



- 收藏
- 加入书签

基于红外热成像原理的多功能救援机器人的设计
 打开文本图片集
打开文本图片集
摘要: 天灾人祸频发给救援工作带来了巨大挑战,还会对救援人员带来生命危险。为了提升救援工作效率和保障救援人员安全,本文对比市面同类救援机器人优缺点的基础上,研究设计了一款新的救援机器人,它具有自身优势和创新性,会给灾后救援工作带来更大便利,减少生命财产损失。
关键词:灾难 救援 机器人
近年来,全球各地地震、泥石流、台风、海啸、矿难、恐怖活动、核泄漏和局部战乱等自然或人为的灾害发生不断,给人类安全带来了严重的威胁。伴随着这些大型灾难会有大量的房屋建筑坍塌,导致众多受难者被困被埋,而营救这些受难者的最大困难就是不能及时的确定他们的确切位置并救出,从而延误最佳的救援时间。
通常救援工作面临着两个问题:环境的复杂性和危险性。以城市环境为例,人口城市化和城市人口密集现象加剧,高层建筑、地下工程、大型商贸场所、文化娱乐场所迅猛发展,城市建筑物不断增加,使得城市建筑环境中的搜救作业十分复杂。在一些危险性大的灾难中,如随时会引发爆炸的火灾现场,有易燃、易爆或剧毒气体存在的现场,地震后存在易二次倒塌建筑物的现场,施救人员无法深入进行侦察或施救,人们急于探知灾难现场的内部险情,但又不敢或无法接近或进入灾难现场。此外,灾后环境中的各种不确定的安全隐患对于幸存者和救援人员的生命安全造成了严重威胁,也会对救援工作的展开产生很大的阻碍。
因此,为了提升灾后救援工作的效率,挽救更多受灾人员及保障救援人员的安全,本文主要基于红外热成像原理研究一种多角度探测和双臂型多功能救援机器人的设计。
一、项目设计的意义
纵观国内外的救援现状,专门的灾后救援设备的发展依然处于初级阶段,目前灾后用的最多的救援设备是铲车、挖掘机、吊车等工程车辆与小型液压钳配合使用,由于这些工程车辆本身重量很重、价格昂贵、不易拆装且需要专门的操作人员,由此决定了运用这样的设备进行救援的效率是非常低的。为了减少自然灾害带来的损失,世界各国都在努力建立健全自己的震后救援体系,但由于实用性、成本等因素的考虑,至今未能形成专门性的营救系统。尤其是中国,限于经济、人口、地震的发生频率等因素的考虑,在震后营救方面的水平还有较大提升空间。
在20世纪80年代,有的国家已经将机器人应用于救援工作中进行探讨,但救援机器人技术的正式研究始于1995年的日本神户一大阪大地震,并在2001年的美国9·11事件中,救援机器人正式投入应用。但这些机器人在控制方式、防水性、视野等很多方面也暴露出了不足,此后,引发了救援机器人的研究热潮。近年来,机器人在理论和实际应用上都取得了很大的进步,研究出了一些高科技救援设备,2008年冬季南方雪灾以及“5.12”汶川大地震等的抢险救援中,使用了一种叫做Bobcat Skid Steer Loader的多功能救援机器人,取得了不错的营救效果。该机器人引起了全球的注意,救援机器人的研制势在必行。在计算机等新技术的发展推动下,机器人的应用领域迅速扩大。
近年来,世界各国对机器人的研究工作都投入了大量的人力和物力,并取得了一定的成绩。比如,日本研究发明的Snakebot机器人,该机器人主要承担搜索工作,长约8m,依靠装有动力装置的尼龙绳索进行驱动,可以深入灾后废墟的各个狭小角落。其利用摄像机构成的“眼睛”传回的影像可传回的影像可以使救援者了解并控制受灾区域的内部情形。该机器人经受了可控和现实灾难的双重检验,在加入到日本地震救援之前,它曾在美国佛罗里达的一次停车场坍塌事故中帮助救援队实施营救。此外,美国在9·11事件后,对机器人的研究更加重视。其中,极具代表意义的由Irohot公司研制的小型便携带式机器人Packbot系列和Warrior等均得到了较好的应用。我们中国对于救灾机器人的研究起步虽然较晚,但受到的重视程度很高。如国家“863”计划支持研发地震救援辅助机器人等的一系列措施;国内各大高校、研究机构以及企业单位等都进行了积极研究,近年来取得了很大进展。如我国研究发明“龙虾”救援机器人是目前世界上最大的抢险救援机器人之一。它的每只臂有7个自由度,在工作人员的控制下可自由升降,且能模仿人的双臂进行无死角的协调及配合作业,还能实现轮、履两用驱动行驶。具有油、电“双动力”交替驱动,可双臂手作业,轮履复合行进,其双臂末端的机械手可根据作业或救援现场的需要快速更换不同作业功能的液压属具,实现快速装卸、拆解、抢险救援等作业。
基于以上介绍的几款救援机器人,本文研究设计的机器人相比以上的几款救援机器人具有如下几个有优点:
1、机器人行走机构采用多轮环越野型底盘,可以改变自身的运动构型进入危险区域或救援人员无法进入的复杂环境,具有较好的行走能力并且稳定性好。
2、双臂仿生设计,可配合或独立工作,具有撑、剪、抓的功能。撑具采用了液压扩张装置,撑开缝隙并扩充为通道,增大被困人员的生存空间;剪具有咬裂、咬碎、剪断功能且有导向结构,可以配合撑具撑开缝隙;抓具采用仿鹰爪设计,通过气动控制,调整爪具,让受困人员安全被保护在仿生设计的鹰爪中间,然后将其托入机器人内部,将其救出并且不会造成被困人员二度受伤。
3、搭载整套的传感器,主要包括测距传感器、生命探测传感器、还有温湿度等其他传感器。测距传感器为红外测距传感器,它主要用于探测机器人周边障碍物情况,根据探测的障碍物距离来实现机器人的实时避障;生命探测传感器主要探测灾后环境中的生命特征,气体传感器用来检测空气中气体成分,是否含有毒害或者易燃气体;温、湿度传感器用于检测现场的温湿度情况。
4、救援机器人专用的硬件模块,包括摄像头、远程信号传输模块、串口通信模块和GPS导航模块等。摄像头对机器人所处环境的图像进行采集;远程信号传输模块和串口通信模块主要用于确保机器人采集的信息及时传输回救援中心;GPS导航模块是为了操作人员准确了解机器人的位置信息,便于救援人员根据机器人采集到的现场信息,对现场的受灾情况做出准确判断,以便于准确的作出救援部署。
5、救援机器人设有专门的软件平台,它包括人机交互界面的设计,传感检测及其他模块的软件实现和机器人的移动避障设计,主要用来处理和显示机器人所采集的环境信息,以及进一步作出决策来控制机器人的下一步行动。
这款基于红外热成像原理的多角度探测双臂型救援机器人将运用机械手救助被困人员、越障行走、数据采集、多传感器信息融合以及救援机器人的路径规划结合起来,形成一套救援机器人的多传感器测控与救援系统,能够在较复杂危险的环境中代替人做现场的勘察、检测以及对于现场发生紧急情况时进行及时的处理,有效提高救援工作效率的同时,能够减少救援人员进入危险区域所带来的不必要的伤亡。在救援的同时,也可以将救援现场的情况,及时的反馈给救援总部,让总部第一时间了解灾害现场的总体情况,并做出合理的判断和救援部署,节约了救援时间,最大程度上减少了人员生命安全和经济财产上的损失。
二、项目设计的内容
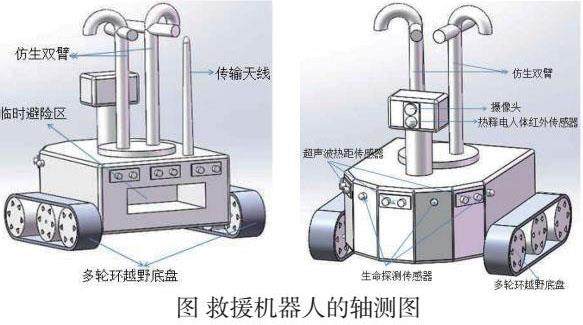
本项目设计主要基于红外热成像原理进行多角度探测和双臂型多功能机器手进行救援展开,如图所示,它主要由机械部分和探测设备构成。
机械部分主要包括:1、采用多轮环越野型底盘,具有较好的行走能力并且稳定性好,可较好地适应复杂的灾害事故救援现场;2、双臂仿生设计,可配合或独立工作,具有撑、剪、抓的功能。撑具采用了液压扩张装置,撑开缝隙并扩充为通道,增大被困人员的生存空间;剪具有咬裂、咬碎、剪断功能且有导向结构,可以配合撑具撑开缝隙;抓具采用仿鹰爪设计,通过气动控制,调整爪具,让受困人员安全被保护在仿生设计的鹰爪中间,然后将其托入机器人内部,将其救出并且不会造成被困人员二度受伤。
探测设备主要包括:红外热成像仪、多角度无线视频采集装置、测距定位系统等来进行现场情况探测、采集、分析,为机械臂的操作做准备。
具体设计如下:
1、通过对灾害现场的分析,得出灾后救援的一般特点,提出对应的救援机械的设计方案。
2、在得出系统的设计方案后,然后对机械臂进行结构设计,勾勒出此机械的尺寸、结构、零部件的连接形式、两个机械臂的运动方式,同时对救援机器人的传感检测平台进行设计。熟悉和掌握应用在救援机器人上的多种传感器的工作原理、性能参数、应用电路等。分析和设计各传感器在机器人上的布局,使其能够采集到满足机器人越障和救援的数据,结合采集到满足机器人机器人越障和救援的数据从而进一步计算机械臂并选用各部件,然后利用三维软件对设想的机械进行三维建模。
3、以救援机器人的灾后救援为应用背景,利用实验室器材制作机器人的初步模型,运用多传感器融合方法对机器人搭载传感器数据进行分析处理,同时连接测试救援机器人摄像头、远程信号传输模块、串口通信模块和GPS导航模块等硬件模块,使机器人自主行进越障与救援。
4、对机器人的自主行进越障与救援方案进行仿真分析,对其仿真缺陷进行优化,得到救援机器人越障与救援最终方案。
本项目拟解决的关键问题是机械臂的设计与传动配合 、如何将机器人的硬件和软件设备信息融合实现机器人的自主化。
三、项目创新点
本项目设计具体创新点如下:
1、救援机器人专用的硬件模块,包括摄像头、远程信号传输模块、串口通信模块和GPS导航模块等。摄像头对机器人所处环境的图像进行采集;远程信号传输模块和串口通信模块主要用于确保机器人采集的信息及时传输回救援中心;GPS导航模块是为了操作人员准确了解机器人的位置信息,便于救援人员根据机器人采集到的现场信息,对现场的受灾情况做出准确判断,以便于准确的作出救援部署。
2、救援机器人设有专门的软件平台,它包括人机交互界面的设计,传感检测及其他模块的软件实现和机器人的移动避障设计,主要用来处理和显示机器人所采集的环境信息,以及进一步作出决策来控制机器人的下一步行动。
这款基于红外热成像原理的多角度探测双臂型救援机器人将运用机械手救助被困人员、越障行走、数据采集、多传感器信息融合以及救援机器人的路径规划结合起来,形成一套救援机器人的多传感器测控与救援系统,能够在较复杂危险的环境中代替人做现场的勘察、检测以及对于现场发生紧急情况时进行及时的处理,有效提高救援工作效率的同时,能够减少救援人员进入危险区域所带来的不必要的伤亡。在救援的同时,也可以将救援现场的情况,及时的反馈给救援总部,让总部第一时间了解灾害现场的总体情况,并做出合理的判断和救援部署,节约了救援时间,最大程度上减少了人员生命危险和经济财产上的损失。
参考文献:
[1] 基于废墟结构特征的灾后救援机器人设计研究[J]. 孟凯宁;舒畇溦;杜成群.包装工程,2022(24)
[2] 基于AHP/QFD与TRIZ的地震救援机器人设计[J]. 李晓杰;梁健;李海泉.机械设计,2021(11)
[3] 危险环境下救援机器人技术发展现状与趋势[J]. 葛世荣;朱华.煤炭科学技术,2017(05)
[4] 一种越障救援机器人的设计[J]. 许江长;张林;陈旭;王喆;叶大鹏.制造业自动化,2015(22)

 京公网安备 11011302003690号
京公网安备 11011302003690号


