



- 收藏
- 加入书签

基于激光雷达和视觉的室内智能小车系统教学实验设计
摘要:为深化学生对机器人系统集成与智能感知技术的理解,本文设计了一套基于激光雷达与视觉融合的室内智能小车教学实验。实验系统以 ROS 为框架,整合了激光 SLAM 建图、多传感器融合定位与自主路径规划等关键技术。通过“理论-仿真-实践”一体化的项目式教学,有效提升学生在感知、决策与控制方面的创新与实践能力。
关键词:激光雷达;视觉感知;ROS;SLAM;传感器融合;路径规划
0 引言
随着科技的迅猛发展,培养高素质的工程技术人才已成为国家建设和创新发展的迫切需求。为了更好地培养学生的实践能力,本文设计了一种基于基于激光雷达与视觉融合的室内智能小车教学项目,旨在帮助学生深入了解导航、电子及无人系统等领域的技术,培养学生的实际动手能力和团队协作精神。
1 实验系统设计
实验平台核心为ROS 智能小车,其主要硬件配置包括:(1)感知单元:RPLIDAR A1 系列激光雷达,用于360°环境扫描; Intel RealSense 深度相机,用于视觉信息采集。(2)计算单元:Jetson Nano 作为上位机,负责运行 ROS 核心、SLAM 算法及视觉识别模型。(3)控制单元:STM32F4 系列作为下位机,负责电机控制、里程计解算与底层通信。(4)软件平台:采用Ubuntu 与ROS Noetic/Humble 版本,提供完善的机器人开发与仿真环境。

图1 智能车实物图
2 实验教学过程
实验教学遵循“由浅入深、软硬结合”的原则,分为四个核心环节:
(1)系统搭建与基础驱动。学生首先完成智能小车的硬件组装与网络配置,随后在 ROS 环境中编写激光雷达和摄像头的启动节点,并利用RVIZ 可视化工具验证传感器数据是否正确发布。此阶段重点在于熟悉ROS 的基本通信机制与传感器驱动。
(2)环境感知与建图定位。在本阶段,学生操作小车在实验室内运动,使用 Gmapping 算法构建高精度二维地图。同时,启动视觉识别节点,通过摄像头实时检测并标注环境中的目标物体。引导学生分析激光 SLAM 的优缺点,并思考视觉信息如何辅助回环检测以纠正建图累积误差。
(3)多传感器融合定位。这是实验的进阶与难点。学生需要配置并启动扩展卡尔曼滤波(EKF)节点,将激光 SLAM 提供的位姿估计、视觉模块计算出的相对位姿变化(视觉里程计)以及 IMU 的角速度/加速度数据进行融合。通过对比融合前后在RVIZ 中的定位轨迹,直观理解融合技术对抑制漂移、提升稳定性的关键作用。(4)任务导向的自主导航。最后,学生需完成一个综合导航任务:在已构建的地图上设置起点和目标点,并要求小车在行进过程中识别并绕开动态障碍。这需要他们调试 move_base 的参数,平衡路径规划的全局最优性与局部避障的实时性、安全性。
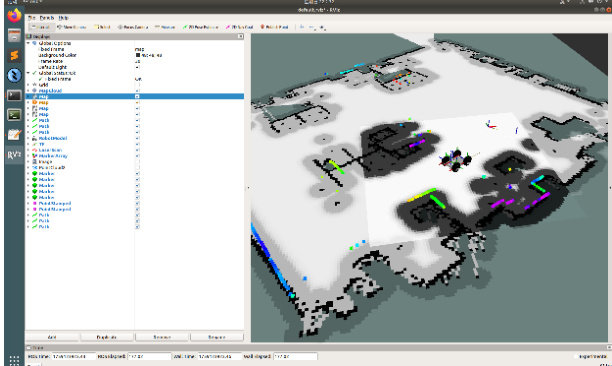
图2 智能车室内SLAM 建图结果
3 实验成果与分析
通过实验,学生能够掌握激光雷达与视觉传感器的数据获取与处理方法,理解SLAM 与路径规划的基本原理,具备多传感器系统集成与调试能力。实验结果表明,小车可在室内环境中稳定实现建图、目标识别与自主导航,验证了系统设计的可行性与教学有效性。
参 考 文 献
[1]王尔申,于浩楠,徐嵩,等.基于视觉/惯导组合的室内智能小车系统教学实验设计[J].工业和信息化教育,2024,(08):42-45.
[2] 冯 子睿, 王 刚, 邓嘉 钒, 等. 基于 ROS 的智 能车 道偏离 预警系 统设 计 [J]. 装 备制造 技术,2024,(09):164-167+178
基金项目:新能源汽车技术服务新兴产业特色专业(群)(2024cyzyq039);新能源汽车技术专业教学创新团队(2023cxtd191)
作者简介:鲍成(1991-),男,安徽安庆人,讲师。研究方向:智能网联汽车技术,新能源汽车技术。E-mail:245782183@qq.com。

 京公网安备 11011302003690号
京公网安备 11011302003690号


