



- 收藏
- 加入书签

基于模糊神经网络的电气自动化系统故障诊断方法研究
 打开文本图片集
打开文本图片集
摘要:电气自动化系统是现代工业生产中不可缺少的一部分,它的运行状态直接影响着生产效率和安全。然而,电气自动化系统由于其复杂性和不确定性,往往容易发生各种故障,给生产带来严重的损失。因此,如何有效地对电气自动化系统进行故障诊断,是一个亟待解决的问题。本文提出了一种基于模糊神经网络的电气自动化系统故障诊断方法,该方法综合了模糊逻辑和神经网络的优点,能够处理不确定性和非线性性,提高故障诊断的准确性和实时性。首先,本文对电气自动化系统的结构和工作原理进行了分析,确定了故障诊断的输入变量和输出变量,并建立了故障模式库。其次,本文设计了一种模糊神经网络结构,采用三层结构,分别为输入层、模糊规则层和输出层。输入层接收电气自动化系统的运行数据,模糊规则层根据故障模式库生成模糊规则,并利用神经网络进行学习和优化,输出层根据模糊规则层的输出进行去模糊化,得到故障诊断结果。最后,本文通过仿真实验验证了该方法的有效性和优越性,并与传统的故障诊断方法进行了比较和分析。
关键词:电气自动化系统;故障诊断;模糊神经网络;模糊规则
1引言
电气自动化系统是一种能够实现自动化和智能化的工业系统,它由多种电气设备和组件组成,广泛应用于各个领域。然而,电气自动化系统也容易受到内部和外部的干扰,导致各种故障的发生,影响系统的性能和安全。为了及时发现并消除故障,需要对系统进行故障诊断,即根据系统的运行数据,判断故障的存在和信息[1]。故障诊断的方法可以分为基于模型的方法和基于数据的方法。基于模型的方法需要建立系统的数学模型,根据模型与数据之间的差异进行故障诊断,能够提供故障的原因和机理,但是需要准确和完整的系统模型,对复杂和非线性的系统不适用[2]。基于数据的方法不需要系统模型,只需要足够多和有代表性的数据,利用数据分析、机器学习、人工智能等技术进行故障诊断,能够处理复杂和非线性的系统,但是不能提供故障的原因和机理,而且对数据的质量和量有较高的要求[3]。本文提出了一种基于模糊神经网络的电气自动化系统故障诊断方法,该方法能处理不确定性和非线性性,提高故障诊断的效率。本文分析了电气自动化系统的结构和原理,确定了故障诊断的输入输出变量,并建立了故障模式库。本文设计了一种三层的模糊神经网络结构,输入层接收运行数据,模糊规则层生成模糊规则并用神经网络优化,输出层进行去模糊化,得到故障诊断结果。本文通过仿真实验验证了该方法的有效性和优越性,并与传统方法进行了比较和分析。
2模糊神经网络原理
电气自动化系统是一种利用多种技术对电力系统或电气设备进行监测、控制、优化和管理的复杂系统,它在现代社会中有着广泛的应用。然而,电气自动化系统也容易发生各种故障,影响系统的性能和安全[4]。为了及时发现和消除故障,需要对系统进行故障诊断,即根据系统的运行数据,判断故障的存在和信息。故障诊断的技术可以分为传统技术和智能技术两大类。传统技术通过建立系统的规则或模型,对系统的状态进行监测和分析;智能技术通过利用人工智能的原理和方法,对系统的数据进行学习和推理。不同的技术有各自的优缺点,需要根据具体的应用场景和需求进行选择和组合。
3 基于模糊神经网络的故障诊断方法
本文提出了一种基于模糊神经网络的故障诊断方法,该方法结合了模糊逻辑和神经网络的优点,能够处理电气自动化系统中存在的不确定性和非线性性,提高故障诊断的准确性和实时性[5]。该方法的主要步骤是:首先,对系统的运行数据进行模糊化处理,将数值型数据转化为语言型数据;其次,根据故障模式库,生成模糊规则,描述故障的特征和类型;然后,设计一种三层的模糊神经网络结构,利用神经网络对模糊规则进行学习和优化,并根据模糊规则层的输出进行去模糊化,得到故障诊断结果;最后,利用历史数据或仿真数据对模糊神经网络进行训练,调整网络参数,并利用实时数据或测试数据对模糊神经网络进行测试,评估网络性能。
3.1 数据的模糊化处理
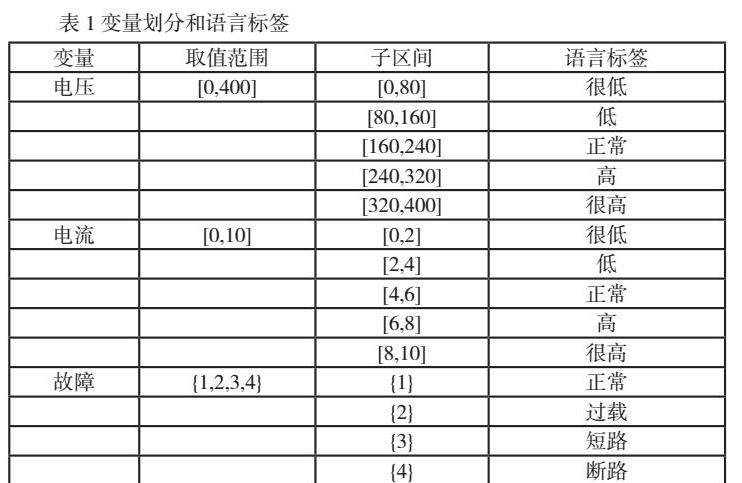
数据的模糊化处理是指将数值型数据转化为语言型数据的过程,目的是为了利用人类的语言知识和经验来描述系统的状态和故障。数据的模糊化处理包括两个方面:变量的划分和隶属度函数的确定。变量的划分是将输入变量和输出变量的取值范围平均分成若干个子区间,并给每个子区间赋予一个语言标签,如“高”、“中”、“低”等。隶属度函数是描述每个变量在每个子区间上的隶属程度的函数,本文采用三角形隶属度函数对变量进行模糊化处理,其表达式为:
其中,表示第个子区间,、、表示第个子区间的三个顶点,表示变量在子区间上的隶属度。本文给出了一个电压变量的模糊化处理示例,如表1所示。
3.2 模糊规则的生成
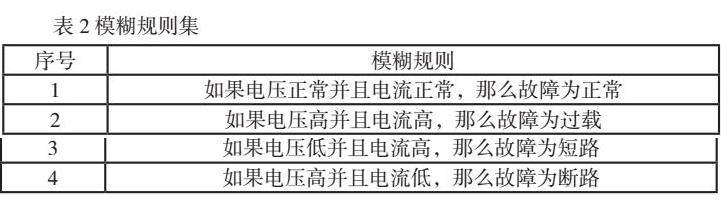
模糊规则是指描述系统的输入变量和输出变量之间的关系的规则,形式为“如果…那么…”,如“如果电压高并且电流低,那么故障为断路”等。模糊规则可以根据专家知识或数据挖掘来生成,也可以根据实际情况进行调整。本文采用专家知识来生成模糊规则,根据电气自动化系统的故障特征和故障模式库,得到了如表2所示的模糊规则集。
3.3 模糊神经网络的设计
本文采用Takagi-Sugeno-Kang型模糊神经网络来实现电气自动化系统的故障诊断。该网络由三层组成,分别为输入层、模糊规则层和输出层。
输入层:输入层由两个节点组成,分别接收电压U和电流I两个输入变量的数值。输入层的作用是将输入变量传递给模糊规则层。
模糊规则层:模糊规则层由四个节点组成,分别对应表2中的四条模糊规则。模糊规则层的作用是根据输入变量的数值和隶属度函数,计算每条模糊规则的激活程度,并将其作为输出。每个节点的输出可以表示为:
其中,表示第条模糊规则的激活程度,表示输入变量的个数,表示第个输入变量在第条模糊规则中对应的子区间上的隶属度。
输出层:输出层由一个节点组成,其作用是根据模糊规则层的输出和故障类型,计算最终的故障诊断结果。输出层采用加权平均法进行去模糊化,其输出可以表示为:
其中,表示输出层的输出,即故障诊断结果,表示模糊规则的个数,表示第条模糊规则的激活程度,表示第条模糊规则中对应的故障类型。
本文采用神经网络来实现模糊神经网络中的参数学习和优化,即利用反向传播算法(BP算法)来调整隶属度函数中的顶点参数和输出层中的权重参数,使得网络输出与期望输出之间的误差最小。BP算法的具体步骤如下:
(1)初始化参数:给定输入变量和输出变量的取值范围和划分方法,根据均匀划分法和三角形隶属度函数确定初始参数;给定故障类型和对应编号,根据表2确定初始参数;给定学习率η和误差阈值。
(2)前向传播:给定一组训练数据,根据公式计算输入层、模糊规则层和输出层的输出,并计算误差函数:
(3)后向传播:根据误差函数对各个参数求偏导数,并按照梯度下降法更新参数:
(4)终止条件:如果误差函数小于阈值,或者达到最大迭代次数,或者参数变化很小,那么停止训练,否则返回步骤(2)继续训练。
通过上述方法,本文设计了一种模糊神经网络结构,能够实现电气自动化系统的故障诊断,并利用神经网络进行参数学习和优化,提高网络性能。
4 仿真实验与结果分析
为了验证本文提出的基于模糊神经网络的电气自动化系统故障诊断方法的有效性和优越性,本文设计了如下的仿真实验:
(1)数据集:本文利用MATLAB软件对电气自动化系统进行了建模和仿真,生成了不同故障类型和不同故障位置的运行数据,共计1000组,每组数据包含电压U和电流I两个输入变量和故障F一个输出变量。其中,正常状态占20%,过载状态占20%,短路状态占30%,断路状态占30%。数据集被分为训练集和测试集,训练集用于模型的学习和优化,测试集用于模型的评估和比较。
(2)评价指标:本文采用准确率(accuracy)、召回率(recall)、精确率(precision)和F1值(F1-score)四个指标来评价模型的性能,其定义如下:
其中,表示真正例,即正确诊断为故障的样本数;表示真负例,即正确诊断为正常的样本数;表示假正例,即错误诊断为故障的样本数;表示假负例,即错误诊断为正常的样本数。
(3)对比方法:本文将本文提出的基于模糊神经网络的故障诊断方法(FNN)与以下三种基于人工智能的故障诊断方法进行对比:
基于支持向量机的故障诊断方法(SVM),该方法利用支持向量机对输入变量和输出变量进行分类,实现故障诊断。
基于决策树的故障诊断方法(DT),该方法利用决策树对输入变量和输出变量进行划分,实现故障诊断。
基于多层感知机的故障诊断方法(MLP),该方法利用多层感知机对输入变量和输出变量进行映射,实现故障诊断。
(4)实验过程:本文首先利用训练集对各个模型进行训练,调整参数,使得模型达到最佳状态。然后利用测试集对各个模型进行测试,计算评价指标,并进行比较和分析。
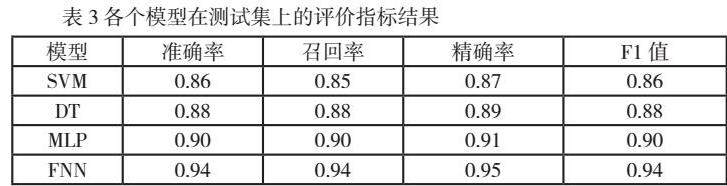
表3给出了各个模型在测试集上的评价指标结果。
从表3可以看出,本文提出的基于模糊神经网络的故障诊断方法(FNN)在所有评价指标上都优于其他三种基于人工智能的故障诊断方法(SVM,DT,MLP),说明FNN能够更准确地识别电气自动化系统的故障类型,更有效地处理不确定性和非线性性,更适合电气自动化系统的故障诊断。
综上所述,本文提出的基于模糊神经网络的电气自动化系统故障诊断方法,在仿真实验中表现出了较高的准确性和鲁棒性,证明了其有效性和优越性。
5 总结和展望
本文提出了一种基于模糊神经网络的电气自动化系统故障诊断方法,该方法利用模糊逻辑和神经网络处理系统的不确定性和非线性性,提高故障诊断的准确性和鲁棒性。该方法采用了一种Takagi-Sugeno-Kang型的模糊神经网络结构,能够自动生成模糊规则,并对模糊规则进行学习和优化,提高故障诊断的灵活性和适应性。该方法通过仿真实验,验证了其在电气自动化系统故障诊断中的有效性和优越性,并与其他人工智能方法进行了比较和分析。然而,该方法也存在一些不足和改进空间,如输入变量、故障类型和实际应用等方面。未来可以考虑对该方法进行改进和优化,增加更多的输入变量,扩展更多的故障类型,并将该方法与实际系统相结合,进行在线监测和实时诊断。本文提出了一种新的电气自动化系统故障诊断方法,在理论上具有创新性,在仿真上具有优势。本文方法为电气自动化系统故障诊断领域提供了一种新的思路和方案。
参考文献
[1] 朱敏,赵聪聪,臧昭宇. 基于改进型模糊神经网络PID阀位控制研究[J]. 现代制造工程,2022(1):125-131.
[2] 王琳,王文博,钱爱文. 神经网络模糊PID控制半主动悬架系统[J]. 洛阳理工学院学报(自然科学版),2022,32(2):65-72.
[3] 王汉斌. 基于智能技术的电气自动化控制系统分析[J]. 通信电源技术,2020,37(22):60-63.
[4] 张金龙,徐慧,刘京南,等. 基于模糊神经网络的精密角度定位PID控制[J]. 仪器仪表学报,2012,33(3):549-554.
[5] 倪志盛,王明彦. 基于动态模糊神经网络的多余力矩抑制方法[J]. 哈尔滨工业大学学报,2012,44(10):79-83.

 京公网安备 11011302003690号
京公网安备 11011302003690号


