



- 收藏
- 加入书签

基于定位技术的TBM施工现场多模块安全管控体系探讨
摘要
关键词:TBM 施工;定位;安全管控;电子围栏;AI 预警;本质安全
针对 TBM 施工 “人-机-环” 协同管控存在盲区、设备作业区事故频发的行业痛点,本文结合 TBM 工程门吊吊装、物料转运、轨道运输、掘进作业四大核心模块的风险差异,提出 “多源定位+分级干预” 的全流程安全管控方案。通过超宽带(UWB)、北斗高精度、ZigBee、UWB-IMU融合定位、可见光定位(VLP)、LoRa 等技术的场景化适配,构建 “感知-预警-干预-制动” 闭环,解决信号遮挡、多设备协同响应滞后及定位范围覆盖不全等问题。依托项目验证,使危险区域违规入侵预警响应时间降低,设备碰撞事故发生率下降 90%以上,其中高海拔环境下报警准确率达 98.2%,为不同地质条件下的盾构安全管理提供可落地的技术范式。
1 引言
1.1 研究背景与行业需求
TBM 施工因作业空间封闭、设备密集度高、地质条件复杂,成为建筑施工领域安全事故高发场景。据住建部 2024 年《建筑施工安全统计年报》显示,全国 TBM 项目机械伤害事故中,65%源于人员误入刀盘、吊臂等高危区域,28%因设备协同作业时人员位置信息缺失导致决策滞后。
传统“人工巡检+静态警示”模式无法适配 TBM 长大隧道动态管控需求,四大核心模块风险特性贴合TBM 作业特点:门吊吊装区存在碰撞与坠物风险;叉车、装载机物料转运区因视野盲区易引发挤压事故;水平电机车轨道运输区面临人员横穿与溜车隐患;TBM 掘进区则叠加机械伤害与有害气体泄漏风险。因此,构建覆盖全模块的定位管控体系,成为破解行业安全难题的关键。
1.2 国内外研究现状
国外学者Kim 团队在首尔地铁盾构项目中,将UWB 定位与塔吊力矩限制器联动,但该方案仅针对单一设备,未涉及多模块协同;日本川崎重工在北海道TBM 隧道中应用 RFID 技术管理人员进出权限,因 TBM 强振动导致标签故障率超 15%,预警响应滞后 3s。
国内研究聚焦TBM 场景适配:郑州地铁盾构区间采用 5G+UWB 融合技术,通过防震基站实现人员与设备厘米级协同;太原地铁下穿铁路盾构段用北斗高精度定位监控人员轨迹,规避铁路运营安全风险;长沙工管云平台整合“定位+AI 视觉”技术,在 20 余个盾构项目中实现未戴安全帽、违规靠近危险区等12 类行为自动识别。但现有研究多聚焦单一模块,高海拔、高瓦斯极端环境下 TBM 定位技术适配性仍显不足。
1.3 研究内容与技术路线
本文核心探讨内容包括:①TBM 多模块定位技术选型与场景适配;②门吊、电机车等模块的定位终端部署与电子围栏边界化设计; ③ AI 算法与设备控制系统的深度联动;④跨 TBM 场景技术可行性验证。
技术路线遵循“需求分析→技术选型→模块方案设计→算法优化→案例验证→体系输出”流程。
2 施工现场核心定位技术体系
2.1 定位技术选型与适配逻辑
TBM 施工现场的信号屏蔽、粉尘干扰及动态作业特性,对定位技术提出“高精度、高稳定、低延迟”要求,确定“UWB+北斗+多技术互补”架构,具体选型逻辑如下:
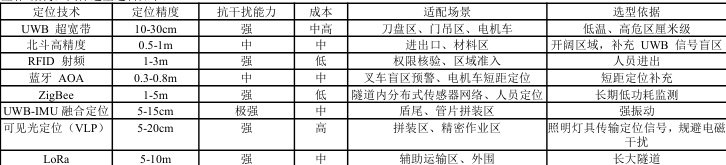
适配优化:
1.抗振动设计:采用防震支架固定,增加橡胶缓冲层,适配TBM 掘进时振动;
2.多技术融合策略:TBM 内部采用“UWB-IMU+ VLP”,盾尾信号遮挡时切换 IMU 惯性定位,拼装时启用 VLP 实现毫米级辅助定位;隧道沿线采用“UWB+LoRa”,直线段用 UWB 保证精度,曲线段及远距离用LoRa 补充覆盖;通风机房、配电房等固定区域采用 ZigBee 构建低功耗监测网络。
构建“感知层-传输层-应用层”三级架构,打破单一项目局限,实现跨场景复用:
感知层:人员佩戴智能安全帽,内置UWB 模块与气体传感器;设备端按模块配置定位终端:电机车安装 UWB 终端;TBM 部署防终端;基站按洞内转弯半径差异化部署,确保信号覆盖率。
传输层:采用“5G+无线自组网”双链路解决盾体内信号屏蔽问题;隧道沿线通过无线自组网实现基站互联,断电时自动切换应急通讯模块,保障定位数据不中断。
应用层:接入智慧工地平台,通过 Modbus-TCP 协议与设备 PLC 系统联动,实时读取设备运行参数;数字孪生模型按10Hz 频率更新可视化展示人员与设备位置关系;支持建设、施工、监理三级权限管理和差异化数据。
2.3 电子围栏与干涉机制通用模型
2.3.1 分级围栏设计
按风险等级划分三级围栏,边界参数结合设备作业特性确定,确保管控精准性:
一级预警区:设备作业影响范围外 2-5m,采用黄色虚拟边界,吊装区按吊装半径 1.2 倍设围栏,电机车区沿轨道两侧0.8m 设线性围栏,预警区触发声光报警。
二级警戒区:设备运行直接影响区1-2m,采用橙色边界,随起重设备运转速度、电机车速度动态调整。
三级禁入区:设备核心作业区,采用红色边界,刀盘周边、吊物正下方、电机车前后,触发强制制
2.3.2 三级干涉响应机制
建立与设备控制系统直连的干预闭环,响应延迟按模块风险等级差异化设置:
一级响应(预警):人员进入预警区,定位标签触发声光告警,平台推送信息至网格员。
二级响应(干预):侵入警戒区,设备自动降速,同时启动车载雷达。
三级响应(制动):误入禁入区,强制切断设备动力,门吊切断电机电源,电机车启动制动,TBM 停止掘进并开启应急通道。3 TBM 施工现场多模块定位应用方案
3.1 门吊作业区:吊装半径动态
3.1.1 风险特征与技术难点
门吊吊装传统人工监护存在三大问题:一是吊装盲区易遗漏人员;二是吊重超限时缺乏自动干预;三是移动吊物碰撞风险。3.1.2 实施路径与参数设计
基站部署:门吊立柱顶部及作业区四角共设6 台 UWB 基站,覆盖半径按作业范围1.2 倍设置,避开高压线减少电磁干扰。动态围栏生成:通过门吊力矩限制器获取实时位置,以吊物为中心生成“3m 禁入区+2m 预警区”,每 100ms 更新一次边界坐标,确保与门吊运行同步。
数据联动优化:定位数据与吊重传感器融合,当吊重超额定值 5%时,自动扩大围栏范围 20%,同时限制门吊运转速度。13AI算法与案例验证
采用“轨迹预测+距离阈值算法”,输入参数包括人员三维坐标、移动速度及运转速度。郑州地铁 3 年10 万+条历史数据训练模型,预测 1s 内人员轨迹,当碰撞概率>80% 时触发干预。峰峰集团九龙矿应用后,吊装区违规入侵响应时间从10s 压缩至0.5s,违规率下降 60%;巴朗山隧道试点期间,定位误差≤30cm,未发生吊装碰撞事故。
3.2 叉车/装载机:盲区碰撞预
3.2.1 风险特征与适配措施
叉车、装载机物料转运区人员流动密集,货叉举升 2.5m 时视野盲区扩大至 6.8 ㎡。针对该问题,采用“定位+激光雷达”双重感知:叉车驾驶室安装激光雷达,智能安全帽增设200 万像素摄像头,实现“位置验证+图像识别”双重校验(验证时间≤200ms)。3.2.2 实施路径、算法优化和案例验证
围栏设置:叉车前后2m、 左右1.5m 设矩形预警区, 装载机铲斗下方 1.8m×1.2m 设静态禁入区, 通过智慧工地平台导入CAD 图纸精准绘制。
盲区补盲:叉车尾部部署 UWB 中继器,消除货叉举升时的定位死角,定位更新延迟≤100ms。AI 算法:融合 YOLOv8 目标检测与多目标轨迹匹配,车载摄像头识别人员、障碍物,结合定位数据计算相对速度,当人员与叉车距<1m 且相对速度>5km/h 时,触发二级响应。中铁六局某钢结构项目应用该技术后,累计识别盲区隐患 37 处,实现零事故运行。3.3 水平电机车:轨道沿线定位与电子围栏边界化
3.3.1 风险特征与环境适配
水平电机车承担物料运输任务,轨道长度与隧道等同,存在三大风险:一是人员横穿易发生碰撞;二是隧道坡度>3‰时溜车风险提升50%;三是传统定位在曲线段信号遮挡严重。针对高原隧道特殊环境,选用工作温度-30℃-70℃、防护等级 IP68 型终端,避免低温死机。3.3.2 定位模块部署与围栏设计
(1)终端与基站安装
电机车终端每台安装4 台 UWB 终端,车头 1 台监测前方人员、车尾 1 台监测后方、车身两侧各 1 台监测侧向,与轨道平行偏差≤2°,每日开工前用激光测距仪校准,确保坐标偏差≤5cm。
沿线基站采用支持北斗频段的双模基站,直线段 200m/台、曲线段150m/台,安装于隧道侧壁处,每周用全站仪校验位置;隧道出入口30m 内增设2 台基站,强化信号覆盖。
(2)电子围栏边界化实现
静态边界以轨道中心线为基准,两侧 0.8m 设线性预警区、0.5m 设禁入区,通过平台可视化配置(支持 CAD 导入,绘制精度±1cm),边界采用黄色(预警)、红色(禁入)虚拟线段。
动态边界以电机车实时位置为中心设矩形围栏,预警区前后距离随速度调整(最低为10m)、左右 1.5m;禁入区前后 8-10m、左右 1m,载重超额定值 80%时扩大 10%。
触发条件:人员坐标与围栏边界距离≤5cm 判定“接近”,<0 判定 “侵入”,按等级触发响应。(3)数据联动与干预执行
通信协议:定位终端通过Modbus-TCP 协议与电机车PLC 互联,数据传输频率10Hz、延迟≤100ms,传输内容含人员坐标、侵入状态.
多级干预:一级响应启动声光报警器与驾驶室红色预警框;二级响应 0-2s 内降速至 5km/h,制动灯常亮;三级响应超 2s 或距离<3m 时,启动电磁制动并断电(≤50ms),同步推送应急信号至调度中心。
3.3.3 创新技术与案例验证
引入“轨迹异常检测”算法,通过 10Hz 采样频率的定位数据,采用最小二乘法拟合电机车轨迹,当偏离轨道±30cm 时判定溜车,立即触发报警与制动。郑州地铁 3 号线应用该技术后,轨道违规事件从月均 8 起降至 0.6 起,救援响应时间从 15 分钟缩短至3 分钟;巴朗山隧道试点期间,定位误差≤25cm,2 次人员接近预警区事件均在 0.4s 内报警,未发生安全事故。
3.4 TBM 核心作业区闭环管控与 AI 算法细化
3.4.1 风险特征与防爆适配
盾体区存在机械伤害及有毒有害气体泄漏风险,高瓦斯地层还面临爆炸隐患。如久隆水库高瓦斯隧洞,采用防爆基站与本质安全基站,避免电火花引发事故。
3.4.2 实施路径与多维感知
基站部署:盾体顶部设 3 台防爆基站,刀盘附近安装 2 台本质安全基站,间距 15-20m,覆盖掘进面 50m 范围,防护等级≥IP68,确保刀盘区信号覆盖率 100%。
标签集成设计:定位标签集成气体传感器(采样频率 2Hz),当气体浓度超标且人员在预警区时,同步触发标签振动声光告警与喷淋统(启动时间≤1s)。
设备联动:通过 Modbus 协议将定位数据接入 TBM PLC,实时读取刀盘转速、推进压力等参数,传输延迟≤100ms,支持 24h 数据溯,便于事故分析。
3.4.3 AI 算法输入层参数与决策逻辑
采用“时序数据异常检测+双重校验”算法,输入层参数均结合盾构施工实际需求确定,参数细节及选择依据按照以下原则:人员定位通过三维坐标确保不入禁入区、保持与设备距离避免碰撞、识别进入禁入区时间提前预警;TBM 运行通过参数采集提前预警;环境有毒有害气体超出预警值提前报警;设备状态接入盾尾密封压力等关键参数防止涌泥涌水。
干扰排除:预设电机电磁干扰、粉尘遮挡等 12 类干扰源识别模型,通过卡尔曼滤波剔除无效数据,算法准确率提升至 98%以上,久隆水库项目应用中误报率<2%。
3.4.4 案例验证
巴朗山隧道在TBM 作业区应用该方案,防爆基站耐受-25℃低温,2025 年 5 月 12 日 1 起人员误入刀盘区事件中,系统 0.8s 内完成停机与应急通道开启;久隆水库高瓦斯隧洞应用期间,瓦斯预警准确率100%,设备故障率为 0,验证了方案的可靠性。
3.5 TBM 定位技术其他专项场景
3.5.1 ZigBee:固定辅助区低功耗监测适配场景:通风机房、配电房等硐室空间狭小场所实施:壁挂安装20m/终端,1.5m 禁入区;非巡检时段全区域预警,联动 TBM 通风机 PLC。
案例:武汉地铁8 号线通风机房违规从月均 2 起降至 0,成本降 60%,终端抗振动续航超1 年。
3.5.2 UWB-IMU 融合定位:信号遮挡区适配场景:盾尾、螺旋输送机周边,UWB 定位失效。
实施:终端集成6 轴 IMU,UWB 信号丢失时惯性定位(续航≥10min);盾尾密封装置周边 1m 设禁入区,振动超标时强化定位频率。案例:上海地铁14 号线盾尾定位误差 8-12cm,误报率降 70%,适配硬岩挤压工况。
3.5.3 可见光定位:管片拼装精密作业
适配场景:管片拼装,需厘米级定位辅助,规避强电磁干扰。
实施:4 盏VLP 改造 LED 灯全覆盖,接收器精度±8cm;联动管片拼装机械臂,距离<0.5m 且机械臂运动速度>5mm/s 时停机。
案例:广州地铁 11 号线管片拼装效率升15%,碰撞风险为0,适配隧道拼装精度要求。
3.5.4 LoRa:长隧道辅助运输
适配场景:10km+隧道辅助轨道、外围边坡区,需远距离低功耗定位。
实施:3 个LoRa 网关(TBM 进口/出口/中间),30s 上传 1 次数据;轨道两侧 1m 设预警区,边坡区定位触发时提醒防坠落。
案例:成都地铁19 号线项目覆盖17km,违规从月均 5 起降至0.3 起/月,成本降 70%,适配长距离隧道。
4 多场景可行性验证与效益分析
4.1 技术可行性跨场景验证
4.1.1 极端环境适配性
高海拔低温:巴朗山隧道海拔3800m、-25℃实测,定位基站连续运行 30 天无故障,终端续航从 72h 降至 65h(下降 10%),仍满足作业需求;
高瓦斯:久隆水库隧洞采用防爆设备,基站正常工作,报警响应时间≤1s;
信号屏蔽:郑州地铁盾构机内部部署5G 微基站后,定位数据传输延迟从 500ms 降至 80ms,覆盖率达 99.5%,刀盘区无信号死角。4.1.2 系统兼容性
与主流设备、平台兼容,适配中铁装备、海瑞克、小松等品牌TBM PLC 系统,联动响应时间≤100ms,参数读取准确率 100%。
4.2 经济与社会效益
4.2.1 成本效益对比
按10km 盾构隧道测算,定位系统总投入约 180 万元(50 台基站 150 万元、200 个标签20 万元、平台 10 万元),较传统人工管控(年投入260 万元,含20 名相关管控人员薪资)降低30.8%;武汉地铁 12 号线2024 年应用后,事故率从 1.2 起/公里降至0.06 起/公里,工期提前 15 天,间接经济效益超千万元。
4.2.2 安全效益提升
多项目数据显示,实施后危险区域违规入侵事件减少90%以上,设备碰撞预警响应时间≤0.5s,人员救援效率提升 83%(15 分钟降至 2.5分钟),应急处置准确率达98.2%,未发生重大安全事故,显著提升施工安全性。
4.3 典型案例汇总
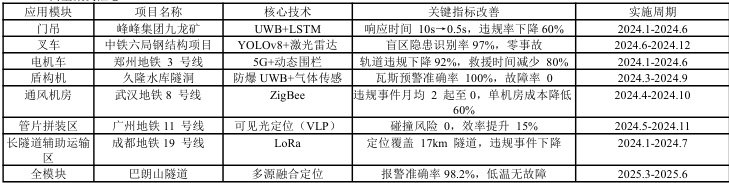
5 结论与展望
5.1 研究结论
本文构建的 TBM 施工多模块定位技术管控体系,通过技术选型优化、标准化实施路径及算法深化,解决传统管理的三大痛点:一是通过“UWB+北斗”融合与防爆低温设备,满足高海拔、高瓦斯等极端环境需求,定位误差≤30cm;二是建立分级围栏与干预机制,实现从预警到制动的全流程管控,响应时间≤0.8s;三是细化 AI 算法输入层参数与决策逻辑,提升预警准确率至 98% 以上。多案例验证表明,多模块定位方案可降低 90%以上的高危区域事故风险,为TBM 施工安全管理提供通用技术范式。
5.2 未来展望
1 数字孪生融合:构建设备-人员-环境三维模型,将定位轨迹与管片拼装环数、地质参数动态匹配,实现风险预判精度提升。2 预测性管理:基于 10 万+条定位轨迹大数据,分析人员作业习惯,识别“频繁靠近预警区”“违规横穿”等危险行为,提前推送培训提醒(准确率≥90%),从源头减少违规。
3 无人化协同:结合续航≥30min 的无人机巡检与定位系统,在刀盘、轨道等高危区实现“无人作业+远程监控”,目标将高危区人作业时长减少50%,进一步降低安全风险。
4 新型定位技术探索:研究 UWB-视觉融合定位,在TBM 风险区安装AI 摄像头,结合 UWB 定位数据实现 “位置+行为识别”双重管控;试点无源 RFID 定位升级,开发超高频 RFID 标签,替代现有低频标签,适配隧道内快速移动场景;探索量子定位技术在高瓦斯隧道的应用,利用量子信号抗干扰特性,解决传统无线定位在强电磁环境下的精度衰减问题。
参考文献
[1] 住建部。建筑施工安全统计年报 [R]. 2024.
[2] 郑州地铁集团. 5G+UWB 定位技术在盾构施工安全管控中的应用 [J]. 都市快轨交通,2024, 37 (2): 12-18.
[3] 。巴朗山隧道项目信息化技术方案(第二版)[R]. 2025.
[4] 王建军,李刚。盾构隧道 UWB 人员定位系统抗干扰设计 [J]. 中国公路学报,2023, 36 (8): 165-173.
[5] 长沙工管云平台研发组。智慧工地 “定位 + AI 视觉” 融合技术应用 [J]. 施工技术,2024, 53 (10): 89-94.
[6] 久隆水库建设指挥部。高瓦斯盾构隧洞人员定位与瓦斯预警系统实践 [J]. 水利水电技术,2024, 55 (7): 201-
[7] 河南省人民政府。世界首个 5G 技术盾构法掘进隧道项目测试应用成功 [EB/OL]. 2021.
[8] Kim J, Lee S. Dynamic Warning System for Shield Tunneling Based on UWB Positioning[J]. Tunnelling and Underground Sp Technology, 2022, 126: 104589.
[10] 峰峰集团。煤矿盾构门吊作业区 UWB 定位预警系统应用报告 [R]. 2024.

 京公网安备 11011302003690号
京公网安备 11011302003690号


