



- 收藏
- 加入书签

自平衡系统在无人驾驶帆船中的应用
 打开文本图片集
打开文本图片集

摘要:无人驾驶帆船在极端气象、海况、污染等不利条件下的人类海洋活动中日渐凸显优势。本文瞄准这一趋势,对目前世界上成熟、可靠、先进的若干型无人驾驶帆船进行研究分析,发现在有主流无人驾驶帆船中普遍存在一大问题——无法良好保持船体平衡。针对该问题作者构想并设计了一套自动平衡系统,可自动感知船体因风的作用产生的倾斜状态,并通过一系列程序控制机械装置,调整船体重心,实现自动调节船体平衡。本文详细记述了该系统的研究和设计过程:在充分研究分析本领域发展现状和主流产品的基础上,通过对多种机械结构有效性与合理性的计算分析,选定硬件系统方案,然后同步设计软、硬件系统,进而在比例模型上开展实验,最终验证了该系统的可行性。本文为该自动平衡系统下一步更深入的研究和在实物中的应用奠定了理论和实验基础。
关键词:无人驾驶帆船;自动平衡系统;重心调整
1.前言
无人驾驶自动帆船是一种新兴的机器人,单纯依靠风提供驱动力,并不依赖其他能源损耗。这对于保护海洋环境,营造一个健康、可持续发展的生态系统有着重要意义。同时,该机器人有着广泛的发展前景。运用它进行海洋生态观测、海洋数据监测有着污染小、噪音小等优势,对海洋生物及生态系统十分友好。而在采用太阳能或是风能发电的情况下,进行长途航行能够不考虑燃油损耗,实现更长时间的续航[1]。
现有的无人驾驶帆船,例如SeaLeon [2] 和Saildrone [3],都具备较为成熟的机械结构和控制系统,能够实现为船只提供数据分析[4]、航线规划[5]、自动避障[6]等多个功能,且已经完成了如横跨大西洋以及对海洋数据的采集等工作任务,但是都存在无法良好保持船体平衡的问题,进一步导致无法在恶劣天气下航行。
船只翻覆是灾难性的,而本文的研究目的就是研究一个平衡系统,使得船只能够在面对各种恶劣天气时最大程度的保持正立,竭力避免翻覆情况出现,以增加船只航行的稳定性和安全性。这个改进对于用于科考的帆船以及用于运输的帆船都是极为有益的。维持船体平衡可以在最大程度上保护船只所携带的探测仪器及设备,或是其运输的货物。将该技术运用于无人驾驶帆船当中还能够使其能够采集恶劣海况的数据,提高科研数据的准确性和完整性。
综上所述,将自动平衡系统加入到无人驾驶帆船当中是必要的,可以令帆船适应更多恶劣天气,控制其倾斜角度,使其更加稳定安全的航行或是提高其航行效率。
2.自动平衡系统机械结构的比较分析及计算
为了让自动平衡系统兼具结构简单、效率高、成本低、可实操性强和环保等多种性质,我们在其硬件结构上探讨了多种不同的方案。该部分列举了两种最具代表性且平衡原理不同的最优方案进行对比,以此得出最终结论,进而选出我们所制作的模拟模型的机械结构。
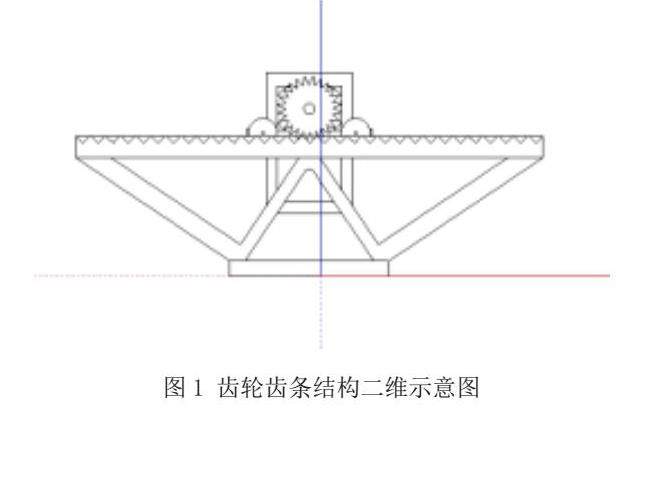
2.1平衡配重实现平衡
如图1所示,该结构由一个电机控制齿轮的旋转角度使电机携带配重在装有齿条的轨道上实现左右自由移动。该结构在工程领域运用广泛,多见于汽车前轮的转向结构[7]。其所能够提供的扭矩与配重质量以及其距中心点距离的关系已于上文说明,可归结为T=m·g·L;而移动距离L又与电机的旋转角度α和旋转半径r呈现L=(α/360)·2·π·r的关系;那么该系统能够提供的扭矩与配重质量、电机旋转度数及齿轮半径的关系就可以总结为T=m·α·r·g·π/180。可以发现,自变量m、α和r与因变量T的关系均是线性的,这使得该系统很便于编程控制。该系统也具有作用方式简单高效、用材少、占用空间相对较小等优势。同时,由于电机与配重是一体的,在驱动配重往船体一侧移动的同时自身也会跟随配重移动,因此电机的质量也可以被算作配重的一部分,可以最大程度减小船体质量不必要的增加。
上述多种优势使得该方案从多种方案中脱颖而出,成为最终所运用到模拟模型中的最终结构。
2.2转子提供扭矩实现平衡
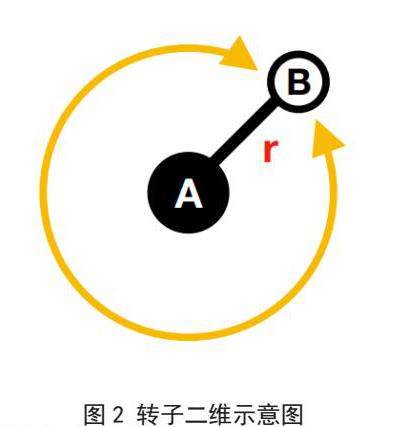
转子,断面如图2所示,为一个电机在圆形轨道外围携带一个或一圈配重B绕电机旋转轴心A进行高速旋转的零件。该通过高速旋转电机以提供扭矩使机械运作的方案也曾被运用于多项研究当中[8]。
根据公式扭矩T等于转动惯性I乘角加速度α(T=I·α)可以得到,当转子加速旋转时会产生一定量的扭矩。理想状态下,若把外圈的配重B想象为一个无体积的点或者圆环,其惯性I等于B的质量m乘旋转半径r的平方(I=m·r2)。因此该转子能够提供的扭矩与配重质量、旋转半径及角加速度的关系可以表示为T2=m·r2·α。
为了能够进行更直观的比较,可以将该公式与上述方案中的配重所提供的扭矩公式T1=L·m·g进行对比。如果令两种方案所能够提供的扭矩相等,即令T1=T2,我们可以得到L·m·g=m·r2·α。若此两方案所携带同质量的配重,则L·g=r2·α,即9.8·L=r2·α。
将制作的模拟模型(后文将进行详细阐述)的数据L=0.1m、r=0.02m代入,可以得到9.8·0.1=0.022·α,解得α等于2450rad/s2。这意味着如果使用该电机制作转子,其角加速度需要达到2450rad/s2才能使该系统所提供的扭矩达到携带同等质量配重的齿轮齿条结构所提供的扭矩。现有电机难以满足α的所需值。
同时,使单个或多个转子持续以高速转动会导致该系统需不间断地为转子提供大量电流和电压供其运行,无疑增加了能源消耗并缩短了其续航时间。相比之下,齿轮齿条结构仅需少量电能驱动电机旋转少量角度携带配重移动小段距离就能够维持船体的平衡,在日后配备了太阳能板或是风力发电机的无人驾驶帆船中,该电能的消耗甚至能够完全实现自给自足,大大增加了帆船的续航时间并将能源消耗几乎降为0。
综上所述,相较于齿轮齿条结构,转子结构效率低、持久性差且消耗能源多,因此也不适合运用于无人驾驶帆船的自动平衡系统中。
3.自动平衡系统的设计与制作
3.1 机械系统
3.1.1机械系统的设计
在依据上文的分析确定了最终采用的硬件结构后,如何验证该方案可行性并将其应用到实物上的实验研究是下一个需要解决的问题。
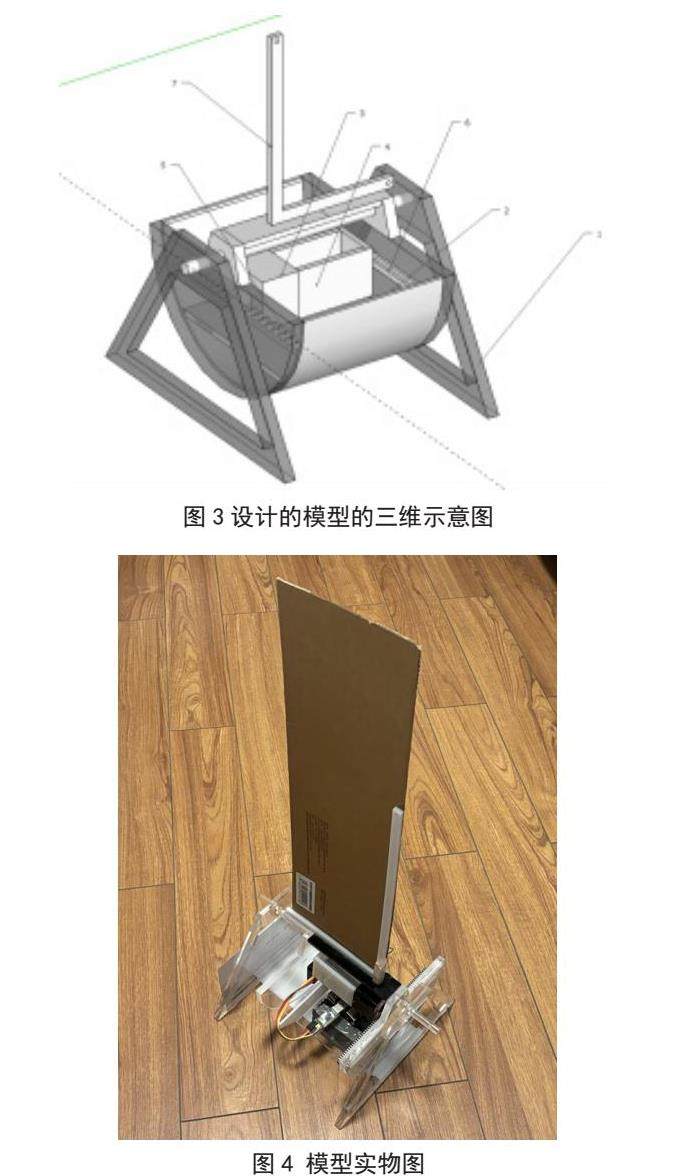
实验初期,购买现有船模进行改装被考虑为一个方案。但是经过测量发现,船模船体部分过于狭小无法装配自动平衡系统,且其需要在水面上进行实验,十分不便,因此从零开始设计了一个模拟模型(见图3)来进行实验研究显然成为更合理的方案。
由于仅需通过实验验证该自动平衡系统能够在船体产生倾斜时维持船体平衡,该模拟模型仅截取了帆船船体的一段进行操作。
模拟模型主要由以下几个部分组成:外部支架(图3 (1))、船体外框(图3 (2))、电机(图3 (3))、配重(图3 (4))、齿轮齿条(图3 (5))、轨道(图3 (6))、船帆(图3 (7))。船体宽度为20cm,可以令4cm宽的电机在船体内部有较大的自由活动空间,以产生更大的扭矩使船体平衡。为了可以模拟帆船在水面正常航行时受风而发生船体倾斜的现象,整个船体外框被一根可活动的转轴连接到了两侧的支架上,同时在模型顶部设计了一个“L”型支架。由于该模型整体的重量集中于旋转轴下方,在一定程度上起到了龙骨帆船中龙骨的作用,所以当其不受外力时会保持正直,不会左右倾斜。当用一块布连接“L”型支架两头时就可以模拟出一面船帆,当使用吹风机对这面“帆”吹风时就可以模拟帆船在水面受风的效果,而那根可活动的转轴保证了船体外框在受到外力时会绕该轴旋转,模拟出船体倾斜。该结构使得模拟模型不需要放入水中就能够产生船体倾斜的效果,令研究环境不受限制,也不需要花费更多时间进行防水密封,同时也更利于观察和对其进行操作。
船体外框内部的结构同样较为简洁。由于所采用电机的尺寸为4.2cm*4.2cm*3.4cm(长*宽*高,电机旋转轴与4.2*4.2一面平行,不将电机旋转轴长度计算在内),形状相对较扁,所以将配重安装在电机后侧比安装于电机下方更合理,这使得电机与配重整体呈一个长方体进行移动,若有需要还可在该长方体的上下适当添加铅片以增加配重质量。船体的两个横截面,一面安装一根齿条,另一面安装一条滑轨。电机的旋转轴上安装齿轮,能够与齿条啮合;而配重的末尾设有一个挂钩,可以卡入横截面上的滑轨当中。该结构使得当电机转动时,可以控制整个配重在规定的轨道上进行左右运动。
3.1.2 机械系统的制作
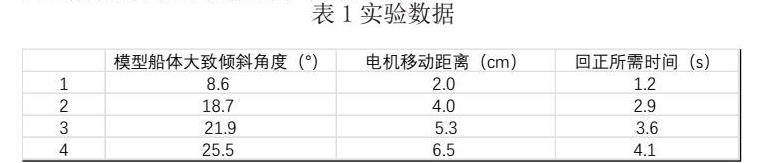
该模型(见图4)支架及外框全部采用定制的亚克力板作为材料,其具有轻便、强度达标且成本低的优点。齿轮齿条为1模15齿外径17mm的齿轮搭配1模的齿条,采用钢作为材料,能够保证强度。外径比电机直径小的齿轮可以使电机运动到船体最边缘位置,使其距船体中心点的距离最大,提供更大扭矩;而齿轮外径越小,电机需要转动越多圈以到达目标位置,可以实现对配重所处位置更为精确的控制。在电机方面选用了步进电机,不同于直流电机和交流电机,步进电机可以通过逐步改变电流以精确移动到特定位置,精度更高。配重选用铅片作为材料,可安装于电机后方的配重盒子中。船帆材料最终选取了硬纸板,普通纸张或者布强度太低无法承受实验中所提供的风力。
由于模型整体的质量不大,所以各零件之间除可活动连接外均采用胶合的方式进行连接,必要部件采用强力胶带辅助粘贴,便捷且牢固。
在制作该模型的过程中,由于一些实际情况导致最终的模型与设计的方案产生了偏差。首先,由于购买及定制的齿条、铅片和亚克力板大小与所设计的模型尺寸不匹配或有误差,通过角磨机和手钻等工具对其进行二次加工以达到合适尺寸。而图3(6)所示滑轨过于单薄,其本身强度及胶合强度均不足以令其支撑整个电机加配重的质量,因此我们弃用了该滑轨,改为用亚克力板制做一个支架与框架相连以支撑配重尾端。最后,由于发现模型本身自重不大,在倾斜时并不需要配重提供很大的扭矩来维持模型船体的平衡,因此在实验中仅装载了一个铅片进行操作。
除上述内容,剩余模型的制作均与3.1.1中所述相同。
3.2控制系统设计及制作
3.2.1控制硬件
模型控制系统中的硬件设备有:普菲德42BYGH34-401A步进电机、TB6600 SY驱动板、jy61陀螺仪、树莓派 4B 开发板、24V电源适配器。
导线:树莓派与驱动板、陀螺仪的连接使用杜邦线,驱动板与电机之间使用细导线, 24V电源适配器采用DC接口转正负极导线。
电源:树莓派GPIO引脚高电平输出电压为5V,驱动板所连接的电源为24V 1.5A。
3.2.2控制软件
驱动程序使用的编程语言是python,并且运用了time、numpy、RPi.GPIO(以下简称GPIO)三个库,其中GPIO库在程序中起到控制树莓派引脚脉冲信号的作用。程序先将陀螺仪传到树莓派的相应的报文转化成输出数据,即三个欧拉角roll、pitch和yaw,并返回控制系统所需的欧拉角roll(欧拉角的选择取决于陀螺仪在模型上的安装方式);在全局作用域中通过roll的实时变化值与程序启动时roll的初始值的差值来判断船体的倾斜状态,并作出相应的调整。基本运行逻辑为:若roll值不为0,则电机进行旋转带动配重块移动平衡船体;当roll值变为0或电机移动至最大行程时,电机停止旋转。
主程序如图5 所示,其中涉及到的主要参数有:
m——motor类的一个对象,可以对步进电机进行一系列操作
step_pin——控制电机输入电压的引脚设置
dir_pin——控制电机转动方向的引脚设置
delay——控制电机维持高或低电平的时长,其二倍与树莓派dir_pin引输出频率互为倒数
ratio_of_rot——电机移动步长与单位倾斜角度之比,由测试得出
max_allowed_div——允许最大不做配重调整的船倾斜角度,由测试得出
position_max_abs_step——电机相对于初始状态允许的最大步长,即配重块到达滑轨两侧边界时电机相对于初始状态的步长,由测试得出
配重块所需移动的距离=倾斜角度×ratio-of-rot
在自动调平算法的核心代码中,“检测电机位置与边界关系”以及“限制移动范围”的功能由于时间限制的原因尚未做参数调试,其代码在图5中使用“#”做出了注释以示参考。
4. 实验及结果
在实验中,使用吹风机对模拟船帆的纸施加一个推力使模型船体产生倾斜,陀螺仪数值为正,此时启动自动平衡系统的程序,可以发现电机会自动旋转带动配重往船体倾斜的反方向移动使陀螺仪数值趋于0,船体恢复平衡状态。而当这个力被撤掉时,船体又会向配重一侧倾斜,令陀螺仪数值为负,此时电机会向与先前相反的方向旋转重新回到中心位置令船体平衡。
而在其余多次实验中得出模型船体的倾斜角度与电机移动距离和回正所需时间之间的关系,如表1:
可以发现,当模型船体倾斜角度增加时,电机会自动增加移动距离以提供更大扭矩,同时回正所需时间也会相应增加。其中,由于吹风机功率并不足够大,因此模型船体的最大倾斜角度仅能够达到上表所写的25.5°,所以仅采集了上述实验数据。
从实验视频以及实验数据均可看出,该自动平衡系统模型能够在模型船体产生倾斜角度时将其回正,达到平衡状态,成功维持了船体平衡,证明了该系统的可行性。
5. 结论与展望
本文重点对无人驾驶帆船中的自动平衡系统的应用展开了分析探讨。通过分析比较了多种自动平衡系统硬件结构各自的优劣势,选取最适用的一个结构进行模型设计制作及实验,验证了该结构的可行性。
在后续的研究中,首先会在风速等条件更稳定的环境(如风洞)中对该系统进行实时调节平衡的实验,总结出不同的风速、风压对帆船平衡的影响,观察其能否在风力变换的情况下自主调节平衡,后根据实验结果改进。而后还将尝试还原出一艘无人驾驶帆船,并将自动平衡系统装备于该船上,使整艘船能够真正做到自主测定风向、规划航线、控制航向和船速并自动保持平衡。
综合全文内容,无人驾驶帆船是一种新兴的对于地球生态的绿色环保和可持续发展以及人类自身的健康事业都有着重大意义的机器人,而相信在加入了自动平衡系统这项技术后,无人驾驶帆船的应用范围会更广,工作效率会更高更全面,这无疑能够给当今污染严重的世界带去一种更为环保、健康、安全可靠的交通或是科考方式。
参考文献:
[1]Larry M. Uncrewed surface systems facilitating a new era of global ocean exploration. The International Hydrographic Review. https://doi.org/10.58440/ihr-29-a05
[2]Akiyama, T., Bousquet, J. F., Roncin, K., Muirhead, G. and Whidden, A. An Engineering Design Approach for the Development of an Autonomous Sailboat to Cross the Atlantic Ocean. 2021. Appl. Sci. 2021, 11, 8046.
[3]Meinig, C., Noah L. S. and Richard J. The Use of Saildrones to Examine Spring Conditions in the Bering Sea: Vehicle Specification and Mission Performance. Saildrone Inc. Pacific Marine Environmental Laboratory.4372.Joint Institute for the Study of the Atmosphere and Ocean.2015.2465
[4]Jiang, X. and Li, S. (2018). BAS: Beetle Antennae Search Algorithm for Optimization Problems. International Journal of Robotics and Control, 1(1), p.1. doi: https://doi.org/10.5430/ijrc.v1n1p1.
[5]Wang, T., Yang, L. and Liu, Q. (2020). Beetle Swarm Optimization Algorithm: Theory and Application. Filomat, [online] 34(15), pp.5121–5137. doi:https://doi.org/10.2298/fil2015121w.
[6]Warden, W.H. (1991). A control system model for autonomous sailboat navigation. [online] IEEE Xplore. doi:https://doi.org/10.1109/SECON.1991.147900.
[7]Zhou, L., Chen, K., Dong, H., Chi, S. and Chen, Z. (2021). An Improved Beetle Swarm Optimization Algorithm for the Intelligent Navigation Control of Autonomous Sailing Robots. IEEE Access, [online] 9, pp.5296–5311. doi:https://doi.org/10.1109/access.2020.3047816
[8]Stelzer, R., Jafarmadar, K., Hassler, H. and Charwot, R. (2008). A Reactive Approach to Obstacle Avoidance in Autonomous Sailing. [online] Available at: https://dora.dmu.ac.uk/bitstream/handle/2086/3970/reactive%20approach.pdf?sequence=1&isAllowed=y [Accessed 22 Jun. 2023].
[9]Torvi, S., Ingale, V. and Rajkumar, E. (2018). Design and Analysis of Rack and Pinion Mechanism in Automobile Applications Using Structural Steel and PLA. [online] International journal of Production Engineering, Vol.4: Issue 2
[10]Li, S., Li, Y., Choi, W. and Sarlioglu, B. (2016). High Speed Electric Machines – Challenges and Design Considerations. [online] DOI:10.1109/TTE.2016.2523879
本研究获得全国青少年科技创新大赛(北京市)三等奖。该赛事是由中国科协、自然科学基金委、共青团中央、全国妇联共同主办的一项全国性的青少年科技竞赛活动。

 京公网安备 11011302003690号
京公网安备 11011302003690号


