



- 收藏
- 加入书签

全电控正流量液压挖掘机启动压力冲击研究
 打开文本图片集
打开文本图片集



摘要:挖掘机是工程机械领域一种常用机型,具有良好的可操作性和经济性,是机械领域研发重点。在技术不断改进与成熟过程中,生产领域开始广泛应用全电控正流量液压挖掘机,但此类挖掘机其执行机构在启动环节面临较大的压力冲击。为改善这一现状,本文结合液压挖掘机器动力系统概述还有系统原理进行数学建模,并研究匹配方案,进行仿真验证,结果证明在启动环节使主阀阀口开度、正流量泵其具体输出排量还有卸荷阀对应的阀口开度相互匹配,可在启动环节使执行机构明显降低压力冲击,使设备启动具有更好的平稳性。
关键词:全电控;正流量;液压挖掘机;启动;压力冲击
一、前言
近年来,挖掘机日渐趋于大型化、智能化,先导控制方式也逐渐变成电比例减压阀以及电控手柄等,目前大部分挖掘机所建立的系统为正流量开中心系统,启动环节主要通过旁路节流调速来调节系统压力,容易在启动环节出现不协调问题,导致压力冲击过大。本文主要提出挖掘机启动过程中使外负载力、卸荷阀其阀口开度还有变量泵其对应的输出流量保持定量匹配关系,并基于此建立数学模型,通过优化控制程序缓解启动中的压力冲击问题,使系统具有更高的抗负载性能。
二、液压挖掘机动力系统概述
对于液压挖掘机来说,其动力系统主要包括电气系统、电控系统、液压传动系统、发动机系统等。其中,发动机系统属于动力源,是把化学能转成机械能,在相关能源驱动下促进液压泵运转。而液压传动系统是由液压油箱、油缸、马达、先导操纵阀、多路控制阀、液压泵等组成的。液压传动系统、发动机系统共同传递挖掘机能量,具体是发动机基于扭矩及输出转速促进化学能向机械能转化,在液压泵的作用发挥下,使机械能转成液压能,在其驱动下促进执行机构发出动作[1]。而执行机构其具体动作形式是由多路阀所控制的,并通过执行机构把液压能转成机械能,满足作业需求。电控和电气系统在挖掘机中主要发挥监测及控制功能,同时挖掘机通过应用CAN总线技术可使机械操作更加智能化。
三、全电控正流量液压挖掘机系统原理
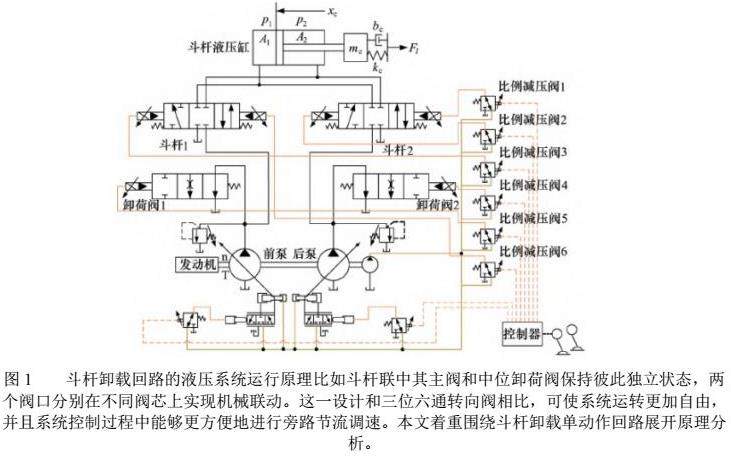
对于全电控正流量挖掘机来说,其液压系统原理可见图1。
图1 斗杆卸载回路的液压系统运行原理比如斗杆联中其主阀和中位卸荷阀保持彼此独立状态,两个阀口分别在不同阀芯上实现机械联动。这一设计和三位六通转向阀相比,可使系统运转更加自由,并且系统控制过程中能够更方便地进行旁路节流调速。本文着重围绕斗杆卸载单动作回路展开原理分析。
电控手柄调整到中位之后,前泵以及后泵其排量都是最小值,而卸荷阀1和2有着最大的阀口开度,与此同时,斗杆1和2其多路阀的阀芯也保持在中位部位,泵口的液压油会通过卸荷阀向油箱当中回流。而在斗杆卸载电控手柄做出动作的时候,前泵以及后泵其流量也会发生变化,具体是在斗杆卸载先导手柄不断增加压力过程中,流量也趋于上升,而且卸荷阀其阀口会逐步关闭,此时斗杆1和2相应阀口将逐步打开。启动液压缸之前,旁路当中的节流调速系统主要发挥着系统压力调节作用,如果卸荷阀对应阀口提前关闭,那么启动环节不再通过旁路节流调速,而是由进油口完成节流调速任务,这种情况下系统其冲击会从柔性转为刚性。另外在主泵端流量不断增加过程中,需要及时开启主阀的阀口,如果阀口打开过迟,容易导致主泵端憋压,而且如果卸荷阀阀口没有及时关闭,将延长系统的建压时间,此时在泵口部位所分布的油液会通过卸荷阀逐渐流向油箱,从而浪费能量,并会对执行机构其动态响应性能产生一定影响[2]。综合分析,主阀阀口以及卸荷阀阀口相应开度和变量泵其出口部位的流量保持一定匹配关联。
四、数学建模
输入电流和控制变量泵、卸荷阀相应电比例减压阀具体输出压力以及多路阀相互之间为线性关系,据此可建立数学模型:
在公式(1)当中,pp代表的是减压阀其具体输出压力,单位是MPa;K1代表电比例系数,单位是MPa/mA;I1代表控制器所输出的电流,单位是mA;b1代表偏置量。
因为液动力、阻尼力以及弹簧力等多种力量会在运动期间对卸荷阀阀芯以及多路阀阀心产生影响,所以可建立以下受力平衡方程,即:
在公式(2)当中,pp代表减压阀具体的输出压力,单位为MPa;△S代表先导腔对应的受力面积,单位为m2;Ks代表弹簧的刚度,单位是N/m;xv代表阀芯位移,单位m;FN代表弹簧预紧力,单位N;mv代表阀芯质量,单位kg;t代表阀芯位移时间,单位s;Bv代表阀套、阀芯彼此黏性摩擦系数,单位N·s/m;Kf代表稳态液动力刚度,单位N/M。
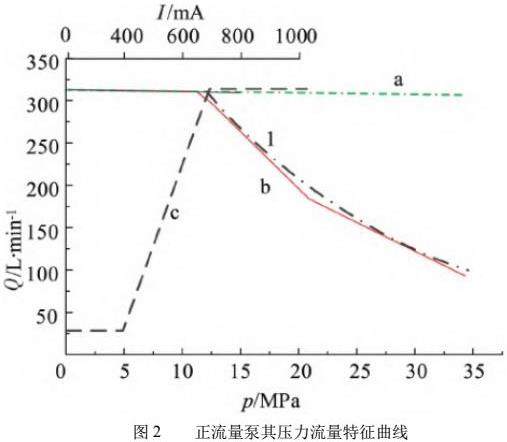
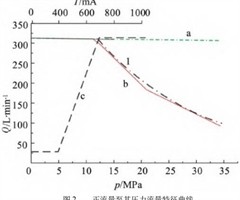
启动液压缸之前,正流量泵会经卸荷阀使液压油回流至油箱当中,如果将油箱回油压力设成0MPa,那么正流量泵其所输出的流量还有中位卸荷阀所保持的阀口开度都会直接影响系统压力[3]。基于正流量泵其控制运行原理,并结合挖掘机应用中所面临的工况,综合分析后可发现执行机构在启动环节如果发动机保持固定档位,同时变量泵为正流量,那么可用图2当中的c曲线反映电量输出泵所输出的流量和控制器所输出的电流两者关系。
在图2当中,恒流量曲线为a曲线,恒功率曲线为b曲线,理想状态下的恒功率曲线为1曲线。结合c曲线,可明确变量泵其所输出的流量为正流量时和控制器其所输出的电流相互之间的关系,并可基于此建立启动压力缸时的函数模型。
五、匹配方案与仿真
本文主要围绕斗杆卸载分析匹配方案。斗杆卸载对应的先导手柄在做出动作时,通过控制器功能使手柄信号变成虚拟的斗杆主阀先导压力值,相应虚拟压力值主要是控制器结合手柄动作对应电信号,通过有效处理后控制执行机构。首先,先导压力值在实现转化之后,会通过电流方式传递至斗杆联上所分布的比例减压阀,由此打开其中的主阀芯。其次,控制器可基于虚拟压力值自动化地生成虚拟的卸荷阀先导压力值还有前泵和后泵的虚拟排量值,由此分别对卸荷阀对应的阀口开度以及主泵排量加以控制,促使卸荷阀对应阀口开度、前泵以及后泵实际输出排量还有斗杆联其主阀部位的阀口开度相互匹配。
通过分析虚拟的卸荷阀对应先导压力值(px)还有电量泵虚拟排量值(V),同时结合斗杆卸载其回路的控制运行原理,可发现px还有V都属于虚拟的主阀先导压力值(pz)对应函数。根据上述公式,可发现在手柄信号趋于上升过程中,主阀的阀口会不断被打开,也就是斗杆油缸大腔当中的压力油会逐渐流回油箱当中,与此同时,变量泵将不断加大输出流量,此时卸荷阀也会不断缩减阀口开度。在主阀其先导压力逐渐上升至虚拟值pz1的时候,泵排量值会上升至V1,如果卸荷阀其虚拟的先导压力值上升至 px1,此时斗杆油缸当中的小腔压力会逐渐上升至启动压力,同时会按照一定加速度快速启动。
而在实践当中,卸荷阀和变量泵相比,前者响应远高于后者,如果主阀有着相同的虚拟先导压力值,那么实际中变量泵其排量曲线会比虚拟曲线滞后,因为卸荷阀具有较快的响应速度,所以可视作卸荷阀其阀芯的动态位移响应和虚拟先导压力值曲线没有较大偏差,在不考虑这一因素情况下,如果主阀的虚拟先导压力值达到pz1,此时变量泵排量实际值比V1偏小,这样会对旁路节流调速产生负面影响,无法获得理想效果。
所以对变量泵排量还有卸荷阀先导压力相对应的虚拟值曲线进行改进,改进之后即便挖掘机会有不同的负载,卸荷阀对应的阀口开度、变量泵其具体排量还有主阀的阀口开度始终可以找出一组相互匹配的数值,若将主阀其虚拟的先导压力值设成pz2,而且主阀超越死区,此时使相关变量泵保持V1排量,同时把卸荷阀其虚拟先导压力值设成px1,结合上述公式,可发现斗杆卸载对应的小腔压力上升至一定启动压力之后,将按照一定加速度保持加速启动状态。
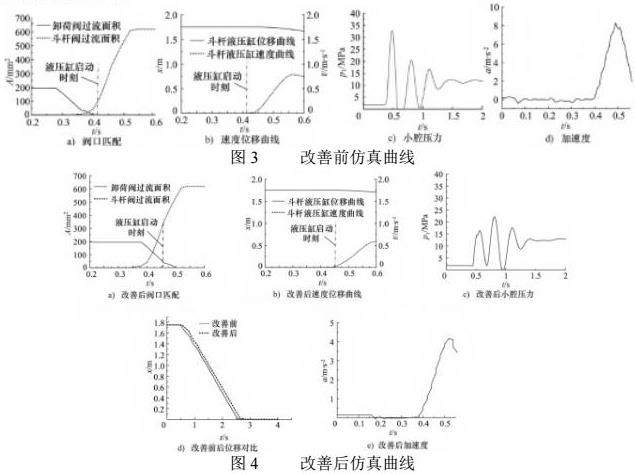
在仿真验证中,主要将某企业的全电控正流量液压挖掘机(37t级)视作研究对象,进行仿真建模,分别通过不同的软件对机械系统还有液压系统实现三维建模,并进行校核。改善前仿真曲线为图3,改善后仿真曲线为图4。
经联合仿真,得出该挖掘机在启动环节其所受到的冲击压力下降超30%,并且执行机构具有更明显的启动特征。
六、结束语
全电控正流量液压挖掘机因为在启动环节面临严峻的压力冲击问题,所以会对启动稳定性产生一定影响,为改善现状,本文主要通过理论分析和原理探究,提出让主阀口、变量泵其所输出的流量还有卸荷阀对应阀口开度相互匹配,由此在启动环节缓解压力冲击,优化启动特性。
参考文献:
[1]赵焕玲.一种单斗液压挖掘机实训台的故障码设计探讨[J].现代机械,2021(03):69-73.
[2]刘畅,孙健,石端虎.液压挖掘机工作装置的动力学建模与分析[J].机床与液压,2021,49(07):156-159.
[3]龙亚.基于多学科联合仿真的液压挖掘机挖掘阻力研究[J].内燃机与配件,2021(05):18-19.

 京公网安备 11011302003690号
京公网安备 11011302003690号


