



- 收藏
- 加入书签

基于ARIMA-HMM的重型载货汽车防侧翻安全性研究
摘要:侧翻是重型载货汽车(尤其为牵引-半挂与大货车)交通事故中造成严重人员与财产损失的重要类型。为实现对车辆侧翻风险的早期识别与趋势预警,本文在仿真平台 TruckSim 与 MATLAB/Simulink 联合仿真框架下,提出并验证了一种基于 ARIMA(自回归积分滑动平均)与 HMM(隐马尔可夫模型)相结合的阶梯式险态辨识与预测方法(以下简称 ARIMA-HMM 方法)。基于仿真工况与部分实车数据的离线验证表明:所提方法在复杂弯道、载荷突变与低附着等工况下,能以较高准确率识别险态并实现约 0.8–1.5 s 的平均提前预警时间,为驾驶员预警或主动控制策略提供有效时间窗。
关键词:重型载货汽车;侧翻;TruckSim;HMM;ARIMA;险态辨识
1 引言
重型载货汽车由于车辆质量大、重心高、轴荷分配与货物布置多变,在高速弯道、紧急制动或侧风作用下极易发生侧翻事故。如何在危险状态发生前对车辆行驶状态进行准确识别与短时预测,并及时向驾驶员或车载控制系统发出预警,是提高道路运输安全的重要研究方向。现有研究方向主要包括:基于物理动力学模型的侧翻临界判据、基于统计/机器学习的危险状态识别、以及仿真+实车联合验证方法等。HMM 类模型因其处理时序、隐状态转换与观测不确定性的天然优势,在驾驶行为与车辆工况识别上已有广泛应用;ARIMA 类时间序列模型在短期趋势预测上稳定且易于实现。将二者结合,能够兼顾状态辨识的离散分类能力与趋势预测的连续时间特性,从而为防侧翻提供多层次的决策支持。
2 仿真平台与动力学建模
ARIMA-HMM 方法首先利用 TruckSim 构建 5 自由度整车动力学仿真模型并生成多工况数据;在分运动层面以 GM-HMM(基于分运动特征的 HMM)对轮胎侧偏、横摆、侧倾等局部危险征兆进行识别;在整车层面以 DHMM(整车危险状态 HMM)进行整体危险等级判定;同时对关键时序指标采用 ARIMA 进行短时趋势预测并与 HMM 输出联合决策,实现对侧翻危险的提前预警。
2.1 仿真平台选择与搭建
为获取可控且高保真的车辆动力学数据,本文采用 TruckSim 作为车辆动力学核心仿真环境,并通过其与 MATLAB/Simulink 的联合接口实现数据交换与在线算法验证。TruckSim 为商业化车辆动力学仿真软件,广泛用于重型车辆、多轴车辆与半挂列车的动态仿真研究,具备多物理场参数库与多种道路、轮胎模型支持,适合开展侧翻机理分析与控制策略仿真验证。
基于 TruckSim,本文建立了典型 6×4 或 8×4 等重载货车的整车模型,并在 Simulink 中封装 HMM 与 ARIMA 算法模块,构建联合仿真-离线验证平台。车辆总质量设定为 31t,货箱最大载荷 20 t。车辆其它基本参数为轴距(1-2 轴 / 2-3轴:1.8 m / 1.35 m、重心高度(满载):1.42 m、轮距(前/后):1.96 m / 1.85 m、悬架类型:钢板弹簧悬架、轮胎型号:11.00R20、制动方式:气压鼓式制动。其中,重心高度与货物分布关系为侧翻研究的重要参数,TruckSim 将货物质量附加至车身刚体模型中,并通过质心变化实现质量重分布。
2.2 五自由度整车动力学模型
为兼顾模型复杂度与仿真效率,本文采用含纵向、横向、横摆、侧倾与车架弯曲/车轮纵向动力学影响的五自由度(5-DOF)集中参数模型。关键动力学方程包括:纵向/横向平动、横摆角速度方程与侧倾动力学方程,并对轮胎侧偏力采用非线性 Pacejka(MagicFormula)或 TruckSim 内置轮胎模块进行建模,以准确反映轮胎侧向力随侧偏角、正向载荷与附着系数变化的非线性特征。模型的主要状态量包括车速 u、横向速度 v、横摆角速度 r、侧倾角?与侧倾角速度?ሶ。整车动力学方程在 TruckSim 中建立并通过不同工况生成时间序列观测数据(采样频率至少 50 Hz,便于捕捉快速动态过程)。
2.3 装载与道路工况设计
侧翻风险受载荷分布、货物纵向/横向偏置、牵引车辆转向输入以及道路半径/附着条件等影响显著。例如选择四川省雅西高速(G5 京昆高速的一段)作为建模对象,其具有典型的山区高速特征:连续弯道、大纵坡、弯道半径变化不规律,适于测试极限工况。道路关键参数如下:典型弯道半径 200–460 m,最大纵坡 3.7% ,典型横坡 2–6%,车道宽度 3.75m ,路面附着系数(干/湿) 0.8 / 0.45。通过将这些实际道路属性数据导入 TruckSim 工具,可生成具有真实曲率、坡度和横向倾斜参数的道路模型,实现高仿真精度的人车路耦合环境。具体在仿真设计中考虑如下影响因子并形成参数化工况库:
表1 装载与道路工况影响因子

通过系统采样上述工况并记录横摆、侧倾、轮胎侧偏角、轮载变化、轮胎侧向力等指标,为后续 HMM 与 ARIMA 的训练提供多样化数据库。
3 ARIMA-HMM 阶梯式识别与预测方法3.1 方法总体结构本文采用分层思路形成 ARIMA-HMM 体系:
(1)低层(分运动层):GM-HMM,对来自 TruckSim 的多通道观测序列(如轮胎侧偏角、轮载、横向加速度、横摆角速度、侧倾角等)进行聚类分态与隐状态估计,识别局部“分运动危险征兆”;
(2)高层(整车层):DHMM,将低层输出映射为整车离散危险等级(正常、注意、危险、临界),并实时估计状态转移概率;
(3)预测层:ARIMA,对关键连续量(如横摆角速度 r(t)、侧倾角?(?)或侧倾率)进行短时 (ζ0.5-2s) 预测,结合 DHMM的隐状态转移概率给出联合早期预警判据。
该结构兼顾了 HMM 的序列识别能力与 ARIMA 的短期数值预测能力,利于在隐含随机性下做出及时可靠的预警决策。3.2 GM-HMM(分运动识别)
在分运动层,首先对多传感通道进行特征工程与预处理:去除直流偏置、带通滤波以抑制低频漂移与高频测量噪声、归一化处理后构造观测向量??。使用 K-means 对历史样本进行聚类,自动确定观测空间的若干观测簇(对应不同程度的局部异常),随后以这些离散观测或连续特征输入到 HMM 的观测概率分布建模中(连续概率采用高斯混合模型 GMM 做为观测概率,故称 GM-HMM)。GM-HMM 的训练采用 Baum-Welch 算法(前向-后向)估计模型参数(初始概率、转移矩阵、观测混合参数),并以交叉验证选择合适的隐状态数目。
GM-HMM 的输出为每个时刻各隐状态的后验概率 P(St=i|O1:t) ,以及基于维特比算法得到的最可能隐状态序列,用以指导高层 DHMM 的输入。
3.3 DHMM(整车危险判定)
高层 DHMM 以 GM-HMM 的隐状态概率或编码为观测输入,建立整车层级的隐马尔可夫链,其状态集为离散危险等级  、H2 注意、H3 危险、H4 临界}。DHMM 的转移矩阵反映从正常到危险的演进概率,观测概率反映低层输出与整车等级的对应关系。DHMM 同样采用 Baum-Welch 进行离线训练,并在仿真/实车数据上进行在线滤波,实时输出最可能的整车等级与状态转移概率,从而实现危险识别。
、H2 注意、H3 危险、H4 临界}。DHMM 的转移矩阵反映从正常到危险的演进概率,观测概率反映低层输出与整车等级的对应关系。DHMM 同样采用 Baum-Welch 进行离线训练,并在仿真/实车数据上进行在线滤波,实时输出最可能的整车等级与状态转移概率,从而实现危险识别。
.4 ARIMA 短时预测与联合决策
对于容易出现急剧上升趋势的连续指标(例如侧倾角?、横摆角速度r),采用 ARIMA(p,d,q) 模型进行短时预测。模型参数通过 AIC/BIC 指标在训练集上选取,并对残差进行白噪声检验以保证模型有效性。ARIMA 给出的预测区间(置信区间)结合 DHMM 的隐状态转移概率,可形成联合风险评分函数:
\[Risk\score(t+\Delta t)=w_1 \cdot P{DHMM}(H_{danger}|t) + w_2 \cdot \frac {\hat{x}(t+\Delta t)-x_{crit}}{x_{crit}}\]
其中ො?(? + Δ?)为 ARIMA 对关键量的预测值, xcrit. 为该量的临界阈值, w1,w2 为权重(可由 ROC 曲线或代价敏感学习确定)。当????_?????超过预设门限时触发预警;若????_?????超过更高门限,则可触发主动干预建议(如减速、限制转角、侧向制动等)。
4 仿真设计与离线验证
4.1 数据集构建与训练流程
基于 TruckSim 生成的数据库包含数百次仿真测试,每次测试包括若干秒-数十秒的时间序列数据(采样率 50–100 Hz)。训练集覆盖正常与多种危险工况(超速弯道、载荷偏置、低附着、横风、制动-转向耦合等),测试集包含交叉验证样例与若干实车试验数据(用于外部验证)。训练流程如下:
(1)数据预处理:滤波、归一化、特征提取(如侧向加速度峰值、侧倾率斜率等);
(2)分运动聚类(K-means)确定观测簇;
(3)GM-HMM(GMM 观测)训练与交叉验证;
(4)DHMM 训练(使用低层输出作为观测);
(5)对关键时间序列训练 ARIMA(单变量或多步预测);
(6)通过仿真测试集评估识别准确率、提前预警时间与误报率。
4.2 验证工况与指标
验证工况包含:S 弯道(不同速度、不同超高)、载荷突变(车辆在弯道中货物侧移)、低附着突变(干到湿、湿到结冰)、侧风脉动(持续或突发)、驾驶员急转向避障情形。
评估指标选取:识别准确率(Accuracy)、查准率(Precision)、查全率(Recall)、F1 值、平均提前预警时间(Mean Advance Warning Time)、误报率与漏报率,并采用混淆矩阵与 ROC 曲线对识别门限进行敏感性分析。
5 结果与分析
5.1 识别性能
在仿真测试集上,GM-HMM 对分运动(如前/后桥侧偏、侧倾变化)识别准确率平均约 92%(不同工况下 88%–96%),DHMM 对整车危险等级分类准确率约 89%(F1 值 0.88)。在某些极端低附着工况或载荷突变时,低层观测噪声增大,导致识别准确率略下降,但整体仍能保持较高的辨识能力。
表 2 ARIMA-HMM 模型侧翻险态识别评估
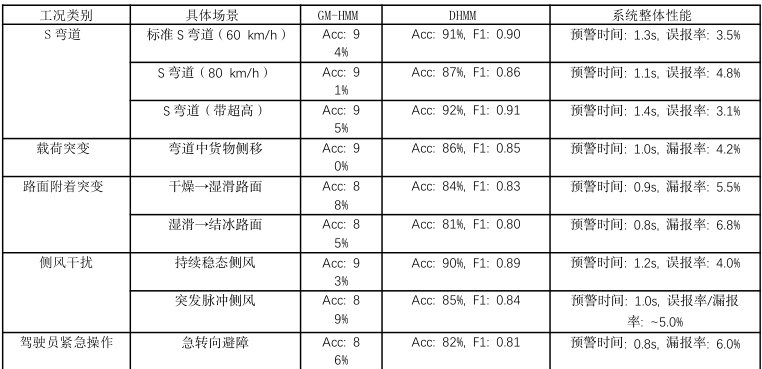
注: Acc = 识别准确率(Accuracy);所有评估均为仿真测试集上的离线验证结果。
5.2 提前预警能力
ARIMA 对关键连续量的短时预测(预测步长 0.5–2 s)在大多数工况下提供了 0.8–1.5 s 的平均提前量——这为驾驶员接收提示并进行纠正动作或为主动控制算法留出反应时间提供了可利用窗口。联合风险评分方法相比单纯 DHMM 触发预警能进一步降低漏报率并提高预警稳定性。
5.3 误报与鲁棒性分析
误报主要发生在:高速切换工况(比如突发制动-转向耦合)导致观测短时异常但未进入危险演化;以及低 SNR(信噪比)场景下传感器数据偏差造成误判。通过对观测通道加权、引入观测可信度评估以及在风险评分中增加置信区间因子,可有效降低误报率。若结合摄像头/激光雷达等外部感知实现多传感器融合,鲁棒性可进一步提升。⸻
6 结论与展望
本文提出了一种基于 ARIMA-HMM 的重型载货汽车防侧翻预警方法,并在 TruckSim-Simulink 联合仿真平台上进行了仿真验证。结果表明:在多工况下该方法具有较高的识别准确率与可观的短时提前预警能力(典型提前量约 0.8–1.5 s),为驾驶员提供时间冗余或为主动稳定控制提供触发条件。
未来工作可从以下方向展开:(1)引入深度时间序列模型(如 LSTM/Transformer)与 ARIMA 的混合预测以提升非线性场景下的预测精度;(2)采用多传感器数据融合(IMU、轮速、摄像头、雷达)增强鲁棒性;(3)在真实道路大样本实车试验中进一步验证并以真实事故/临界事件数据对模型进行强化学习与在线自适应更新。
参考文献:
1. 高伟嘉.基于 ARIMA-HMM 的半挂汽车列车险态辨识与预测研究[D].重庆交通大学, 2021.
2. TruckSim. TruckSim — Truck dynamics simulation and commercial vehicles. Mechanical Simulation / Applied Intuition.3. Boyi Liu, Xiangyan Tang, Jieren Cheng, Pengchao Shi. Traffic Flow Combination Forecasting Method Based on Improved LSTM and ARIMA. arXiv:2016.10407.4.,徐延海,朱鹏兴,李爽,唐云飞.基于 Trucksim 整车操纵稳定性影响参数的研究[J].郑州大学学报(工学版),2020,41(01):13-19.
本文系 2023 年湖南省教育厅科学研究项目一般课题:基于 ARIMA-HMM 的重型载货汽车侧翻预测研究(课题编号:23C0645)成果之一。

 京公网安备 11011302003690号
京公网安备 11011302003690号


