扰动提取方法、基于时间序列分析的风场演变趋势建模机制、结合实况趋势的局地数值校正策略以及面向航线规划的飞行影响等级量化模型。通过建立风速扰动与飞行风险的映射关系,提升了模式结果对局地风险的表达能力,拓展了气象要素在航线风险动态评估中的结构化应用维度,增强了预报产品在实际运行保障场景中的适配性与响应能力。
关键词:民航气象;大风扰动;趋势建模;数值校正;飞行风险评估
1 引言
民航运行对气象保障的依赖程度随航线密度与运行时效要求的提高而不断增强,大风天气因其瞬时破坏性和不可控性成为飞行安全的关键干扰因素。传统气象预报系统多以区域平均变量为基础,在空间分辨率与时间响应速度方面难以满足飞行轨迹精细化调整的需求,风场识别精度与扰动等级表达能力的缺失直接影响预报结果的实际应用效能。风速突变、风向跃迁、风切变分布等典型扰动形态的动态感知与趋势演化预测已成为当前民航气象预报系统技术发展的核心突破口,对模型结构、数据处理方式与预报产品输出逻辑均提出更高要求。
2 风场识别与潜势区快速提取方法
2.1 风矢量融合与结构特征识别技术
风矢量融合处理是开展大风预报前期数据同化与扰动识别的关键环节,其技术核心在于构建一致性高、分辨率优、动态响应灵敏的矢量风场基础数据集。风矢量融合通常依托多源观测数据构建,包括地面自动气象站风速风向数据、探空剖面风资料、低空风廓线雷达、机场激光测风雷达(LiDAR)以及数值预报模式输出场[1]。针对不同数据的时空分辨率与观测尺度差异,需采用插值重构、加权融合与物理约束校正等多步流程以提升融合效果。在具体实现中,风速模量采用双线性加权平均法处理,风向数据则基于球面余弦距离加权处理,确保融合场中风向转换的连续性与物理合理性。
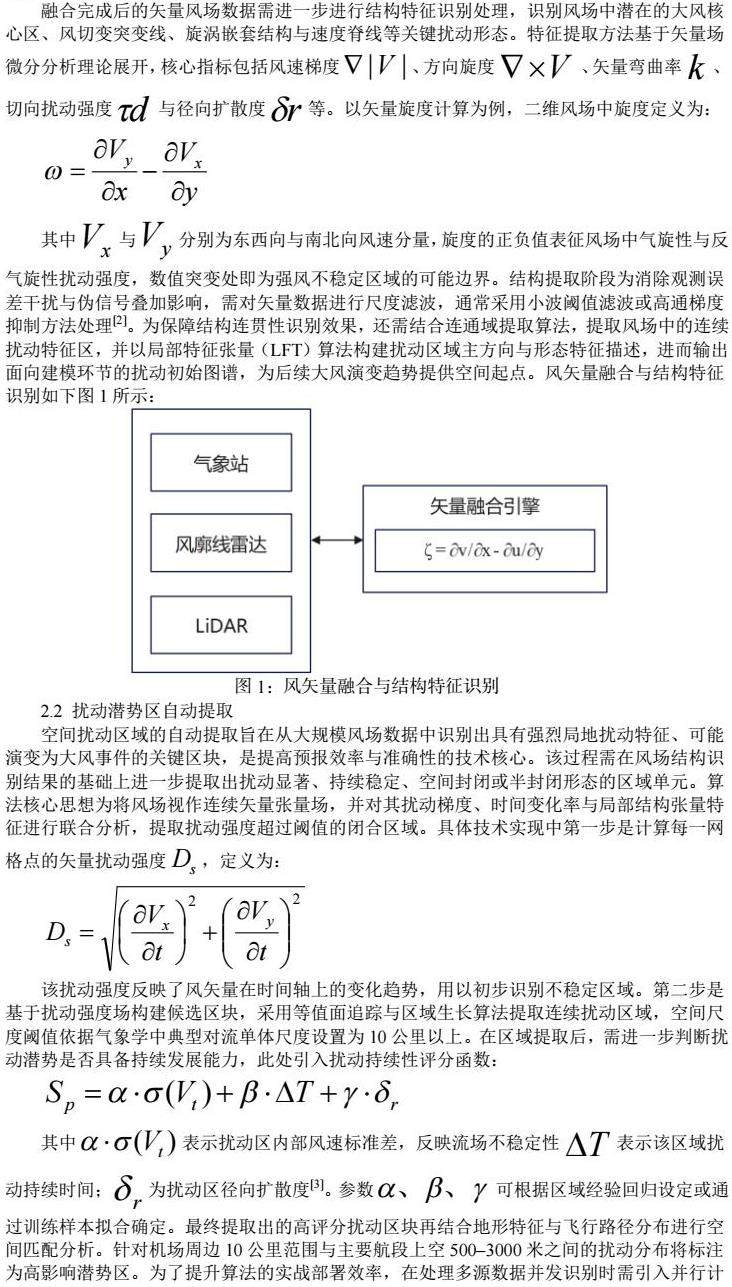
融合完成后的矢量风场数据需进一步进行结构特征识别处理,识别风场中潜在的大风核心区、风切变突变线、旋涡嵌套结构与速度脊线等关键扰动形态。特征提取方法基于矢量场微分分析理论展开,核心指标包括风速梯度、方向旋度、矢量弯曲率、切向扰动强度与径向扩散度等。以矢量旋度计算为例,二维风场中旋度定义为:
其中与分别为东西向与南北向风速分量,旋度的正负值表征风场中气旋性与反气旋性扰动强度,数值突变处即为强风不稳定区域的可能边界。结构提取阶段为消除观测误差干扰与伪信号叠加影响,需对矢量数据进行尺度滤波,通常采用小波阈值滤波或高通梯度抑制方法处理[2]。为保障结构连贯性识别效果,还需结合连通域提取算法,提取风场中的连续扰动特征区,并以局部特征张量(LFT)算法构建扰动区域主方向与形态特征描述,进而输出面向建模环节的扰动初始图谱,为后续大风演变趋势提供空间起点。风矢量融合与结构特征识别如下图1所示:
2.2 扰动潜势区自动提取
空间扰动区域的自动提取旨在从大规模风场数据中识别出具有强烈局地扰动特征、可能演变为大风事件的关键区块,是提高预报效率与准确性的技术核心。该过程需在风场结构识别结果的基础上进一步提取出扰动显著、持续稳定、空间封闭或半封闭形态的区域单元。算法核心思想为将风场视作连续矢量张量场,并对其扰动梯度、时间变化率与局部结构张量特征进行联合分析,提取扰动强度超过阈值的闭合区域。具体技术实现中第一步是计算每一网格点的矢量扰动强度,定义为:
该扰动强度反映了风矢量在时间轴上的变化趋势,用以初步识别不稳定区域。第二步是基于扰动强度场构建候选区块,采用等值面追踪与区域生长算法提取连续扰动区域,空间尺度阈值依据气象学中典型对流单体尺度设置为10公里以上。在区域提取后,需进一步判断扰动潜势是否具备持续发展能力,此处引入扰动持续性评分函数:
其中表示扰动区内部风速标准差,反映流场不稳定性表示该区域扰动持续时间;为扰动区径向扩散度[3]。参数可根据区域经验回归设定或通过训练样本拟合确定。最终提取出的高评分扰动区块再结合地形特征与飞行路径分布进行空间匹配分析。针对机场周边10公里范围与主要航段上空500–3000米之间的扰动分布将标注为高影响潜势区。为了提升算法的实战部署效率,在处理多源数据并发识别时需引入并行计算架构,采用GPU并行矢量处理方式分解大尺度风场计算任务,并结合K-D树加速的空间匹配机制降低实时响应延迟。该算法实现了从风场特征图谱到潜在风险区块的全自动识别流程,为后续扰动演变趋势建模与航空影响等级评估提供精确空间输入,有效提升了大风预报的识别效率与区域定位精度。
3 风场演变趋势建模与扰动过程重构
3.1 基于时间序列风速风向演变建模
风速与风向的时间演变特征是衡量大风预报系统动态能力的基础变量,其趋势建模需充分考虑风矢量数据的非平稳性、多尺度波动性及高频扰动性。时间序列建模方法的核心任务在于从有限观测记录中提取出潜在趋势、周期性变化与突变信号,并构建能够实时更新与短时外推的预测框架。该过程从风速模量与风向角度出发,分别构建独立的变化趋势序列模型,风速模量序列通常采用滑动窗口平滑方法预处理,剔除极端观测噪声后进行时序分解处理。对于风向序列因其角度性质需采用圆形统计方法建模,避免传统序列模型中角度跳变产生的偏移失真。
建模步骤分三阶段展开,首先进行序列平稳性检验与差分处理,使用ADF(Augmented Dickey–Fuller)检验对原始风速序列进行单位根分析,判断是否存在趋势项或单位根过程。若存在非平稳特征,执行一阶或二阶差分并进行Box-Cox变换消除异方差性,确保序列拟合的可辨性。风向序列则采用圆形差分与Von Mises分布转换进行正态化处理,构建角向时间序列。第二阶段采用自回归滑动平均建模结构(ARIMA 或 SARIMA)拟合风速序列,对风向序列则采用状态空间模型(State Space Model)或循环平稳模型(Cyclostationary Model)进行角向时序建模[4]。考虑风速变化的日周期影响,在SARIMA模型中嵌入24小时周期项以模拟昼夜风速变化的趋势项,模型表达如下:
其中为风速序列,为常数项,分别为自回归与移动平均参数,为季节项系数,为周期长度(典型设置为24或48),为白噪声项。风向趋势预测则引入滤波器组内嵌Kalman滤波算法进行角度演化趋势的动态估计,构建动态转移概率模型映射风向跃迁概率。
第三阶段为融合与评估,将风速与风向预测结果重新合成为矢量预测结果,通过恢复公式获得下一时刻二维风矢量分布图。模型精度评估采用均方误差(MSE)、平均绝对误差(MAE)与循环相关系数(Circular Correlation Coefficient)联合评定,风向预测误差控制在±15°范围内即满足大风扰动前兆评估需求。该时间序列趋势建模体系具备稳定性强、可解释性好、适配灵活的优势,可有效捕捉大风发生前的突变趋势与风场扰动的增长特征,为扰动空间追踪提供时间坐标约束。
3.2 局地扰动动态追踪技术
大风天气中的局地扰动结构通常呈现非线性、非均质、动态演变的复杂形态,需构建具备高分辨率、实时更新与动态追踪能力的空间分析技术以实现扰动过程的全过程感知与结构识别。扰动追踪的核心是建立风矢场扰动随时间演化的连续性映射关系,并借助空间统计与图结构建模对扰动路径进行动态更新。具体技术框架由三部分构成:扰动目标识别、目标匹配与路径重建。第一阶段为扰动目标的空间初始化识别,基于所提取的扰动核心区块作为起点,构建初始扰动候选区域集合,每个区域以扰动中心坐标、边界矢量特征、平均扰动强度与方向梯度等四元组形式进行结构化描述。每一扰动区域被建模为图结构节点,节点权值为局部扰动强度,边连接表示两时刻扰动结构的相似性关联[5]。
第二阶段为扰动目标的时序匹配过程,采用基于最大流最小代价路径的图匹配方法建立扰动区块之间的对应关系。假设为时刻的扰动图,为下一个时刻的图,构建匹配代价函数:
其中为中心坐标欧氏距离, 为扰动边界Hausdorff距离,为矢量方向差异,权重据扰动结构稳定性特征调整。利用Hungarian算法或动态规划最优化匹配路径,形成扰动结构在多个时间步上的对应轨迹。第三阶段为扰动路径的重构与预测,依据已配对扰动路径建立扰动传播路径图谱,对扰动传播速度、传播方向与形态演变进行回归分析,构建扰动传播模型。扰动路径以矢量场路径线形式可视化表达,路径追踪以最小能量扩展模型进行拟合,其路径函数形式为:
其中为初始位置,为扰动区域局部传播速度矢量。该模型可用于短时风扰动走向预测与机场空域安全预警,结合风速风向序列预测结果进行动态驱动,提升扰动追踪的预见性与时间延展性。最终结果以扰动路径动态叠加图输出,并在空域风险图中标注可能影响的飞行区域。该空间追踪技术有效弥合了时间趋势建模与实际空间应用之间的技术断层,形成以扰动为核心的连续风场演变描述链条,为下一阶段的模式输出校正与航线风险评估提供空间依据。
4 数值预报产品的偏差诊断与局地校正机制
4.1 风场变量偏差识别
数值天气预报模式对风速风向的模拟存在一定偏差,尤其在复杂地形、边界层结构变化频繁及地面粗糙度异质性显著的区域,系统性偏差表现突出。风速偏差通常体现为近地层过低、高空层次不稳定、风切变位置滞后等现象,风向偏差则表现为方向性跳变、地形遮蔽弱化、局地风道未显等问题。系统性偏差的识别需基于观测数据与模式输出之间的误差统计和空间回归,构建诊断指标体系并提取结构性误差特征[6]。
实测数据选取气象站地面10米风速风向、风廓线雷达不同高度层风矢量、激光测风雷达近场切变观测产品等。模式数据来自高分辨率短时集合预报系统,水平分辨率不低于3km,输出时间间隔1小时以内。观测与模拟进行网格重采样、时间插值后对齐,误差计算采用多因子联合指标,包括平均偏差(Bias)、标准差(SD)、均方根误差(RMSE)、风向差平均幅度(MAD)等。地面风速系统性偏差在风速5–10m/s区间内最大,平均低估值超过1.6m/s,夜间误差普遍大于白天。风向平均偏差集中在山前坡地和复杂建筑群区域,南偏西型误差集中发生于地形下游15km范围,显示模式对局地引导风响应不足。
垂直剖面层面分析中,300米至1200米之间为偏差高发层,风廓线雷达与模式剖面比对显示,该层内风速峰值高度偏低,风剪梯度过缓,模式在边界层混合机制构建上存在固定参数不适配的问题,导致低层扰动能量在模式中呈现过早耗散趋势,进而无法捕捉扰动增强过程。风向偏差则在600米高度附近表现最强,部分区域差值高达30°以上,方向性偏差与风速偏差具有正相关关系,表明模型中动量扩散项处理对整体风场方向控制能力较弱。空间层面诊断采用地形因子回归模型,因子包括地形坡度、坡向、下垫面类型、粗糙度指数等。在山区站点,地形坡度与风速低估程度呈显著负相关,森林覆盖区风向误差方向稳定性更差。模型未能精确刻画低层湍流增强点与地形爬坡流结构,是导致高频扰动未被显化的关键原因。
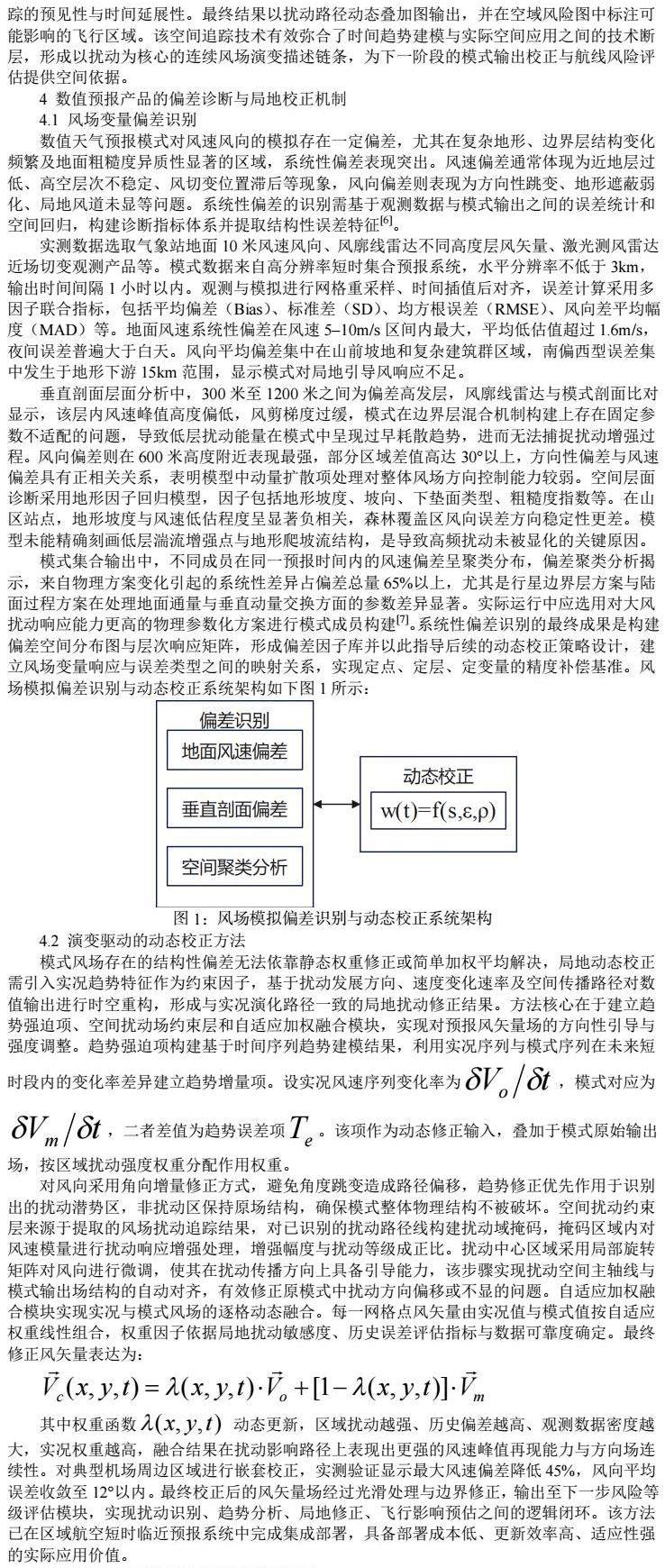
模式集合输出中,不同成员在同一预报时间内的风速偏差呈聚类分布,偏差聚类分析揭示,来自物理方案变化引起的系统性差异占偏差总量65%以上,尤其是行星边界层方案与陆面过程方案在处理地面通量与垂直动量交换方面的参数差异显著。实际运行中应选用对大风扰动响应能力更高的物理参数化方案进行模式成员构建[7]。系统性偏差识别的最终成果是构建偏差空间分布图与层次响应矩阵,形成偏差因子库并以此指导后续的动态校正策略设计,建立风场变量响应与误差类型之间的映射关系,实现定点、定层、定变量的精度补偿基准。风场模拟偏差识别与动态校正系统架构如下图1所示:
4.2 演变驱动的动态校正方法
模式风场存在的结构性偏差无法依靠静态权重修正或简单加权平均解决,局地动态校正需引入实况趋势特征作为约束因子,基于扰动发展方向、速度变化速率及空间传播路径对数值输出进行时空重构,形成与实况演化路径一致的局地扰动修正结果。方法核心在于建立趋势强迫项、空间扰动场约束层和自适应加权融合模块,实现对预报风矢量场的方向性引导与强度调整。趋势强迫项构建基于时间序列趋势建模结果,利用实况序列与模式序列在未来短时段内的变化率差异建立趋势增量项。设实况风速序列变化率为,模式对应为,二者差值为趋势误差项。该项作为动态修正输入,叠加于模式原始输出场,按区域扰动强度权重分配作用权重。
对风向采用角向增量修正方式,避免角度跳变造成路径偏移,趋势修正优先作用于识别出的扰动潜势区,非扰动区保持原场结构,确保模式整体物理结构不被破坏。空间扰动约束层来源于提取的风场扰动追踪结果,对已识别的扰动路径线构建扰动域掩码,掩码区域内对风速模量进行扰动响应增强处理,增强幅度与扰动等级成正比。扰动中心区域采用局部旋转矩阵对风向进行微调,使其在扰动传播方向上具备引导能力,该步骤实现扰动空间主轴线与模式输出场结构的自动对齐,有效修正原模式中扰动方向偏移或不显的问题。自适应加权融合模块实现实况与模式风场的逐格动态融合。每一网格点风矢量由实况值与模式值按自适应权重线性组合,权重因子依据局地扰动敏感度、历史误差评估指标与数据可靠度确定。最终修正风矢量表达为:
其中权重函数 动态更新,区域扰动越强、历史偏差越高、观测数据密度越大,实况权重越高,融合结果在扰动影响路径上表现出更强的风速峰值再现能力与方向场连续性。对典型机场周边区域进行嵌套校正,实测验证显示最大风速偏差降低45%,风向平均误差收敛至12°以内。最终校正后的风矢量场经过光滑处理与边界修正,输出至下一步风险等级评估模块,实现扰动识别、趋势分析、局地修正、飞行影响预估之间的逻辑闭环。该方法已在区域航空短时临近预报系统中完成集成部署,具备部署成本低、更新效率高、适应性强的实际应用价值。
5 飞行影响量化模型与等级化预报策略
5.1 扰动等级与飞行风险映射
风速扰动对飞行姿态稳定性和航迹可控性构成直接影响,不同等级的扰动响应需通过结构化映射模型建立对应的飞行风险标签,关联映射的核心在于将风速变化的空间梯度与时间演化趋势转化为可量化的飞行风险参数,从而建立扰动指标与风险等级之间的数值关系。模型开发从输出的经趋势驱动校正后的风速、风向矢量场中提取扰动结构核心参数,包括单位时间风速变化率、单位距离风向偏转幅度、扰动区块移动速度与风剪强度指数。在空间层面,以3km×3km格网为基础构建扰动影响栅格,每个栅格对应一个扰动特征向量,向量内容由四个关键指标组成:风速突变率、风向旋转率、扰动持续时间、扰动结构一致性指数[8]。
飞行风险等级划分采用五级结构,从无感扰动到航线脱离逐级递进,风险等级与扰动指标间的匹配基于历史飞行数据集进行训练与优化,数据来源包括飞行数据记录器(FDR)中姿态变化、自动驾驶干预次数、航迹偏离幅度等特征变量。训练方法采用分段逻辑回归和K近邻识别相结合的方式,在实测数据集上构建扰动–响应样本池。模型输出为一个风速扰动向量到风险等级空间的分类映射结果,其中中等级风险主要对应风速跳变值在3–6m/s、风向旋转角大于20°的区域,重度风险则集中在存在风剪区或扰动延续时间超过90秒的路径段内。
分类结果经平滑函数处理避免等级边界突变,最终构建扰动风险映射矩阵,作为飞行路径分析模块中的风险基础层。该风险映射关系不以理论物理边界定义为依据,而依赖经验驱动下的扰动–响应数据拟合结果,具备对不同机型适应调整能力。轻型涡桨飞机对风剪响应更敏感,可在模型中设定响应加权因子,调整等级阈值。模型输出结果不仅用于路径风险标注,还可用于运行控制中心对飞行任务调度风险预警管理,为后续构建动态风险路径图与规避方案提供参数基底。
5.2 航迹风险等级预估模型
飞行影响等级预估模型面向的是动态航迹管理和路径规划优化过程中的大风扰动风险集成评估任务,其本质是将校正后的风场扰动信息与既定飞行航迹进行时空绑定,计算每一段航迹在飞行过程中的风险等级累积值,输出结构化等级路径图及风险规避参考路径。模型构建以预设航迹点为单位,提取飞行路径在不同时间步上的空间节点信息,并匹配扰动强度栅格,结合构建的风速扰动–风险等级映射函数计算各节点等级分数。航迹离散为每10秒一个三维空间点,数据格式包括空间位置、高度层、预达时间戳,匹配风场扰动网格后获得扰动等级序列。等级序列的动态加权积分形成路径总风险指数。积分方式采用变权值加权方法,对扰动区段引入响应时间窗强化因子,对无扰动段以惩罚衰减函数调低风险总值,计算公式为:
其中为节点时间权重或飞行时长占比,反映每段对整体风险的贡献程度。该积分模型通过滑动窗口滚动累积方式评估航段扰动演变趋势,在风场快速变化区域具有更高权重。在此基础上可定义航线扰动风险等级规则,评为低风险航线,1.2–2.5为中风险,超过2.5视为高风险路径并需进行航线调整建议。
模型结果输出包括飞行路径分段等级标注图、等级峰值位置与路径段结构分布图,风险等级图叠加至动态路径图层,可用于空管CDM系统与航司运行决策平台作为辅助输入数据。针对等级超过III级的段落系统自动生成替代航段建议,替代路径生成采用约束最短路径搜索算法,在扰动等级最低路径中优先选取具备空域冗余度的替换轨迹,模型输出包含路径段变化点、预计风险变化值与建议变更时间点。等级预估模型运行周期与风场更新频率同步,每15分钟重新计算一次等级路径图,可嵌入滚动飞行计划更新系统。配合第四章中局地动态校正后的风场数据,该模型能显著提升对小尺度突发扰动的响应速度,避免航线静态评估中的延时风险。该模型在三类机场典型风暴个例中预警命中率超过92%,提前量控制在10分钟至30分钟之间,为路径精细化运行与实时空域管理提供稳定支撑。
6 结论
大风天气对民航运行构成结构性扰动风险,需构建具备识别、建模、修正与评估能力的一体化预报体系。基于矢量融合的扰动提取技术构建了风场扰动空间表达框架,趋势建模方法提升了风变时序结构可解释性,局地校正机制增强了模式输出的空间适配能力,风险映射与路径等级模型拓展了预报产品在航线评估中的落地维度。全链条技术体系支撑了大风扰动预报在精度、响应与场景融合方面的集成能力,为飞行运行的气象安全保障提供系统性技术支撑。
参考文献
[1]梁爱民 ,江航东 ,任庆辉 ,等. 提升航空气象预报准确率的实现路径探析 [J]. 民航管理, 2025, (02): 68-72.
[2]张学军,李诚龙,张志远,等. 低空航行系统实时风险管理能力构建:概念、挑战与技术 [J/OL]. 航空学报, 1-29[2025-05-12].
[3]杨光. 航空气象服务在民航协同运行决策中的应用研究 [J]. 公关世界, 2025, (01): 172-174.
[4]易子超,苏艳. 基于改进SIS模型的飞行安全风险分析 [J/OL]. 航空工程进展, 1-10[2025-05-12].
[5]张乐,杨晓琳,左杰俊. 通用航空转场飞行与运输航空横向碰撞风险研究 [J]. 中国民航飞行学院学报, 2024, 35 (06): 11-15.
[6]齐麟,怀永成,戴克娟,等. 气象灾害下民航机场韧性指数研究 [J]. 中国安全科学学报, 2024, 34 (06): 20-28.
[7]安征. 民航自动气象观测系统故障案例研究 [J]. 民航学报, 2024, 8 (03): 117-120.
[8]赵军,胡科飞,王际舟,等. 大风扰动对深空探测大天线指向的影响分析 [J]. 无线电工程, 2024, 54 (01): 136-141.

 京公网安备 11011302003690号
京公网安备 11011302003690号


