



- 收藏
- 加入书签

智能控制技术在风力发电机组偏航与变桨中的实践探索
摘要:风力发电机组在复杂风场中运行时,偏航与变桨控制影响能量捕获与结构安全。传统固定参数控制在高湍流下响应滞后、动作过多。本文提出基于多源气流数据的智能控制方法,利用测风仪、气象塔和激光雷达构建气流模型,并以人工智能算法生成最优控制指令,实现风况预测、健康约束与动态优化的协同调节。湖南山地风场应用表明,该方法可显著减少偏航与变桨高频动作、降低能耗与磨损、提升功率稳定性。暴风穿越策略使机组在极端风况保持安全并维持发电,降低停机率和疲劳损伤,验证了该技术的高效与可靠性。
关键词:风力发电机组;偏航控制;变桨控制;智能控制;数据驱动
一、引言
风力发电机组的运行原理是利用风力带动风车叶片转动,将风能转化为机械能,再通过传动转子将机械能转化为电能。风速达到3m/s 时,即可带动风力发电机发电,在此过程中无须使用燃料,且不存在辐射或空气污染问题,因此,风力发电有广阔的发展前景。风力发电机组主要由发电机、齿轮箱、塔架等组成,利用增速装置,将风轮的恒定转速传输给发电机,即可完成机械能与电能的转化过程。风轮包含若干个叶片,可以将风能直接转化为机械能[1]。在风力带动下,桨叶上形成的气动力可以推动风轮转动,桨叶通常采用玻璃钢或碳素纤维等复合材料,具有强度高、重量轻的特点。在风速大小、方向等因素变化的影响下,风轮转速很可能处于不稳定状态,因此,需要利用齿轮箱提升风轮转速,当转速达到标定转速后,还需要利用调速机保证风轮转速的稳定性,并驱动发电机。
风力发电从规模化建设迈向高可靠性与智能化运维阶段,偏航与变桨系统性能对能量捕获与运行稳定性具有关键影响。偏航系统通过调整机舱方位提升风能利用率,变桨系统通过调节桨距角稳定功率并削减载荷。随着单机容量增大与风场环境复杂化,传统以固定参数和阈值判断为基础的偏航控制在频繁风向扰动下易产生高频微小动作,引发能耗上升与机构磨损。依赖简化气动模型的PI/PID 变桨控制在突发湍流和非稳态风速下难以保持快速平稳调节,导致动作密集与叶片根部载荷振荡加剧,长期运行后影响可靠性。人工智能与数据融合技术的发展使控制系统具备对风况变化与机组动态特性的实时识别能力,通过数据驱动的预测性与自适应调节提升响应精准度,增强结构安全并为寿命管理提供支持。本文基于运行数据与工程经验,分析偏航与变桨系统的典型问题,提出面向复杂风况的智能化控制优化方案,并评估其在实际风场与极端环境中的应用效果。
二、风电机组偏航与变桨运行现状的数据分析
(一)偏航系统运行特征与问题表现
运行监测数据显示,在山地与丘陵地形条件下,风电机组的偏航系统受到复杂地形诱导风的不稳定影响,地形起伏造成的局地风向切变与涡流效应显著增强了偏航负荷。由于山谷间风速梯度剧烈变化,风向在短时间内呈现高频摆动,机舱方位调整变得频繁且幅度不均。部分风电场测得湍流强度较平原地区高出20%以上,直接导致偏航动作次数急剧增加。运行数据表明,典型山地机组日均偏航次数约为  ,小幅度偏航调整(角度小于 5∘) 占比超过 65% ,其中大部分为应对瞬时风向波动的无效响应。偏航电机在高频调整状态下长期运行,电流波动显著,均方根值较额定电流高出约 30% ,驱动系统热负荷明显上升,能耗增加约 12% 。偏航齿轮箱在频繁正、反转中承受的啮合冲击与轴向应力持续累积,机械磨损速率较平原机组提升近三成。山地风场偏航对风实际运行情况如下图1 所示。
,小幅度偏航调整(角度小于 5∘) 占比超过 65% ,其中大部分为应对瞬时风向波动的无效响应。偏航电机在高频调整状态下长期运行,电流波动显著,均方根值较额定电流高出约 30% ,驱动系统热负荷明显上升,能耗增加约 12% 。偏航齿轮箱在频繁正、反转中承受的啮合冲击与轴向应力持续累积,机械磨损速率较平原机组提升近三成。山地风场偏航对风实际运行情况如下图1 所示。
图1 偏航状态图

如图1 所示,在极短时间内,风电机组完成了多次左、右偏航动作。在这种地形诱导湍流环境下,偏航系统难以保持稳定迎风,平均偏差维持在 2∘~3∘ 之间,功率捕获效率下降约 1.5% 。频繁的小幅偏航使控制系统响应呈现滞后与冗余并存的特征,不仅增加执行机构的疲劳载荷,还缩短齿轮箱和电机的常规维护周期,风电机组偏航类故障率大幅提升,运维成本水涨船高。上述现象表明,山 地复杂 场下的非定常湍流是造成偏航频繁、能耗上升与设备应力积累的关键因素,传统基于固定阈值的偏航控制难以在此类环境中实现精确对风与能效平衡。
(二)变桨系统运行特征与性能偏差
变桨系统承担功率调节与载荷削减任务,是影响机组运行稳定性的关键环节。运行数据表明,在额定风速区间(11–13 m/s)内,部分机组桨距角波动标准差达 2.5∘ ,超过设计期望值的两倍。功率曲线随之出现 ±7% 的波动幅度,导致有效输出下降约 2% 。同时,变桨执行机构在 10 分钟内的动作次数常超过  ,明显高于设计耐久限值。频繁的角度切换不仅增加伺服电机热负荷,还导致叶片根部疲劳载荷幅值上升约 18% ,加速结构疲劳累积。告警统计显示,变桨相关事件约占机组总告警数量的 23% ,其中桨距角反馈异常和伺服电机过载最为常见。这些现象反映出现有固定参数控制策略对复杂风场的适应性不足,无法在功率平稳与部件寿命之间实现动态平衡[2]。
,明显高于设计耐久限值。频繁的角度切换不仅增加伺服电机热负荷,还导致叶片根部疲劳载荷幅值上升约 18% ,加速结构疲劳累积。告警统计显示,变桨相关事件约占机组总告警数量的 23% ,其中桨距角反馈异常和伺服电机过载最为常见。这些现象反映出现有固定参数控制策略对复杂风场的适应性不足,无法在功率平稳与部件寿命之间实现动态平衡[2]。
(三)暴风情况下的风机典型运行状态
基于偏航与变桨系统的长期运行分析可见,机组在平稳风况下的问题较为明确,而在暴风与强阵风条件下,控制策略的极限性能与结构承载能力更易暴露。强风引发剧烈气动扰动,使偏航与变桨呈现高频联动,控制系统需同时应对频繁输入与瞬态冲击。当风速骤升并伴随随机风向摆动时,偏航系统被迫持续修正迎风角,高湍流使风向在数秒内多次反转,导致偏航电机频繁启停,电流峰值较额定水平增加约 40% ,齿轮啮合冲击增强,轴系振动幅值上升25%以上,热累积加速部件老化。长期维持此工况将显著提升偏航驱动过载风险,并可能导致机械传动损伤与偏航失效。变桨系统同样承受强烈扰动,伺服电机处于极限输出,叶片根部疲劳载荷剧烈波动,局部应力超限成为关键结构隐患。在风速超过设计阈值时,传统控制依赖固定逻辑的被动停机模式,过程中惯性超调与气动力突变叠加,使叶片振动峰值显著增加,偏航制动系统承受额外冲击,部分机组出现偏航与变桨驱动的并发故障。统计结果表明,暴风停机事件平均恢复时间超过6 小时,不仅降低可利用率并减少发电量,也加速部件老化,传统策略在暴风环境中的迟滞与频繁保护切换进一步加剧能量损失与结构风险,如图2所示为暴风环境下风速关系图。
图2 暴风环境风速关系图
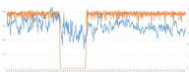
由此可见,暴风条件下的风机运行问题集中体现于控制滞后与保护策略的刚性限制。若能在控制体系中引入风况预测、健康约束与动态优化机制,机组可在保障安全的前提下实现有序降载和柔性调节,减少停机损失并延长关键部件寿命。
三、智能控制技术在偏航与变桨中的应用思路
现代风电控制系统正从单机自适应向场域协同智能化方向演进。基于气流数据模型的智能控制方式成为提升群控效能的重要技术路径。该 风雷达及 SCADA 系统数据,通过对风速、风向、气压梯度和湍 场的动态气流场模型。模型实时更新风能分布特征,并结合人工智能算法进行优化计算,为场域内每台风机生成独立的最优运行指令[3]。这种策略使偏航与变桨控制不再局限于单机的局部测量,而是以全场风能态势为依据进行协同调度,从而在复杂地形和非定常风场条件下实现全局最优控制。
(一)偏航控制的智能化优化路径与实现要点
偏航系统智能化控制旨在提升迎风精度、减少无效动作并延长执行机构寿命。基于气流数据模型的全场预测系统能够超越机组局部测量,获取更全面的风向演变趋势。控制算法融合多源数据,对未来10 至30 秒风向进行预测,提前修正偏航角度,避免短周期扰动造成的高频调整。动态阈值机制依据风况置信度与执行机构健康状态自适应调整偏航死区角,使响应速度与结构保护保持平衡。湖南山地风场的运行结果表明,A 型机组应用智能控制后,偏航日均动作由约185 次降至 120% ,小幅动作显著减少,能耗下降约三分之一,电机电流负载降低 25% ,齿轮箱温升下降约6℃,迎风误差稳定在 2.8∘ 以内,机舱姿态更为平稳。仿真结果显示,该模型在强湍流条件下可将偏航频率降低约 40% ,有效减轻驱动系统过载与疲劳冲击,对齿轮与轴承寿命具有积极意义[4]。基于气流模型的智能偏航控制实现了由“被动响应”向“预测调整”的转变,通过融合现场数据与健康约束逻辑,使机组在高湍流环境下仍能保持高效与稳定运行。
(二)变桨控制的智能化策略与性能改进手段
变桨系统承担功率调节与结构载荷削减的重要任务。基于全场气流模型的模型预测控制(MPC)算法能够根据未来风速趋势优化桨距调整曲线,实现平滑、前馈的功率控制。控制器通过动态权重平衡功率偏差与执行机构负载,在不增加伺服压力的前提下维持输出稳定。仿真结果表明,该方法可将功率波动幅度从±7%降低至4y±3.5% ,桨距调整频率减少约 40% 。
湖南风场的 B 型机组在改造前暴风季节中,变桨相关告警频发,桨距角反馈不一致和伺服电机过载为主要问题。经引入深度强化学习与MPC 协同策略后,系统在额定风速区间内实现了实时优化调度。现场数据表明,桨距角动作频率下降 38% ,平均响应延迟缩短0.3 秒,功率曲线波动降至± 3%: 叶片根部疲劳载荷幅值降低 14% ,桨距电机温升减少8℃,设备可靠性显著提升。长期运行监测结果显示,改造后变桨相关告警数量下降 45% ,故障触发间隔由 120 小时延长至175 小时,体现出智能控制在高湍流与强切变条件下的稳定优势。
结合仿真分析与现场验证,智能变桨控制不仅减少了伺服过载与结构振荡,还通过优化动作序列实现了能量捕获与疲劳损伤的协同平衡。这种自学习与预测并行的控制方式有效提升了变桨系统在复杂风场中的鲁棒性,使风机在高风速环境下仍具备平稳功率输出与较低载荷水平,为全场级优化奠定了技术基础。
(三)数据驱动的诊断与健康管理
应力响应进行综合判定,在确保结构安全的条件下自动选择适度降载运行模式。该方案在保持关键部件应力不超过安全阈值的前提下,使机组能够在暴风环境中维持部分发电,显著提升风场整体发电利用率。仿真与实测结果表明,暴风穿越策略可将极端风况下的停机率降低,平均发电能力提升,同时未出现过载报警或结构损伤现象,验证了方案的安全性与可行性。数据分析显示,在暴风穿越运行过程中,偏航与变桨系统的动作频率相较传统停机模式降低约 30% ,执行电流峰值下降 25% ,叶片和轴承疲劳载荷水平明显减小。该策略结合智能预测与健康评估,实现了从“被动保护”向“主动穿越”的控制转变,使风机在极端气候条件下依旧具备稳定的功率输出能力[5]。综合运行结果表明,暴风穿越方案不仅提升了机组的发电效率,也显著延长了关键部件的使用寿命,为高湍流与强风区风电场的智能化运行提供了新的技术方向。
四、综合效果和潜在价值
基于气流数据模型与智能控制策略的联合应用,使风电机组在复杂风场中实现了能效提升与结构安全的动态平衡。系统通过对全场风速、风向及湍流强度的高精度拟合,为每台机组生成独立运行指令,实现偏航与变桨的协同优化。智能算法在持续学习过程中不断修正控制参数,使机组在非定常风况下保持对风稳定、功率输出平滑与执行机构负载可控的综合特性。
湖南山地风场的工程实践表明,应用该方案后,机组偏航与变桨动作次数明显下降,能耗降低约一成,叶片与轴承等关键部件疲劳载荷幅值减少超过 15% 。在暴风穿越模式下,控制系统能够依据预测结果与健康约束模型动态限载,使机组在暴风环境中保持连续运行而不触发过载保护,停机率下降约 20% ,发电能力提升近 8% 。这些结果验证了智能控制在高湍流与极端风况下的适应性,为风电场持续运行提供了可靠支撑。
综合评估显示,气流模型驱动的智能控制不仅优化了单机性能,也提升了群控层面的能量利用效率。通过减少过载、延缓部件疲劳和降低运维成本,该技术为山地及沿海复 的风电开发提供了新的路径。智能化控制体系的推广,将推动风电场由传统被动响应向主动感知、预测与自适应运行转变,为实现风电装备的高可靠、低成本与长寿命运行奠定技术基础。
五、结论
风电机组的偏航与变桨控制关系到整机性能、结构载荷与寿命。研究表明,传统固定阈值控制难以适应非定常风场中的快速气动变化,而基于气流数据模型与智能算法的控制体系能够在全场尺度完成预测与自适应优化。通过风况建模、短期预测与健康约束的融合,系统在能量捕获、载荷控制与寿命之间形成动态平衡,使机组在复杂风况下保持稳定高效运行。偏航控制引入气流预测与动态阈值后,迎风精度提升,冗余动作与能耗降低;变桨系统通过模型预测控制与强化学习实现功率曲线平滑化与执行器负载减少。暴风穿越方案使机组在极端风况下具备柔性降载与持续发电能力,突破传统暴风停机限制。湖南地区的验证结果显示,智能控制可提升机组年平均可利用率约 1.5% ,降低运维成本近一成,关键部件寿命延长约 20% 。该技术通过气流模型、算法优化与健康管理的协同集成,推动风电机组由被动响应向主动预测决策转变,为复杂地形与极端风况下的安全、高效与可持续运行提供重要支撑。
参考文献
[1] 王家坤,司化涛,王希转,张媛,赵伟平.基于MQ-WaveNet 的智慧新能源大规模风力发电智能控制[J].可再生能源,2024,42(10):1341-1347.
[2] 包连祥.人工智能技术在风力发电领域的应用分析[J].光源与照明,2024(04):183-185.
[3] 朱瑜.风力发电及其智能控制技术探讨[ ].通讯世界,2024,31(02):160-162.
[4] 殷学雷.风力发电的应用及发展 ].光源与照明,2022(09):238-240.
[5] 黄学文,许冬书.风力发电及其智能控制技术研究[J].光源与照明,2021(08):97-99.

 京公网安备 11011302003690号
京公网安备 11011302003690号


