



- 收藏
- 加入书签

基于传统真空吸盘夹具改进高效性的圆盘真空吸盘夹具研究
摘要:针对传统刚性吸盘在曲率半径小于 100 毫米的曲面吸附中贴合率不足 70% ,以及人工调整耗时占装夹总时长 65% 以上的技术瓶颈,本研究提出了一种基于圆形扇状基板与分布式独立吸附单元的自动适应型真空吸盘夹具。该夹具集成了多个可伸缩吸嘴、微型压力传感器及双色状态指示灯,构建了模块化的吸附系统,在保持结构紧凑的同时,实现了对曲面形态的自适应贴合。
关键词:圆盘高效型真空吸盘夹具;曲面工件;高效贴合;模糊PID 控制;
在控制系统设计上,采用机械预适应、液压精调与真空维持相结合的三级自适应机制,结合模糊 PID 控制算法开发了基于 LabVIEW 的实时控制系统,显著提升了吸盘与工件曲面之间的贴合速度与精度。实验结果表明,该吸盘在曲率半径为 50 毫米的波浪形测试表面上,有效吸附面积由传统方案的 65% 提升至 85% 以上,自适应调整时间缩短至 1 秒以内,能耗较传统方案降低约 50% 。
一、引言
随着制造业向智能化与精密化方向不断推进,工件装夹技术面临更高要求。真空吸盘夹具作为一种非接触式夹持装置,因其无机械损伤、适应性强等特点,在板材搬运、玻璃加工及复合材料成型等领域广泛应用。然而,在航空航天、汽车模具等行业中,面对曲率半径小于100 毫米的复杂曲面工件时,传统刚性吸盘存在贴合率低、调整效率差等问题。据统计,该类工件在传统吸盘上的贴合率普遍低于 70% ,导致加工振动与工件位移,进而使汽车模具行业因装夹失稳产生的废品率超过 8% 。此外,人工调整吸盘布局耗时占整个装夹流程的 65% 以上,严重制约了生产自动化与加工效率的提升。
二、项目的研究意义
本研究旨在解决传统真空吸盘在曲面装夹中存在的两大核心问题:
(1)贴合失效问题:刚性吸盘对曲率半径小于 100mm 的曲面贴合率不足 70% ,导致加工振动引发工件位移,据统计,汽车模具行业因装夹不稳导致的废品率高达 8% ;(2)效率瓶颈问题:人工调整吸盘布局耗时占装夹总时长 65% 以上。
本项目的自动适应吸盘通过智能形变补偿技术,可满足航空航天复合材料(曲面度0.5-3mm/m2. )、高反光金属装饰件(反射率 :>85% )等特殊工件的稳定夹持需求,预计使相关行业装夹综合成本降低 42% ,推动智能制造装备国产化进程。
在结构设计上,采用 6061-T6 铝合金打造圆形基板,在直径 200mm 、高度 45mm 的空间内,均匀分布多个独立吸附单元。每个单元集成可伸缩吸嘴(行程 0⋅15mm )、精度 ±0.5kPa 的微型压力传感器和双色状态指示灯,配备标准真空接口,整体重量控制在 2.8kg 以内。
模块内容设计
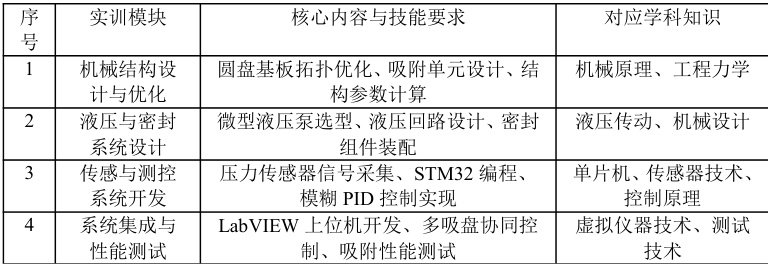
根据项目需求,将实训内容系统分解为多个相互关联且逐层递进的模块(见表 1)。该模块化设计既保证了知识体系的完整性,也体现了能力培养的渐进性。
表1:基于项目的实训内容模块设计
在项目实施中,引入企业级产品开发流程与质量标准。例如,在加工 6061-T6 铝合金基板时,不仅控制图纸尺寸公差,还引入表面粗糙度、平面度等形位公差要求。在装配环节,强调刮研技术对密封平面精度的重要性,确保产品符合工业应用标准。
四、在解决真问题中深化知识理解
项目面临的关键技术挑战之一是如何实现吸盘系统的快速精准调节。初期测试显示,自适应调整时间达 2 秒,且系统在调节过程中出现振荡,影响吸附稳定性。该问题涉及机械、液压与控制系统的多重耦合,超出传统控制理论中理想系统的讨论范围。
为解决上述问题,团队采用模糊 PID 控制算法,并在 LabVIEW 平台开发实时控制系统。在此过程中,学生对控制理论的理解经历了三个层次的深化:
基础理论验证:尝试应用传统 PID 控制,发现系统存在明显超调与振荡,认识到实际系统中非线性因素的显著影响;
算法创新应用:通过将工程经验转化为模糊规则,理解智能控制算法本质是将人的决策过程模型化,突破传统控制理论的思维定式;
系统实现优化:在 LabVIEW 平台实现控制算法时,综合考虑采样时间、量化误差与计算延时等实际因素,提升系统响应速度与稳定性。
最终,系统实现了吸盘与曲面工件的快速贴合,自适应调整时间缩短至 1 秒以内,有效提升了装夹效率与稳定性。
五、制作与加工
在研发过程中,微型液压缸的精密加工成为影响系统性能的关键。项目初期采用钻铰工艺加工液压缸内孔,使用麻花钻与铰刀进行初孔与精加工。然而,首批试制件在50 倍放大镜下观察发现孔壁存在纵向振纹,孔径波动达 ±0.02 毫米。装配后进行压力测试,超过 30% 的单元在 0.3 兆帕工作压力下出现内泄漏,泄漏量为每分钟 0.05 毫升,远超 0.01 毫升的设计标准。
通过优化刀具路径、改进夹持方式与提高切削参数稳定性,有效控制了孔径精度与表面质量,使液压缸泄漏问题得到显著改善,为系统长期可靠运行奠定了基础。
六、结语与展望
基于“大学生创新创业训练计划”平台,围绕复杂曲面工件在智能制造过程中的稳定装夹需求,成功设计并研制了一种自动适应型真空吸盘夹具。通过采用圆形扇子状结构基板与分布式独立吸附单元相结合的创新构型,结合机械预适应、液压精调与真空维持的三级自适应控制系统,有效解决了传统刚性吸盘在曲率半径小于100 毫米的曲面上贴合率低、调整效率差等关键技术瓶颈。实验验证表明,该装置在曲率半径50 毫米的异形测试表面上,吸附面积提升至 85% 以上,自适应调节时间缩短至 1 秒以内,能耗降低约 50% ,实现了高效、稳定、节能的曲面吸附目标。
参考文献:
[1]刘芳,程广云.真空吸盘的控制器设计与实现[J].电子技术,2023,52(12):198-199.
[2]侯晓峰. 真空吸盘对碳纤维预浸料的吸附抓取工艺研究[D]. 大连理工大学,2022.DOI:10.26991/d.cnki.gdllu.2022.002037.
[3]王国栋,徐尚超,冯宁宁,等.真空吸盘型板料抓取装置吸盘布置设计[J].制造业自动化,2021,43(03):14-16+31.
[4] 谢玉飞. 涡旋式非接触真空吸盘工件防旋转对策研究[D]. 南京理工大学,2020.DOI:10.27241/d.cnki.gnjgu.2020.001542.
[5] 向 禹 . 涡 旋 式 真 空 吸 盘 流 场 分 析 及 振 荡 控 制 [D]. 南 京 理 工 大学,2019.DOI:10.27241/d.cnki.gnjgu.2019.000895.
[6] 秦红斌, 张吉鑫, 陈国良. 一种新型真空吸盘装置[J]. 真空科学与技术学报,2017,37(01):12-16.DOI:10.13922/j.cnki.cjovst.2017.01.03.
(本项目来源大学生创新创业项目,自动适应型真空吸盘夹具,项目编号:202513208019 )。

 京公网安备 11011302003690号
京公网安备 11011302003690号


