



- 收藏
- 加入书签

基于物联网的智能面容解锁机器人控制系统的探索
 打开文本图片集
打开文本图片集
摘要:门禁解锁系统是整个智慧家庭的实体入口,直接关系到住户的人身和财产安全。随着物联网和机器人技术的快速发展,面容解锁技术有了更大进步。本文通过机器人视觉识别技术进行人脸识别解锁,并通过物联网实现远程控制功能,不但让使用者感受到智慧装置的效率和方便,又能将安全系数大大提高。
关键词:物联网;视觉识别;机器人;STM32
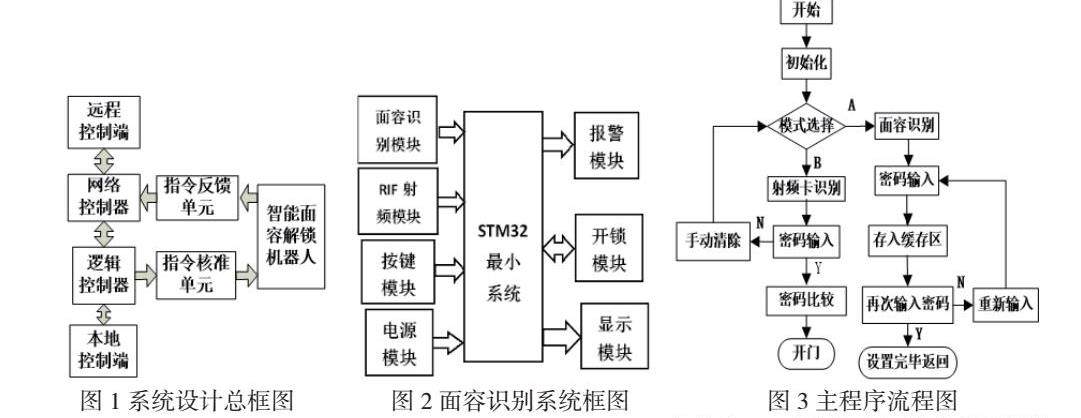
1.总体设计思路
基于物联网的智能面容解锁机器人控制系统,包括远程控制端、网络控制器、逻辑控制器、本地控制端、指令核准单元、指令反馈单元和机器人,其中:远程控制端无线双向连接网络控制器,网络控制器无线连接逻辑控制器,本地控制端与逻辑控制器之间有线连接,逻辑控制器与指令核准单元之间有线连接,指令核准单元与机器人之间有线连接,指令反馈单元与网络控制器之间无线连接[1],如图1所示。
智能面容解锁机器人控制系统主要模块有STM32单片机系统、4×4矩阵键盘、 TFT彩色 LCD显示和报警系统等,它还拥有面容识别、设置、修改密码、超次报警、超次锁定、密码错误报警等功能。除了以上所说的基本口令锁定功能之外,还可以根据具体情况增加远程控制,实现物联网控制。系统特点如下:
(1)具有机器人视觉进行人脸识别开锁的功能,需提前录入住户的面容信息。
(2)具有 RIF射频卡片开锁的功能。
(3)具有按键解锁功能。通过设置4×4的矩形键盘,该矩形键盘由数字键0至9组成,由数字键*、#以及功能键A-D组成。为避免口令被盗,该设计需要在口令输入时,在画面上出现一个*数字。在“口令”正确的情况下,语音提示“开”;“口令”出错的情况下,语音提示“ERROR”并重新输入;“输入口令”的情况下进行“导入路径 WORD”的显示。
(4)具有警告功能,当以上三种方式解锁出错时,机器人控制系统会发出嗡嗡报警声,发光二极管灯会发光。
(5)信息修改功能。管理者可以通过权限设置机器人系统中的面容信息,RIF射频卡片信息,也可以修改解锁密码[2]。
2.系统硬件设计
该系统以STM32F103为主体,采用了多功能微控制器。人脸识别系统则是对使用者进行身份认证和门锁的管理。使用者通过机器人视觉面容识别模块扫描,经认证后,便可进行解锁操作,并输出对应的信息[3]。面部识别的系统框图如图2所示。
(1)控制器:使用STM32系列的单片机,可靠性高,性价比高,可以在线编程和整机调试。
(2)显示模块:使用 TFT彩色液晶屏,该液晶屏幕具有很强的显示能力,可以显示出很多的文本和图表,可以很清楚的显示出各种各样的内容。
(3)矩阵按键模块:使用4×4按键模块,提供16个按键,并且可以降低键盘与单片机引脚的界面所占用的 I/O线的数目。
(4)电源模块:电源电路L298N,其具有强大的传动性能、较小的发热、较好的抗干扰性等。
(5)RIF射频模块:读卡芯片RC522所使用的MFRC522是一款高集成度的读写卡,用于13.56 MHZ的无接触通讯。
(6)面容识别模块:面容读卡器HLK-TX510是一款以TX510为核心的 AI芯片,具有很强的 AI运算能力及高分辨率的特点,并具有3D活体测量、3D面孔识别、红外线活体探测、可见光活体探测等功能[4]。
3. 系统软件设计
该系统软件设计采用 C语言编程,由主程序、初始化程序、LCD显示程序、键盘扫描程序、键功能程序、密码设置程序、EEPROM读写程序和延时程序等组成[5]。主要程序设计流程如图3所示。
4. 结论
基于面容解锁的技术,以安全性、便捷和低价格为主要优势。本文对基于物联网的智能面容解锁机器人控制系统进行探索研究,初步设计了硬件电路,包括单片机控制、电源、键盘、显示屏、射频卡、人脸识别等[6];在此基础上进行了机器人控制系统的软件设计。实现了面容解锁的基本功能以及设备物联网,还有很多的不足需要做更进一步的研究与探索[7]。
参考文献:
[1] 谷甘军.一种基于物联网的智慧机器人[EB/OL].2021-06-15.
[2] 胡飞. 智能锁安全体系的设计与研究[D].电子科技大学,2018.
[3] 王志勇. 智能门锁控制系统的设计与开发[D].浙江理工大学,2018.
[4] 鄢永明. 静电放电及其防护器件研究[D].湖南大学,2016.
[5] 陆锌渤.浅析射频识别技术[J].中国新通信,2018,20(01):67-68.
[6] 李瑞鹏. X 射线衍射仪控制系统设计[D].西安电子科技大学,2018.
[7] 高福友. 低功耗指纹锁无钥匙门禁系统设计及协议制定[J].计算机工程与设计,2011,32(03):887-891.
作者简介:
王宏扬(2022.8—),男,汉族,辽宁朝阳,本科在读,单位:大连工业大学艺术与信息工程学院,研究方向:智能制造,物联网。
郭琳(1986.8—),女,满族,辽宁鞍山,讲师,硕士研究生,单位:大连工业大学艺术与信息工程学院,研究方向:机器人控制,人工智能。

 京公网安备 11011302003690号
京公网安备 11011302003690号


