



- 收藏
- 加入书签

积木赋能:农业机器人基础训练的创新路径与实践探索
摘要:论文聚焦于积木在农业机器人基础训练中的应用,旨在探讨其在提升训练效果、培养学生创新能力和实践操作技能等方面的重要作用。通过对积木在农业机器人基础训练中的应用现状进行分析,阐述了积木在模拟农业场景、搭建机器人模型、培养团队协作等方面的优势。同时,结合实际案例,详细介绍了如何利用积木开展农业机器人基础训练课程。研究结果表明,积木在农业机器人基础训练中具有显著的应用价值,能够有效激发学生对农业机器人领域的兴趣,提高学生的综合素质和创新能力,为农业机器人人才的培养提供了新的思路和方法。关键词:农业机器人基础训练;积木;团队协作 中图分类号:G642
0 引言
随着农业现代化的不断推进,农业机器人在农业生产中的应用越来越广泛。农业机器人能够完成诸如播种、施肥、除草、采摘、饲养等多种农业作业,提高农业生产效率和质量,降低劳动强度。然而,目前农业机器人领域面临着专业人才短缺的问题,如何培养出具有扎实理论基础和实践操作技能的农业机器人专业人才成为了当前亟待解决的问题[1]。
本研究旨在探索积木在农业机器人基础训练中的应用,通过利用积木的趣味性、开放性和可扩展性,激发学生对农业机器人的兴趣,提高学生的实践操作能力和创新能力[2]。同时,为农业机器人基础训练提供一种新的教学方法和手段,丰富教学内容,提高教学效果,为农业机器人专业人才的培养提供有益的参考。
1 积木在农业机器人基础训练中的应用现状
1.1 积木在教育领域的应用
积木作为一种传统的益智玩具,在教育领域已经得到了广泛的应用。它具有简单易学、趣味性强、可扩展性好等特点,能够培养学生的创造力、想象力、动手能力和团队协作能力。在机器人教育中,积木也被广泛应用于机器人的搭建和编程教学中,帮助学生更好地理解机器人的结构和工作原理。
1.2 积木在农业机器人基础训练中的应用现状
目前,积木在农业机器人基础训练中的应用还处于起步阶段。一些高校和科研机构开始尝试将积木引入到农业机器人基础训练课程中,通过搭建积木模型来模拟农业机器人的结构和功能,让学生在实践中学习农业机器人的相关知识和技能。然而,总体来说,积木在农业机器人基础训练中的应用还不够广泛,应用模式和方法还需要进一步探索和完善。
2 积木在农业机器人基础训练中的优势
2.1 模拟农业场景
积木具有丰富的形状和颜色,可以通过组合搭建出各种不同的农业场景,如农田、果园、温室、养殖场等。学生可以在这些模拟的农业场景中进行农业机器人的基础训练,更好地理解农业机器人在实际农业生产中的应用环境和工作要求。
2.2 搭建机器人模型
利用积木可以方便地搭建出各种不同类型的农业机器人模型,如轮式机器人、履带式机器人、飞行机器人等。学生可以通过搭建机器人模型,深入了解农业机器人的结构和组成部分,掌握机器人的搭建技巧和方法。
2.3 培养团队协作能力
在积木搭建和农业机器人基础训练过程中,学生通常需要分组进行合作。通过团队协作,学生可以共同完成机器人模型的搭建和编程任务,培养团队协作精神和沟通能力。
2.4 激发创新能力
积木的开放性和可扩展性为学生提供了广阔的创新空间。学生可以根据自己的想法和创意,对积木进行自由组合和改造,设计出具有独特功能的农业机器人模型,从而激发学生的创新能力。
3 积木在农业机器人基础训练中的应用案例
3.1 课程设计
以河南农业大学的农业机器人基础训练课程为例,该课程将积木引入到教学中,设计了一系列与农业机器人相关的实践项目。课程内容包括积木搭建基础、农业机器人结构与原理、编程基础等。通过理论教学和实践操作相结合的方式,让学生逐步掌握农业机器人的相关知识和技能。
3.2 教学过程
该课程面向农业智能装备工程专业22级大三学生,两个班级共计59人,分成12组。在教学过程中,教师首先向学生介绍积木的基本搭建方法和技巧,然后引导学生根据所学知识搭建出简单的农业机器人模型。
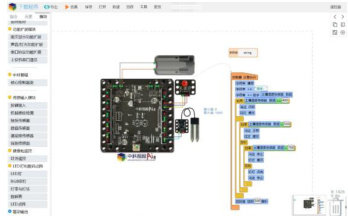
教师向学生讲解农业机器人的编程基础,让学生通过linkboy编程平台采用图形化编程语言编程实现机器人的基本动作和功能。图1所示为linkboy编程平台界面。
图 1 linkboy 编程平台界面
此次基础训练为同学们准备了 15 个实践项目,每组学生可根据自己的兴趣从这些项目中选择一个与其他小组不同的项目来做。在实践项目中,学生分组进行合作。根据给定的任务要求,设计并搭建出具有特定功能的农业机器人模型,并进行编程调试,最终完成任务。下面是其中一个项目的实践过程。
3.2.1 项目介绍
针对中小型养殖场中家禽养殖中环境污染问题,设计一个针对圈舍环境因素实施调控的圈舍环境监测机器人。该机器人通过模块化的硬件与 linkboy 编程平台,构建了圈舍环境调控系统。圈舍环境调控系统依托温光双参数阈值联动风机与保温灯,将圈舍温度波动控制在适宜温度内,同时补光设备在对光照强度低于家禽适宜光照强度时进行及时调节,显著缓解环境对家禽生长的影响。
3.2.2 流程图
学生们通过仔细讨论并做出了相应的项目流程图,如图 2 所示为圈舍环境调控机器人流程图。
图 2 圈舍环境调控机器人流程图
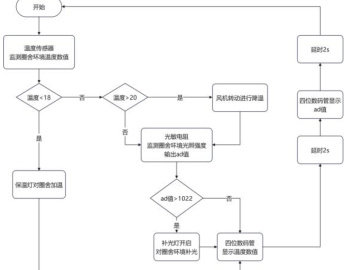
从图 2 中得知,该机器人先对温度进行监测,当温度低于最低阈值时要点亮保温灯对圈舍加温,此过程因为保温灯实际在选型时可以选用补光能力与补光灯相似的型号,这时光照即使低于预定阈值也可以不开启补光灯,用保温灯也足够进行补光了。当温度高于最高温度阈值时,要启动风机降温,此时仍要继续监测光照强度,选择是否开启补光灯,温度在适宜温度内同理要监测光照强度来选择补光灯开启状态。当所有温度和光照使用的调控模块都完成识别及操作后,四位数码管要显示温度数值和光照数值(本模型选用 ad 值)先显示温度数值中间加入两秒演示再显示 ad 值,并在进入下一次循环前也延时两秒以便读取数值。
3.2.3 程序电路接线图
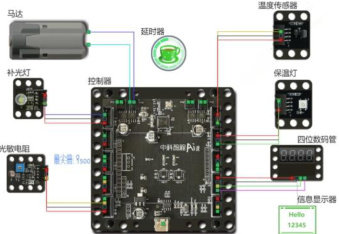
根据硬件选择在工具台模块部分拖拽出模块部分的所需硬件,为了程序与演示硬件名称对应,其中对白灯更名为补光灯,彩灯更名为保温灯。其中对于四位数码管为了让编程语言简洁的表述温度和ad 值的显示,在模块部分的“功能扩展模块”下的“图文显示功能扩展”拖拽出信息显示器这个模块。信息显示器是一种文字显示引擎,针对数字显示可以确定第几行第几列的数字显示,极大简化了四位数码管的显示编程难度。如图 3 所示为圈舍环境调控机器人程序电路图。
图 3 圈舍环境调控机器人程序电路图
3.2.4 程序代码编写
此程序的编写参照图 3 所示的圈舍环境调控机器人流程图,在编程时依旧在控制器初始化中引入马达功率指令,由于模型马达功率对实际参考并无意义,所以仅以风机转动即可,设置马达功率为60W。在温度显示时由于使用的温度传感器数值可以显示到小数点后一位,因此在系统进行温度数据判断时,需要使用小数量对比,因此引入工具台元素部分的“小数量F”。
接下来就是引入条件语句对温度阈值与光照阈值(模型使用 ad 值阈值,但程序中显示为光线强度也就是 ad 值),在补光灯的条件量中除了对 ad 值进行判定,还需要判断保温灯的开启状态, 即保温灯颜色分量为 0 便是按照信息显示器的方式显示温度值和 ad 值中间加入延时器便于读取数值。首先,已知ad 值阈值为 1022 是四位数, 示数字的位置,而温度值做多占用三个,所以当让温度数值在数码管中右对齐,第一个位置不显 码管在设计过程中并没有选择加入小数点指令,这是因为中科智程的四位数码管存在兼 常包括但不限于黑屏或者并不会显示小数点的情况,所以为了避免烧录程序时异常, 如图 4 所示为圈舍环境调控机器人程序代码图。

图4 圈舍环境调控机器人程序代码图
3.2.5 实验验证
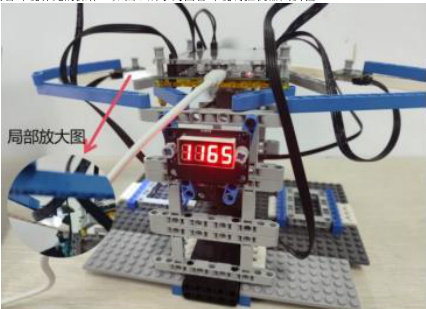
对补光装置的验证,首先室温高于程序温度最高阈值 20℃,虽然室内光照强度高于程序预设阈值,但是可以通过遮盖光敏电阻的方式让光敏电阻的 ad 值大于预定阈值。因此让程序烧录进主板后,遮盖光敏电阻片刻,可以看到 ad 值显示为,白色 LED 灯(补光灯)点亮,成功模拟在保温灯未开启状态对圈舍环境补光的操作。如图5 所示为圈舍环境调控机器人实验。
图 5 圈舍环境调控系统实验
3.3 教学效果评估
通过对学生的学习成果和反馈进行评估,发现学生对该课程的满意度较高。学生在课程学习过程中,不仅掌握了农业机器人的相关知识和技能,还提高了自己的实践操作能力、团队协作能力和创新能力。同时,学生对农业机器人领域的兴趣也得到了有效激发,为今后进一步学习和研究农业机器人打下了坚实的基础。
4 积木赋能农业机器人基础训练教学方法创新的优化对策
4.1 强化创新意识
在农业机器人基础训练中,创新意识的培养是突破传统技能传授模式的核心。当前教学中普遍存在"重操作、轻思维"的问题,导致学生只会机械模仿而缺乏创新。结合积木式教学的模块化特性,可以从三方面构建创新培养体系:一是采用"问题导向、模块重组、功能迭代"的教学方法,结合农业生产实际需求(如作物播种、田间管理、作物收获等),引导学生通过积木模块的不同组合,设计出相应的解决方案;二是推行奖励政策,将学生参与农业机器人创新设计竞赛、专利申请等成果纳入学生奖励考核体系;三是搭建校企协同创新平台,与农业装备制造企业合作,共建"创新中心",将企业中真实的研发项目作为教学案例,使学生创新成果能够直接对接企业需求。
4.2 坚持以人为本
在当前教育教学改革的大背景下,以学生为中心的教育理念被越来越多的高校所重视。因而积木赋能教学,需突出学生的主体地位,构建其个性化培养路径。具体实施方法有:开发基础层、进阶层和创新层等三级积木课程体系,基础层侧重机械结构与传感器认知(如使用单个零件搭建传动构件),进阶层强化系统集成能力(如组合运动控制与图像识别模块实现作物分拣),创新层则注重工程问题解决(如自主设计草莓采摘机器人系统、自动上料机系统等);建立动态能力画像系统,通过分析学生在积木组合、代码编写、故障排查等环节的表现数据,智能推送相关学习资源;推行"双师制",学校老师负责教授理论知识,企业工程师则侧重学生的工程实践能力的培养。
4.3 实施多元融合
打破专业壁垒与校企边界是积木赋能教学的关键突破。在专业融合方面,设计农业生物学与机器人技术的交叉模块,如将作物生长模型与机器人路径规划算法结合,开发智能作业决策积木单元;在产教融合方面,与农业机器人企业共建实训基地,引入工业级模块化组件(如标准化电机驱动模块、高精度定位模块等),使教学内容与产业技术同步更新;在虚实融合维度,构建 VR 仿真与实体操作的混合训练系统,学生可先在虚拟环境中完成积木组合与程序调试,再进行实体机器人测试,显著降低材料的损耗率。
4.4 强化技术支撑
构建硬件、软件和服务三位一体的技术支撑体系,是积木赋能教学创新的保障。硬件方面,继续开发模块化农业机器人实验平台,包含机械结构(如可拆卸关节、特殊执行器、自主行走底盘等)、控制系统(如开源控制器、标准化接口等)、传感器(如多光谱相机、土壤传感器、视觉传感器等)三大类积木组件,支持从单机操作到群体协作的全场景训练;软件资源建设上,建设开放式教学资源库,可以包含多个典型应用案例(如基于机器视觉的杂草识别、病虫害检测与识别、养殖场自动捡蛋机等)、多套开源代码模板、多种常见故障解决方案;智能服务层面,引入人工智能辅助教学系统,通过分析学生积木组合逻辑与代码运行数据,实时分析学习难点并提供解决方案。
本研究通过对积木在农业机器人基础训练中的应用进行深入探讨,发现积木在模拟农业场景、搭建机器人模型、培养团队协作能力和激发创新能力等方面具有显著的优势。通过实际教学案例验证了积木在农业机器人基础训练中的有效性和可行性,为农业机器人专业人才的培养提供了一种新的教学方法和手段。
未来,随着科技的不断发展和农业现代化的不断推进,积木在农业机器人基础训练中的应用将会更加广泛和深入。我们可以进一步探索积木与虚拟现实、增强现实等技术的结合,为学生提供更加真实、生动的学习体验。同时,加强与企业的合作,将积木在农业机器人基础训练中的应用成果转化为实际生产力,推动农业机器人产业的发展。
参考文献
[1]雷良育,曹欢玲,娆立健.“农业机器人”课程教学方案探讨[J].教育教学论坛,2013(46):106-108
[2]黄吉兰.积木编程在程序设计课程教学中的应用[J].电子技术, 2023, 52(10):76-77
基金项目:2024 年度教学工程项目“‘农业机器人’线上课程”(2024KC16)。
作者简介:张开飞(1978-),男,汉族,河南安阳人,博士,副教授,研究方向为智能农业装备研究。

 京公网安备 11011302003690号
京公网安备 11011302003690号


