



- 收藏
- 加入书签

基于自适应算法的海洋环境下的压力传感器研究
 打开文本图片集
打开文本图片集

摘要:水深压力传感器是鱼雷的重要组成部分,影响其控制系统并决定其在海战中的性能。然而,目前的开发尚不完善,本土化率低,主要依赖进口。针对传感器在浅水区域需要提升检测精度的实际需求。本文分析了海洋条件下水压传感器的抗干扰要求,并提出了一种软件处理方法,根据量程变化,自动调整补偿公式,使其在不同量程段自动适应达到全量程内均能满足精度的需求。
关键词:自适应;海洋,压力传感器,精度
引言
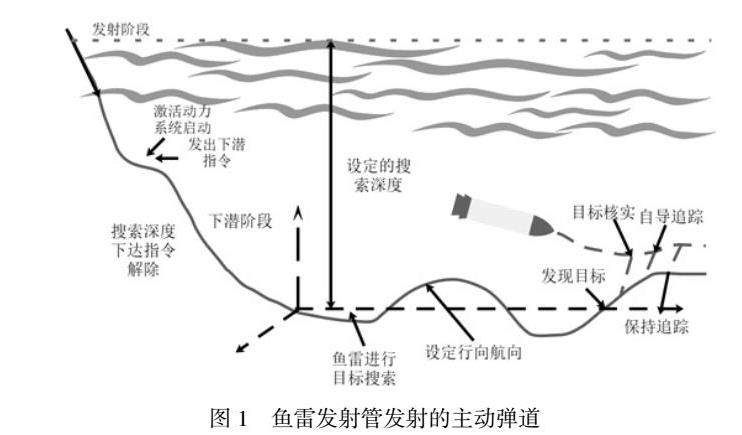
鱼雷是能够自主导航、引导和攻击水面或水下目标的水下武器,由潜艇、水面战舰和飞机携带,用于攻击潜艇、水面战舰和其他水下目标。鱼雷被广泛应用,能够自动搜索和攻击目标,具有隐蔽性好、抗干扰能力强、命中率高和爆炸威力大等特点,成为海军的主要攻击武器之一[1]。鱼雷的深度控制决定了鱼雷所使用的海域深度。从图1可以看出,鱼雷导航的深度不断变化,要求压力传感器具有准确稳定的压力测量能力,同时能够自动适应不同的深度范围,并在不同的范围内提供更详细的压力测量数据。
鱼雷内部空间紧凑,结构复杂,高度集成,拆卸非常困难。当压力开关和传感器长期使用或存储产生时漂,需要重新校准时,只能随大修期拆卸返厂家维修,周期长且拆卸后二次装配存在安全隐患。同时,国内鱼雷装备的压力传感器及压力开关,独立分体使用,重量沉,在高度集成化的鱼雷内部占用空间大,影响鱼雷的作战效能。
因此,开发传感器的免拆卸在线校准能力,可实现无需返厂,在线快速校准,提升武器装备的保障能力;实现压力传感器和压力开关的小型化、集成化,能够缩减体积,减轻重量,提升鱼雷作战效能。
综上所述,压力测量是保证鱼雷精确打击目标的基础支撑技术,是保障鱼雷稳定航行的关键技术指标之一,非常有必要对基于自适应算法的海洋环境下的压力传感器进行研究。
1 水下压力传感器自适应方法
压力测量是保证鱼雷精确打击目标的基础支撑技术,也是解决鱼雷深度的技术指标。鱼雷的航行深度反复多变,不同深度的海水温度不同,对压力传感器的热零点和热灵敏度均有影响,因此需要压力传感器具有准确、稳定的压力测量,同时自动适应不同深度量程,在不同量程段内提供更加细分的压力测量数据[2]。
1.1 量程智能匹配判断技术研究
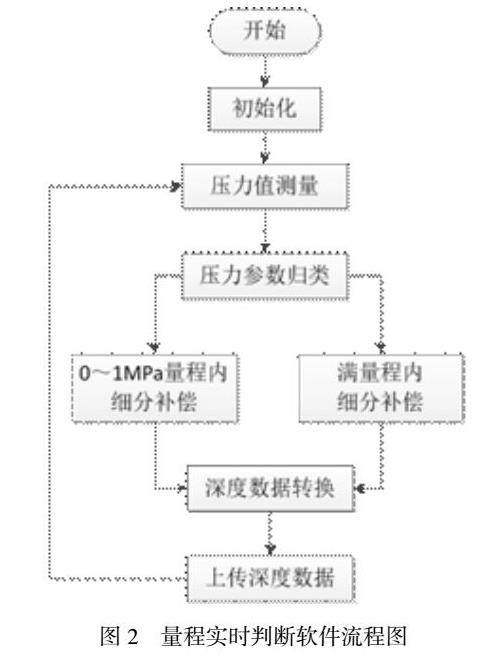
如图2所示,量程实时判断的功能实现全部在信号处理电路的微处理器中进行。
在传感器上电后,首先将压力量程选定为满量程段,对测得的压力值在满量程段进行段内判断,若其大于1MPa,则使用满量程对应的补偿函数进行非线性、温度等补偿,否则使用(0~1)MPa量程对应的补偿函数;然后将补偿后的压力测量值转换为深度值;最后上传深度数据,并进行下一轮压力值测量。
1.2 压力温度综合曲线补偿技术研究
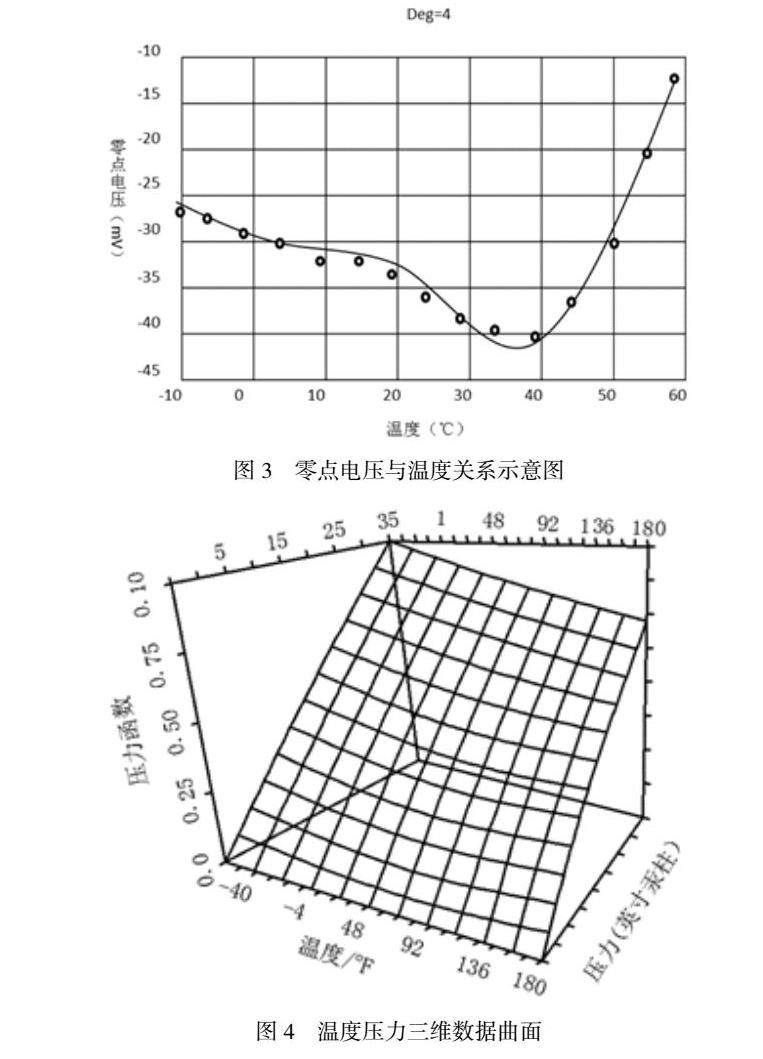
压阻式压力传感器具有体积小、灵敏度高、动态响应快、使用方便等优点,但由于它是半导体材料制成的,存在温度的影响,表现为环境温度的变化会引起传感器零点漂移和灵敏度漂移,再加上其本身所存在的非线性问题,以及器件在封装加工过程中受到的应力影响,测量精度难以满足技术指标的需要。压阻式压力传感器在输入压力相同的情况下,不同的环境温度会得出不同的输出值,如下图所示。
要解决传感器温度误差补偿问题,需要在测出安装在传感器内靠近敏感元件处的温度后,建立对应温度误差数学模型,通过微处理器的温度误差补偿程序,对传感器信号的温度误差进行补偿。
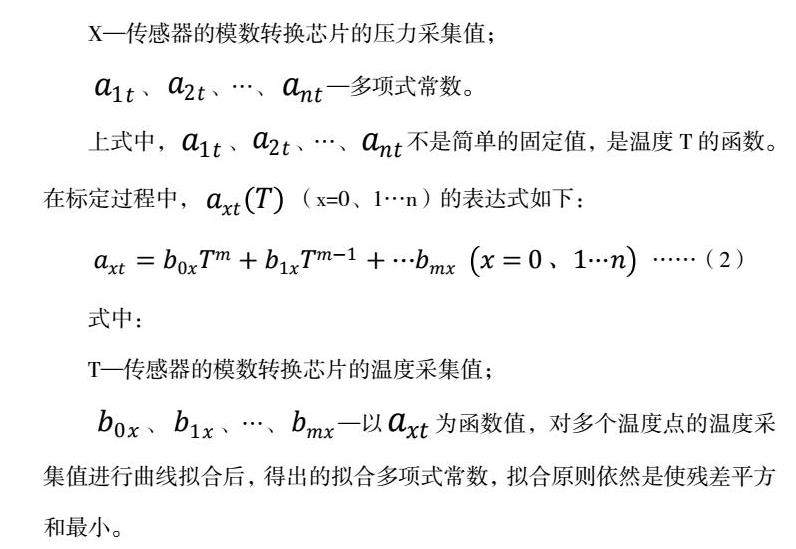
传感器无补偿的输出在很大程度上取决于温度和压力。图4的表面向右下倾的实情表示温度升高时传感器对压力变得不太敏感,在固定温度下,传感器对压力的响应也呈轻微的非线性。为解决这样问题,必须使问题简单化,找出它们间的关系,建立对应的三维曲面数学模型,通过算法来模拟补偿原传感器数据中,随温度变化的误差及非线性度,可大大提高传感器的精度。由于线性拟合算法只适用于静态特性曲线为直线的情况,当特性曲线的数据为曲线,即拟合方程为高阶多项式方程时,线性拟合法并不适用,这时把线性拟合算法加以推广,采用分段线性拟合算法来实现对数据的跟踪。分段线性拟合算法的思想与线性拟合算法基本相同,都是利用历史数据拟合直线方程,与线性拟合法最大的区别在于:它的曲线的参数不是固定的,而每个多项式常数,都是单独温度不断更新拟合的曲线多项式计算结果。传感器压力值计算高阶多项式拟合曲线方程如下式所示。
、、…、—以为函数值,对多个温度点的温度采集值进行曲线拟合后,得出的拟合多项式常数,拟合原则依然是使残差平方和最小。
当传感器进行压力测量时,首先采集当前环境温度AD采集值,将其代入式(2)中,得出一系列当前温度下对应的常数值a0t、a1t…ant,再将压力AD采集值代入式(1)中,求得当前压力测量值。
针对本项目(0~1)MPa压力段±0.1%FS的精度要求,采用线性拟合算法无法满足,必须采用曲线拟合算,只要压力敏感芯题的重复性和迟滞足够高,分段与多项式阶数足够多,所得精度就能足够高。
1.3 数字化降噪滤波技术研究
在进行数据采集时,由于数字电路部分A/D等信号切换产生数字噪声,同时模拟电路部分的噪声信号通过电源耦合到数字电路中来,使噪声信号变得复杂,噪声信号使得采样结果产生误差,同时还要考虑使用环境及其他噪声信号的叠加和干扰。因此在高精度测量系统中,去除噪声信号对提高系统精度有重要意义,采取适当的手段以保证A/D转换精度。主要从软、硬件两方面考虑:硬件电路方面增加模拟和数字电路的电源隔离并根据实际信号情况设置合理的带通滤波电路,在软件上根据测量要求采用适当的数字滤波技术滤除噪声信号。以改善噪声干扰,提高测试总精度。
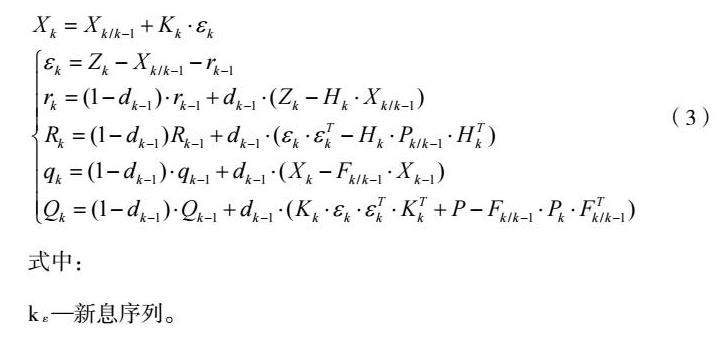
卡尔曼滤波不仅可以估计信号或状态的最优值,也可以估计模型参数。当被用于模型参数估计时,众多研究者提出适用于不同场合的自适应卡尔曼滤波器(Adaptive Kalman Filter,缩写为AKF),其包括:Sage-Husa自适应滤波器、强跟踪卡尔曼滤波器、改进的自适应滤波器等,其中Sage-Husa自适应滤波器是典型代表。在滤波过程中,使用递归计算,不断修正预测值,同时利用随时间变化的噪声估计器,以达到预测且修正系统模型参数和噪声特性的目的,使滤波模型与实际系统更加接近,从而可以获得最优估值结果[3]。
其中的时变噪声递推估值器为:
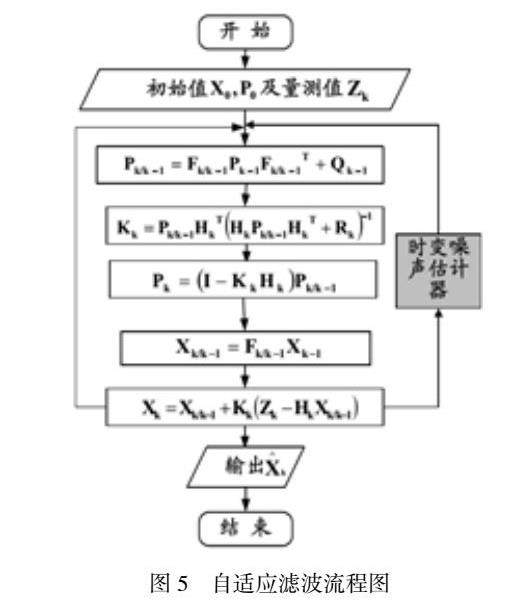
通常b的取值范围为0.95<b<0.995,则构成了完整的AKF,其流程图如下图所示。相比于传统卡尔曼滤波器,此滤波器的滤波精度有了很大提高,实现参数的在线自适应改进,成功抑制了发散,提高了精度。
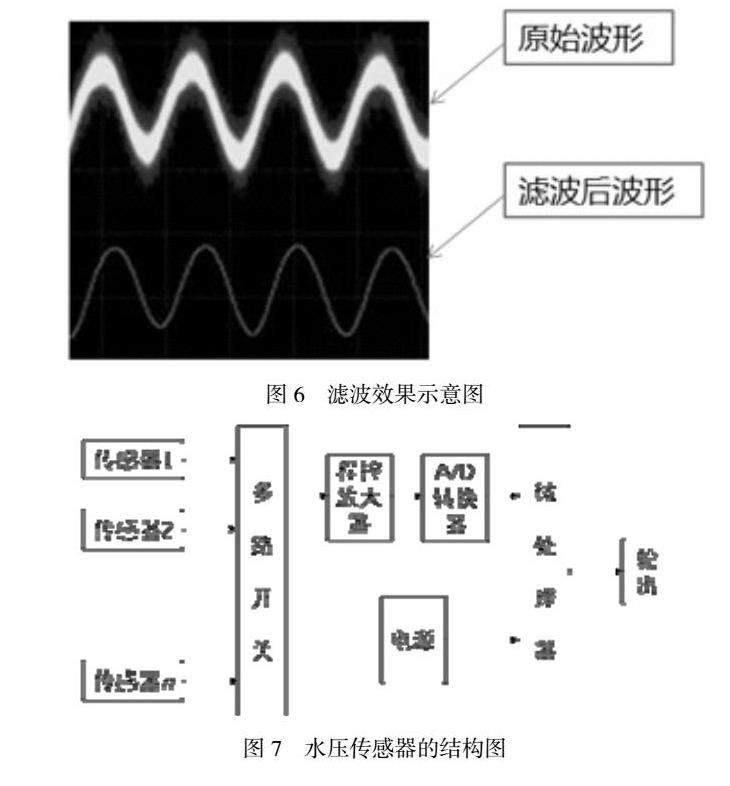
在滤波过程中,使用递归计算,不断修正预测值,同时利用随时间变化的噪声估计器,以达到预测且修正系统模型参数和噪声特性的目的,使滤波模型与实际系统更加接近,可以随时根据系统的变化来改变噪声参数,所以可以实现高精度的滤波效果,如图6所示。
2 水压传感器的硬件实现
水压传感器的硬件部分主要包括传感器、信号调理电路、实时信号处理部分等。在硬件性能要求方面,硬件必须具备获取大量信息数据并快速处理的能力,以便对获取的多方信息进行融合、处理和决策。此外,鱼雷系统是一个长时间在水下运行但无法维护的复杂系统,传感器必须具备高可靠性和低能耗。水压传感器的结构如图7所示。
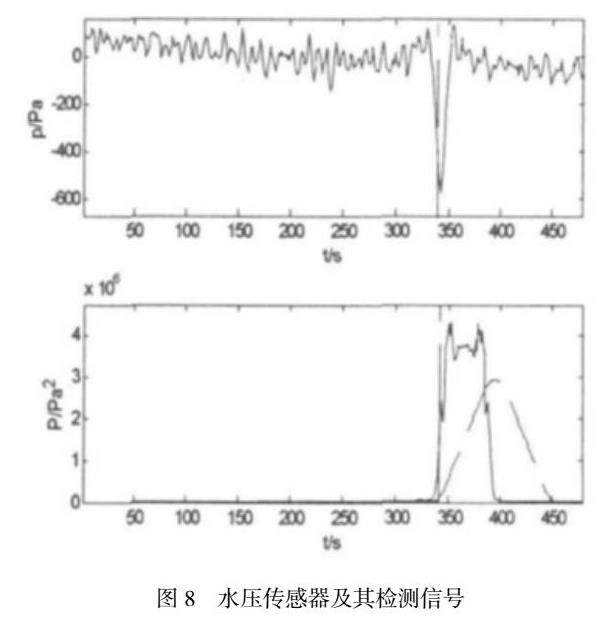
3 实验测量
2023年3月,在某海区进行了实测试验。本次试验采用的自主研发的CY-1422型低功耗智能绝压压力传感器,考虑功耗原因,选用了MSP430F413单片机作为系统的微处理器。试验海区海浪4~5级,测量点水深18 m。试验结果如图8所示。从图中可以看出,采用自适应抗干扰方法的水深压力传感器在复杂的海况条件下,能够较好地检测到周围环境的压力,从而证明了该水深压力传感器具有较强的抗海浪干扰能。
4 小结
面对复杂多变的海洋环境,具有自适应、自我调整、自我识别能力的水深压力传感器,从硬件和软件两方面对传统水深压力传感器进行了改进,较好地克服了传统水深压力传感器在高海况条件下无法给出精准的测量值。通过需求分析提出了一种软件自适应分段测量算法,使传感器可以自适应、自我调整、以此给出更加精确的测量数据,是水深压力传感器智能化发展的方向,对工程应用有着重要的指导性意义。
参考文献:
[1]王振宇. 海洋温盐深高精度测量集成微纳传感器制备及测试[J]. 中国科学:信息科学. 2022.52.03.
[2]丰雷,黄清泉. 自适应水压引信在高海况背景环境下的研究[J]. 水雷战与舰船防护. 2009.17.01.
[3]孙田伟,钟兴旺,踪念科,王国勇. 基于卡尔曼滤波的时分星间信号跟踪技术研究[J]. 空间电子技术.2023.20.03.

 京公网安备 11011302003690号
京公网安备 11011302003690号


