



- 收藏
- 加入书签

智能化多功能应急救援机器人设计与研发
摘要:本文研发的智能化应急救援机器人,以三大核心技术体系构建功能框架:其一为集成高精度 IMU 的智能四驱行走机构,可适配泥泞、陡坡等复杂地形;其二为融合传感器与深度学习的自适应破障系统,支持剪切钳、钻孔器 等模块快速拆卸更换;其三为高效灭火涵道系统,能根据火灾场景精准调节灭火参数(如水雾喷射距离、干粉覆盖范围),提升灭火效率。该机器人通过模块化设计实现灭火、搜救功能的快速切换,可适配洪涝、地震等多类灾害场景。 相较于传统人工救援,其预估可显著缩短重特大灾害响应时间,提升搜救效率并降低次生灾害危害,同时推动应急救援装备从 “单功能机械化” 向 “智能化模块化” 转型,为应急事业现代化提供技术支撑。关键词:应急救援;智能机器人;模块化设计;全地形行走;自适应破障
引言
、在全球气候变化与人类活动交织,自然灾害已成制约社会经济可持续发展、威胁人类生命财产安全的关键风险。报告预测,2025 年全球自然灾害数量将较21 世纪初增长37%,其中气候相关灾害(洪水、风暴)占比超70%。IPCC 报告指出,1950 年以来全球复合极端事件显著增加,气候变暖使大气水汽含量上升 7%/% ,直接加剧灾害链风险。我国2024 年自然灾害呈“四灾并发、链式迭生”态势,洪涝、台风、干旱等主要灾害占比超70%,低温冷冻、地震、山体滑坡等次生灾害频发。京津冀强对流引发城市内涝、台风“海葵”滞留渤海湾致沿海灾情叠加、四川筠连山体滑坡及青海门源地震等事件,不仅严重威胁人民生命财产安全,还暴露了城市群防洪韧性不足、山区灾害链预警精度低、极端场景下救援响应能力有限等问题。
图1 2025 年2 月8 日筠连山体滑坡救援场景

鉴于此,本研究聚焦于极端灾害场景下应急救援的核心关键点,开展智能化多功能应急救援机器人的设计与研发。以融合四轮驱动全地形行走技术、自适应破障执行系统、智能化单模块多功能涵道系统为研究内容,构建“模块化、智能化、协同化”救援机器人,来实现能快速切换灭火、搜救、破障等功能的集成机器人,以适配多样化灾害场景优化灭火效果。该研究方向不仅有希望填补当前应急救援装备“单功能机械化”向“智能模块化”进击的关键跳板,更能为灾害救援事业提供有力技术支撑,助力我国在全球应急管理智能化领域占据技术领先地位。
1.智能四驱协同全地形行走机构
1.1 智能四驱系统概述
本机器人以四轮驱动系统为动力中枢,深度融合智能感知与动态调控技术。通过集成里程计、陀螺仪及视觉传感器,实时感知坡度、障碍物分布等地形信息,结合AI 路径规划算法,智能分配前后轴扭矩。当遭遇泥泞、陡坡等复杂路况时,电子控制单元(ECU)自动启动低速四驱模式,通过行星齿轮组实现扭矩放大;搭配扭矩矢量控制系统(TVC),可精准调节每个车轮动力输出,避免打滑陷困。
1.2 四驱系统核心架构与工作机制
四轮驱动是一种通过机械结构将发动机动力分配至车辆全部四个车轮的传动系统,其核心目标在于优化动力输出与地面附着力之间的动态平衡,从而提升车辆在复杂路况下的牵引性能与操控稳定性。从机械原理角度分析,四轮驱动系统的基础架构由发动机动力输出端、分动箱、传动轴、前后差速器以及半轴等核心组件构成。分动箱作为动力分配中枢,通过齿轮组或链条传动将动力分流至前、后传动轴,实现前后轴间的扭矩分配。分动箱内部通常集成高速(2H)、高速四驱(4H)、低速四驱(4L)等多挡位切换功能,其中低速挡通过行星齿轮或次级减速齿轮实现扭矩放大,以适应攀爬或脱困等高负荷工况。
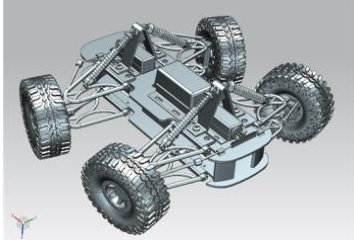
图2 行走机构外观概念图
1.3 附着力管理与扭矩分配技术
前后差速器分别负责调节左右车轮的转速差,确保车辆转弯时内外侧车轮的旋转速度差异得以补偿,避免轮胎滑动磨损。然而,传统开放式差速器存在动力向低附着力车轮流失的缺陷,因此现代四驱系统常引入限滑差速器(LSD)、多片离合器或电子差速锁等装置,通过机械摩擦、液压压力或电控干预限制车轮空转,强制将扭矩传递至高附着力车轮。全时四驱系统进一步增设中央差速器,允许前后轴间存在转速差,同时通过黏性耦合器、托森差速器或主动式电控离合器动态调节前后扭矩分配比例,平衡铺装路面的操控性与非铺装路面的通过性。
2.自适应智能破障执行系统
主动破障机构采用模块化、智能化设计,实现“探测-决策-执行”一体化功能。前端配备压力传感器与高清摄像头,可快速识别障碍物材质、结构及受力点。结合深度学习模型判断破障策略:面对木质、塑料等薄型障碍物,机器人自动加速以楔形铁块冲击破除;遭遇大型砖石、钢筋等坚固障碍时,液压驱动系统在AI 指令下精准调节铲斗角度与提升高度,通过多关节联动完成推挤、破碎、搬运等复合动作。此外,破障模块支持快速拆卸更换,可切换为剪切钳、钻孔器等专用工具,适配坍塌建筑破拆、管道疏通等多样化救援场景,显著提升复杂环境下的任务执行效率。
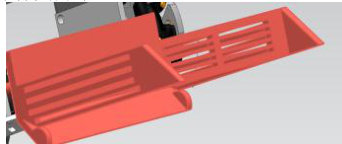
图3 破障机构设计图
3.智能化单模块多功能涵道系统
3.1 智能化多功能应急救援机器人的整体架构
涵道系统并非单纯的功能组件,而是集“高效动力输出-场景适应性增强-灭火效果优化”于一体的多功能技术模块,为复杂应急灭火场景提供精准、可靠的方案支撑,是赋予机器人突破传统救援作业边界的关键单元。3.2 智能化多功能应急救援机器人的逻辑技术该涵道系统通过环形通道对内置动力单元产生的气流进行定向的引导与聚集,一方面显著提升了机器人在复杂救援环境的机动响应速度,确保其快速穿越障碍、抵达火灾核心区域;另一方面,封闭流道结构可实现噪音屏蔽与部件防护双重功能,既降低了风扇运行时的噪音以避免干扰救援通讯,又隔绝了火灾现场小火星及粉尘对动力系统的损害,保障了机器人持续工作的稳定性,同时减少了其运行能耗。
3.3 智能化多功能应急救援机器人的功能扩展协同
涵道系统还可以与其他灭火功能模块形成深度联动——经过流道气体的辅助导流,强化了水雾和干粉的喷射距离与覆盖范围,同时可利用强力气流清除火源周围轻质障碍物,为灭火工作开辟了一条安全通道。该扩展方案使智能化多功能应急救援机器人在室内火情和局部工业火灾等场景中,可以实现“快速响应-安全机动-高效灭火”的一体化作业,加速推动了应急救援机器人向高端化、智能化、多功能化升级。
4.项目创新点
4.1 高度集成的多功能模块化设计
本项目在应急救援机器人的设计上,采用了高度集成的多功能模块化设计思路。这种设计不仅使得机器人能够根据不同救援场景的难度,快速更换功能模块,如灭火、搜救、破障等,还大大提高了装备的灵活性和适应性。通过模块化设计,我们实现了装备功能的快速扩展和升级,满足了应急救援中多样化、复杂化的任务需求。
4.2 基于AI 算法的自主导航与智能避障技术
在自主导航与智能避障方面,本项目引入了先进的AI 算法,如深度学习、计算机视觉等,实现了机器人在复杂环境中的自主导航和智能避障。通过实时感知和分析环境信息,机器人能够自主规划最优路径,避免碰撞,并在遇到障碍物时采取合适的避障策略。这种技术的应用,大大提高了机器人在应急救援中的安全性和效率。
4.3 环保材料与节能技术的融合应用
在应急救援装备的研发中,本项目注重环保材料与节能技术的融合应用。我们采用了可回收、可降解的新型材料,降低了装备的能源消耗和污染物排放。同时,通过优化装备的结构设计和动力系统,提高了装备的耐久性和可维护性,实现了应急救援装备的可持续发展。

图 4 结构框架图五.结论与展望
近年来,国内外应急救援装备领域的研究与技术发展日新月异,特别是在应急救援与智能救援技术的深度融合方面,呈现出快速迭代与多元融合的趋势[4]。展望全球范围内,自然灾害、事故灾难及公共安全事件的发生频率趋高,各国政府越来越开始高度重视应急装备的研发与投入,这不仅推动了市场规模的持续扩张,更促进了应急救援装备向标准化、模块化和实战化的加速演进,推动行业向全链条智能化响应方向加速演进[5]。
从技术层面来看,应急救援装备正以前所未有的速度融入人工智能、物联网、大数据分析等前沿技术[6]。智能感知系统的应用,使得救援人员能够实时监测灾情,快速获取关键信息,从而优化救援流程,提高救援效率[7]。无人机和机器人在应急救援中的广泛运用,更是颠覆了传统的人力救援模式,航空救援装备呈现“高空化+智能化”特征,倾转旋翼无人机搭载的毫米波雷达实现300 公里外山体滑坡预警,救援直升机配备的AI 辅助驾驶系统将复杂气象条件下的起降成功率提升至99.7%,它们能够执行高危任务,如进入危险区域进行侦察、搜救被困人员等,极大地降低了救援人员的风险,同时提升了救援的精准度和安全性[8][9]。此外,应急救援装备的功能也呈现出多功能集成的趋势。兼具通信、医疗、破拆等多种功能的综合救援设备逐渐成为主流,这些设备不仅能够在救援现场提供全方位的支持,还能够根据实际需求进行灵活组合,满足复杂多变的救援需求[10]。在航空救援领域,大型化、快速化和专业化的趋势尤为显著,救生艇、医疗设备及通信装置的规格不断升级,以适应高强度、高难度的救援任务[11]。
与此同时,环保与可持续发展理念在应急救援装备领域也得到了广泛应用。装备材料向可再生与节能型转变,低碳产品市场需求逐步增长,这不仅有助于减少救援过程中的环境污染和资源消耗,还推动了应急救援装备行业的绿色转型[12]。
从市场价值来看,全球应急救援装备行业已进入高速增长期。2024 年中国应急产业规模预计突破2.6 万亿元,同比增长 15.3%(2023 年为2.25 万亿元),其中安防与消防产业占比提升至78%,预计2024-2028 年复合增长率将维持在 12.8%-14.5%[13]。政府投资仍是核心驱动力,各国通过《国家应急体系建设“十四五”规划(2021-2025 年)》等政策强化能力建设。以中国为例,应急管理部基于数字孪生和AI 算法升级的“灾害事故 e 键通”平台,实现警情响应时效缩短至25 秒,较 2022 年提升 56%[14]。
未来,随着技术的持续创新与多场景应用的深化,应急救援与智能救援装备的融合将更加紧密。智能感知、自主导航、远程操控等技术的广泛应用,将进一步提升救援装备的智能化水平,使救援行动更加高效、精准和安全[17]。同时,随着全球应急管理体系的不断完善和应急产业的发展壮大,应急救援装备领域将迎来更加广阔的发展空间和更加美好的发展前景
参考文献
IPCC. 气候变化 2021:自然科学基础 [R]. 日内瓦:政府间气候变化专门委员会,2021.
Access Partnership. 2025 年全球自然灾害预测报告 [R]. 纽约: Access Partnership, 202
国家防灾减灾救灾委员会办公室. 2024 年全国自然灾害基本情况(上半年)[R]. 北京: 应急管理部,2024.
国务院印发《“十四五”国家应急体系规划》[J].中国应急管理,2022,(02):4.
任贵文,温经林,黄全荣,等.多源遥感技术在滑坡灾害应急救援中的应用 [J]. 中国安全生产科学技术, 2022, 18 (S1): 31-36.
工业和信息化部.2024 年应急装备智能化技术发展专项报告[R]. 北京: 工业和信息化部,2024.陈稳舟.移动机器人智能感知技术在应急救援中的应用[J]. 网络与信息安全学报,2017,3(11):79-85.王思敏,孙博. 倾转旋翼无人机在山地救援中的效能分析[J]. 航空学报,2024,45(3):1123-1130.欧洲委员会.欧盟空中救护车技术白皮书 [R/OL]. 布鲁塞尔:欧洲委员会,2021.https://ec.europa.eu/trnsport/sites/transport/files/air_ambulance_white_paper_2021.pdfInternational UAV Association. Drones in Disaster Response: Global Trends andApplications[EB OL]. (2023-06-01)[2024-01-15].https://www.iua.org/reports/disaster-drones.
赵刚,李娜.多功能应急救援装备模块化设计研究[J].机械工程学报,2022,58(8):123-130.
作者简介:郭俊(2004,5-),男,汉族,湖南, 本科生,学生,研究方向:机械立项名称: 2025 年度湖南省大学生创新训练计划一般项目 智能化多功能应急救援机器人立项编号:202511342028

 京公网安备 11011302003690号
京公网安备 11011302003690号


