



- 收藏
- 加入书签

基于激光雷达和 AI 视觉的多旋翼室内无人机巡检系统研究与实现
摘 要:本文对多旋翼室内无人机巡检系统的关键技术进行了研究,包括在巡检过程关键的定位技术和避障技术进行了研究,给出了基于多源传感器融合的三维定位技术的具体流程,进一步介绍了巡检系统软件平台的开发设计及实现,并通过实际飞行应用测试对本文提出的定位和巡航技术进行了综合验证,取得了良好的效果。
关键词:激光雷达;AI视觉;无人机
中图分类号:TP29 文献标识码:A 国家标准学科分类代码:12099
0 引言
随着无人机技术的发展,无人机在智慧巡检、环境监测、公共安全等领域得到了广泛应用。场景的多样化使得多旋翼无人机也要适应不同的环境,特别是在室内 GPS 信号差和光照不良的情况下,无人机在室内自主导航时需要凭借激光雷达、视觉传感器和其它传感器融合的方式来进行导航评估[1],并利用数字孪生技术实时展示无人机飞行轨迹,实现指定任务自动巡航、巡检分析与异常展示告警,提升无人机的自主化和行业的智能化。
本文重点研究基于激光雷达和 AI 视觉等多源传感器融合下的多旋翼室内无人机导航定位和路径规划技术,以增强定位的可靠性和准确性。通过将多种传感器的数据进行融合,使得无人机在复杂室内环境下能够实现高精度的自主导航和定位飞行,并根据环境信息进行智能避障,实现无人机的智能飞行,同时设计开发多旋翼室内无人机自主巡检管理系统,通过对全局地图进行分析,找出多旋翼室内无人机的可飞行区域,利用时变势场法实现多旋翼室内无人机的室内飞行与路径规划[2],从而完成其他复杂巡检任务。
1 基于激光雷达和 AI 视觉的多旋翼室内无人机巡检系统设计
1.1 总体方案
为了实现多旋翼室内无人机自主导航定位和避障飞行,系统融合了三维激光雷达、AI 视觉技术,以及多源传感器、路径规划、防碰撞等技术,使多旋翼室内无人机能够实时采集周围环境信息[3],并且依据 AI 视觉技术进行特征识别和目标跟踪,确定障碍物的位置及障碍物四周的开阔程度,实现无人机飞行过程中的自动避障,并结合管理中心系统,在调度巡检管理平台上,利用数字孪生和人工智能技术,实现无人机的飞行轨迹和巡检状态实时展示,自动巡检、结果分析与异常预警处理,实现全面室内巡检的自动化和数字化。系统总体架构如图 1 所示。
图 1 系统总体架构
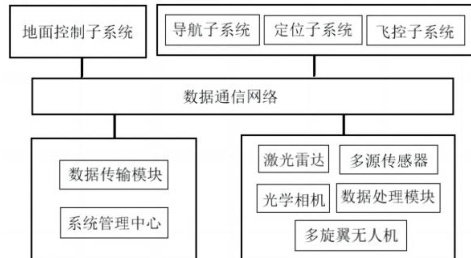
多旋翼室内无人机巡检系统的硬件部分,主要包括系统管理中心和用于通信的数据传输模块,多旋翼室内无人机及其搭载的激光雷达、光学相机、数据处理模块、其它传感器等。其中激光雷达,主要是实现定位和探测障碍物。而超声波模块作为辅助,通过使用超声波弥补在某些特定环境下激光失能时作为替代设备。通过搭载激光雷达,并选择合适的数据处理和导航算法[4],多旋翼室内无人机实现了室内环境下厘米级的定位,并在复杂室内环境实现了飞向目标点的任务规划。
数据通信网络主要负责各子系统、系统管理中心与多旋翼室内无人机端进行通信,接收多旋翼室内无人机端发来的信息,并将多旋翼室内无人机的具体信息传送给操作界面模块进行可视化展示。
地面控制子系统包括通信模块、操作界面模块、地图交互模块,主要用于发送导航、起飞及降落等各种指令,以及显示无人机发送的当前状态等情况。
导航子系统用于执行自主导航飞行,定位子系统即实时展示当前的位姿信息。
飞控子系统使用无人机自有系统,通过调用各种 API 接口控制无人机执行相应的飞行动作[5]。
多旋翼室内无人机导航环境为三维空间,因此选用三维激光雷达最合适,其出色的三维空间扫描技术能够实现环境建模、激光测距等功能。通过激光扫描器完成三 间的感知,并计算出环境中的点云数据,实现多旋翼室内无人机感知周围环境,由此多旋翼室内无人机可以通过感知到的环境进行点云匹配准确达到定位的目的,并且通过激光测距防止碰撞到室内障碍物。
基于项目的需要,选用 DJIM600 多旋翼无人机搭配相关设备,同时结合机身搭配的多种传感器和其提供的开源 SDK 进行系统的开发。数传电台通过先进的数字信号处理技术以及无线电发射技术实现高效率的数据传输能力,使多旋翼室内无人机与地面管理中心实现高效稳定的数据传输[6]。
1.2 关键技术
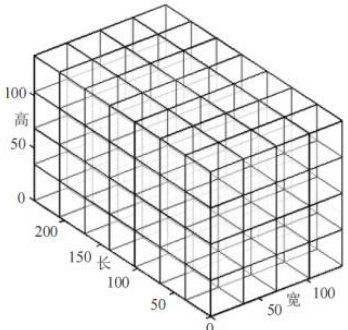
综合定位导航技术:针对室内无人机定位导航的难题,将采用综合定位导航技术,将视觉导航、激光雷达 SLAM 和多传感器融合等方法相结合,实现高精度、高鲁棒性的室内定位。通过传感器数据的多源融合,以及智能算法的优化,获得无人机的定位信息进而计算出其在空间中的 3D 位置,为了后续的路线规划及避障算法需要,将立体空间划分成固定大小的网格空间,无人机导航所用地图依赖于此网格空间[7],每个网格为地图中的一个点,使得无人机能够在复杂的室内空间中准确的进行定位和安全、稳定地进行飞行和任务执行,如图 2 所示。
图 2 室内空间网格划分示意图
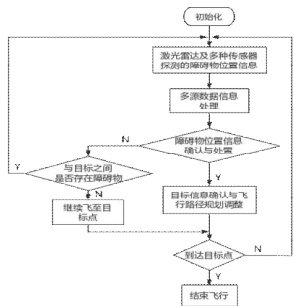
无人机导航和避障问题是室内无人机实现自主飞行的基础,在飞行过程中,无人机通过所安装的三维激光雷达、光学相机及其它传感器数据融合的方式来进行导航评估,并利用数字孪生技术,获取障碍物与飞行目标相对于无人机的距离及位置信息来判断避障的紧急程度,通过避障路径规划算法确定下一避障导航点,然后按照飞行控制实现点到点的飞行来完成自主避障飞行,直至到达目标点,导航与避障系统流程如图 3 所示。
图 3 导航与避障系统流程
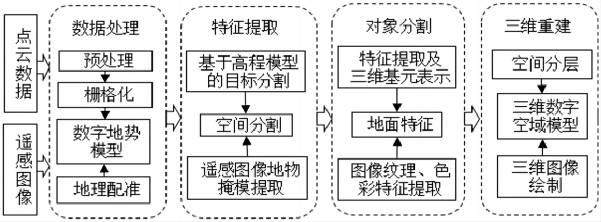
数字孪生技术的应用:将数字孪生技术应用于巡检平台,通过构建准确的三维数字孪生模型,实时展示无人机的飞行轨迹和巡检状态。数字孪生技术将实现无人机飞行过程的实时监控和可视化展示。数字孪生技术的应用使得无人机的管理和控制更加智能化和自动化,大大提高了无人机的任务执行效率和安全性。三维数字孪生模型构建流程如图 4 所示。
图 4 三维数字孪生模型构建流程
人工智能技术:通过对室内环境的深度学习和建模,实现智能路径规划。基于环境数据和目标要求,无人机能够自主规划最优飞行路径,实现高效巡检和定点任务;结合传感器技术和深度学习 ,实现对障碍物的实时感知和识别;在遇到未知区域时,能够根据环境信息和历史数据进行 ,找到最优路径继续巡检任务,利用深度学习和视觉技术[8],对巡检过程中获取的图像进行实时识别和分析,通过图像识别,能够准确发现异常状况,提供及时准确的巡检结果分析报告,并利用深度学习的强大数据处理和学习能力,通过对历史飞行数据和室内环境进行大规模数据分析,优化飞行路径规划算法,提高无人机的飞行效率和准确性。
智能巡航与异常检测:在人工智能和数字孪生技术的支持下,实现行业的智能巡检和异常检测。通过数字孪生模型对无人机飞行过程进行实时监控[9],巡检平台能够在无人值守的情况下,完成指定巡检任务并进行异常检测告警。
2 多旋翼室内无人机导航巡检系统平台设计
为了增加多旋翼室内无人机的实用性,本系统不仅包含多旋翼室内无人机及其搭载设备,同时也需要开发设计多旋翼室内无人机巡检管理系统平台,以更好的实现室内无人机的安全飞行监视、巡检状态展示和应用管理服务,为行业用户提供方便快捷的信息和应用服务,包括飞行器管理、规划飞行任务和路线、智能巡检结果、数字孪生展示大屏等应用。
2.1 平台设计
平台设计根据系统功能层次划分为:基础信息接入层、数据中心平台层、用户应用层三个部分。
基础数据接入层:主要包括飞行器登记认证系统、飞行任务、飞行器飞行监视和监测系统、飞行器通信服务系统、气象地理环境等信息服务系统、实际环境 3D 模型、物联网设备接入系统等基础信息数据的接入。各部分功能如下。
认证系统,主要是对飞行器和飞行器用户进行实名认证准入制度,从生产厂家源头或后期加装认证模块。认证模块为小型轻量化装置,可外置或集成安装在室内飞行器上,主要由身份认证芯片、北斗导航或GPS 定位芯片、无线射频通信或 4G/5G通信模块、MCU(微控制单元)等组成。实现对飞行器飞行前的认证和飞行过程的全程监控。
监视监测系统,主要包括自主报告和被动式探测感知系统作为监测和管理设施,采用激光雷达、电磁、频谱扫描、音频、视频等多方式协同探测的手段,通过多种侦测装备协同互补的工作,建立“一点发现,多维跟踪”、多种侦测方式相结合的全天候、全方位探测系统,可及时获取目标位置、视频图像、操控无线电频率等多种信息。
通信服务系统,主要是飞行器与交通管理平台的信息通信系统。飞行器需要加装北斗导航、Wifi/4G/5G 通信、无线通信、卫星通信等多种通信模块,飞行器正常情况下可以使用 Wifi/4G/5G 通信,在没有 Wifi/4G/5G 通信时使用北斗导航、无线射频通信、卫星通信等通信方式以保障飞行器能够始终保持通信联系。
数据中心平台层:主要是各种信息数据的综合管理和系统相关数据的监控与安全处理,为系统各种业务提供数据支撑和保障。各部分功能如下。
数字孪生基础数据,主要是平台本身所需要的基础性数字孪生数据信息,包括系统软件数据库、系统运行平台、数字孪生模型数据、空间相对坐标数据等[10]。
业务智能分析基础数据,主要是根据业务需要进行数据分析的模型信息。
业务数据,主要是根据业务需要的数据信息,包括飞行器相关数据、飞行计划、业务巡检分析主题分析数据,主要是根据系统主题需要生成的巡检分析以及异常的管理图表记录等数据。
数据中心平台层各分类中心,主要是指数据中心平台层需要的包括网络、数据存储、安全管理,硬件和软件等各种分类,数据中心是一整套复杂的设施。它不仅仅包括计算机系统和其它与之配套的设备(例如通信和存储系统),还包含冗余的数据通信连接、环境控制设备、监控设备以及各种安全装置。
用户应用层:主要是室内无人机巡检平台的具体业务应用平台,包括飞行器安全飞行的诱导和动态监测管理、飞行器飞行控制、飞行器飞行轨迹的绘制、物联网管理等综合管理应用平台,智慧自动巡检平台,主要是为行业用户提供方便快捷的信息和应用服务,包括飞行器管理、规划飞行任务和路线、智能巡检结果、三维可视化展示等应用。各部分功能如下。
飞行器安全飞行诱导和动态监测管理,主要是室内无人机管理,包括飞行计划,飞行机型、飞行时段、飞行区域、飞行高度、飞行速度、飞行任务等信息,监管系统对无人机进行飞行引导和实时动态监测管理。
飞行器飞行控制,主要是对室内正在飞行的飞行器可能存在的安全事件进行违规告警,必要时实施飞行干预。
飞行器飞行轨迹的绘制等综合管理应用,主要是飞行器飞行轨迹可以实现可视化显示:集成 GIS(地理信息系统),基于数字孪生的构建 3D 模型界面上显示矢量图[11](可自由缩放),可实时监控空中飞行器的方位、速度、高度和航向,防止它们发生碰撞或者飞入“禁区”。可以显示低空飞行器基本信息、当前操作人员以及详细飞行状态等。
参考文献
[1] 曹美会,鲜斌,张旭.基于视觉的四旋翼无人机自主定位与控制系统 [J]. 信息与控制,2015, 44(2): 190-196.
[2] 倪磊,曾庆化.依靠自身传感器的室内无人机自主导航引导技术综述[J].计算机应用与软件,2012,29(8):l60—l63
[3] 钟佳朋.四旋翼无人机的导航与控制[C].哈尔滨工程大学,2010
[4] 李昀泽.基于激光雷达的室内机器人slam 研究[D].华南理工大学,2016,1-2

 京公网安备 11011302003690号
京公网安备 11011302003690号


