



- 收藏
- 加入书签

基于毫米波雷达的快递物流车辆装载率监控方法
 打开文本图片集
打开文本图片集
摘要:随着我国快递物流行业年业务量突破1300亿件,提升车辆装载率已成为企业优化资源利用、降低运输成本的核心任务。传统方法依赖人工目测或静态称重,存在实时性差、误差大、场景适应性弱等缺陷。本文提出一种基于毫米波雷达的智能化车辆装载率监控系统,通过高精度点云数据采集、深度学习驱动的三维建模及动态自适应切片积分算法,实现复杂货物场景下的实时装载率计算。实验表明,系统在三维建模精度(Chamfer距离<0.5cm)、体积计算误差(规则物体<2%,不规则物体<5%)及响应速度(单件处理<0.5秒)方面均显著优于现有技术,且支持动态异常监测。该研究为物流企业提供了高效、可靠的技术支持。
关键词:毫米波雷达;快递物流;装载率监控;三维点云建模;动态切片积分;多模态融合
1.研究背景
1.1行业背景与痛点分析
根据国家邮政局2023年统计数据显示,我国快递业务量同比增长12%,但物流企业平均车辆装载率仅为65%-70%,远低于发达国家85%的平均水平。低装载率直接导致运输成本增加15%-20%,并加剧碳排放问题。
传统的装载率监控方法存在以下痛点。(1)人工依赖性强,需经验丰富的操作员估算货物堆叠方式,效率低下且主观误差大。在实际操作中,不同操作员对于货物堆叠方式的判断差异较大,导致装载率的估算结果参差不齐,无法准确反映车辆的实际装载情况。(2)静态测量局限,称重法无法反映空间利用率,忽略货物间隙与形态变化。这种方式仅仅关注货物的重量,而对于货物在车厢内的实际占用空间以及货物之间的间隙等情况无法有效监测,使得车辆的空间资源未能得到充分利用。(3)复杂场景失效,不规则货物(如软包、异形件)及混合装载场景下,传统算法难以准确建模。当面对形状各异、材质不同的货物混合装载时,传统的监控方法难以准确识别和计算每一件货物的体积和位置,从而无法准确计算装载率。
1.2技术现状与创新
毫米波雷达凭借其高分辨率(毫米级精度)、强穿透性(可穿透非金属包装)及动态感知能力,成为车辆内部空间监控的理想选择。现有研究多聚焦单一技术环节,如点云分割或体积计算,缺乏端到端系统集成。
本文的内容包括以下创新点。(1)多传感器融合。结合毫米波雷达点云、车载IMU(惯性测量单元)及GPS数据,实现动态环境下的鲁棒建模。通过融合多种传感器的数据,可以充分发挥各传感器的优势,提高系统对车辆行驶状态和货物装载情况的感知能力,从而实现更准确的建模。(2)自适应算法优化。基于曲率分析与注意力机制的动态切片积分算法,平衡计算效率与精度。该算法能够根据货物的形状和曲率自动调整切片间距,在保证计算精度的同时,提高计算效率,满足实时监控的需求。(3)边缘-云协同架构。通过轻量化模型部署与云端数据聚合,支持大规模车队实时监控。这种架构将部分计算任务放在车辆边缘进行处理,减少数据传输量,提高响应速度;同时将重要数据上传至云端进行存储和分析,实现对大规模车队的统一管理和监控。
2.相关技术综述
2.1毫米波雷达技术对比分析
毫米波雷达(24-100GHz频段)与其他主流传感器的性能对比如表1所示。毫米波雷达在成本与动态感知能力上的综合优势,使其成为物流车辆监控的首选。在实际应用中,激光雷达虽然精度高,但成本昂贵且抗干扰性弱,不太适合复杂的物流运输环境;RGB-D摄像头分辨率较低,在远距离和复杂环境下的表现不佳;而毫米波雷达能够在保证一定精度的前提下,适应各种复杂的环境,并且成本相对较低,更适合物流车辆的装载率监控。
2.2三维点云处理技术
三维点云数据是由大量离散的点组成,这些点包含了物体表面的几何信息。点云数据处理技术包括点云滤波、特征提取、配准、分割等,旨在从原始点云数据中提取出有用的信息,为后续的三维建模和分析提供基础。
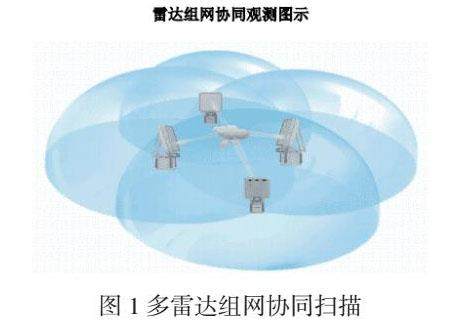
点云处理流程涵盖数据采集、预处理与特征提取。(1)数据采集:采用多雷达组网协同扫描观测,消除盲区,如图1所示。(2)降噪滤波:结合双边滤波与统计离群点去除(SOR),保留有效数据。(3)特征增强:通过法向量聚类(K-means)与曲率分析,识别货物边缘特征。
点云处理技术经历了从传统算法到深度学习的跨越式发展,景会成等【1】针对传统ICP算法配准时间较长,并且当两片点云初始位姿相差较大时易陷入局部最优的问题,提出了一种基于3DHarris关键点结合快速点特征直方图(Fast Point Feature Histogram,FPFH)特征改进的点云配准方法。钱博等【2】为解决传统迭代最近点(ICP)算法对点云配准的起始点对选择不佳而导致配准时间长、效率低的问题,提出一种基于尺度不变特征变换(SIFT)特征点提取的ICP点云配准算法(ST-ICP)。这些传统方法在处理简单场景时具有一定的效果,但在面对复杂的货物形状和多样的装载场景时,由于人工设计的特征难以全面描述物体的特征,导致匹配和配准的精度较低。
随着计算机技术的发展,基于深度学习的点云处理方法得到了广泛应用与发展。深度学习方法以PointNet++、DGCNN为代表,通过端到端学习自动提取全局与局部特征,显著提升复杂场景建模能力。深度学习方法能够自动学习点云数据中的特征,对于复杂场景下的物体建模具有更好的适应性和准确性,能够更准确地还原货物的三维形状和位置。
2.3体积计算算法
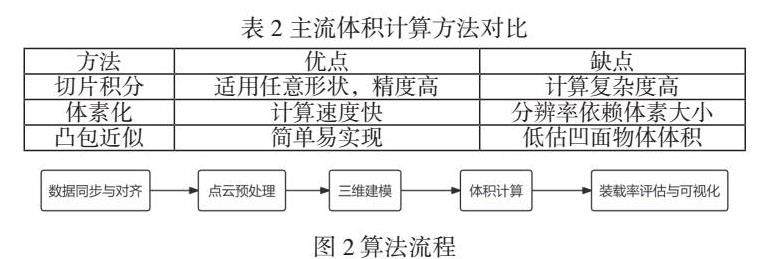
主流体积计算方法可分为三类。(1)体素化法。将点云转换为规则体素网格,通过计数有效体素估算体积,速度快但精度受限于体素大小。体素化法在处理大规模点云数据时具有一定的优势,能够快速得到体积的估算值,但由于体素大小的限制,对于一些形状复杂的物体,其计算精度会受到较大影响。(2)凸包近似法。构建最小凸包包围物体,计算其体积,简单但低估凹面物体真实体积。凸包近似法在处理一些简单形状的物体时计算简单,但对于具有凹面的物体,由于凸包无法完全贴合物体表面,会导致体积的低估。(3)切片积分法。沿特定方向切片并积分,精度高但计算复杂度随物体复杂度增加。切片积分法通过对物体进行切片并积分的方式计算体积,能够较好地处理复杂形状的物体,但计算过程较为复杂,计算时间较长。
常见的体积计算方法各有优缺点,对比如表2所示。
3.算法设计
3.1算法流程
算法流程框架分为五阶段,如图2所示,涉及数据同步与对齐、点云预处理、三维建模、体积计算、装载率评估与可视化,具体如下。
3.2 数据同步与对齐
通过时间戳同步雷达与IMU数据,采用卡尔曼滤波消除车辆振动干扰。由于车辆在行驶过程中会产生振动,这会影响雷达和IMU数据的准确性,通过时间戳同步和卡尔曼滤波可以有效地消除这些干扰,确保数据的准确性和一致性。
3.3 点云预处理
数据预处理涉及离群点剔除、体素降采样、背景分割等过程,具体如下。首先,离群点剔除,基于统计滤波(均值±3σ)移除噪声点。在点云数据中,可能存在一些由于测量误差或其他原因产生的离群点,这些点会影响后续的处理结果,通过统计滤波可以有效地去除这些离群点。其次,体素降采样,将点云分辨率统一至2cm,减少后续计算量。在保证点云数据能够准确反映货物形状和位置的前提下,通过体素降采样可以降低数据量,提高计算效率。最后,背景分割,利用RANSAC算法分离车厢内壁与货物点云。通过RANSAC算法可以准确地识别出车厢内壁的点云,将其与货物点云分离,以便后续对货物点云进行单独处理。
3.4三维建模
基于改进的PointNet++网络生成网格模型,引入SE注意力模块增强特征表达能力。改进后的PointNet++网络能够更好地学习点云数据的特征,生成更准确的三维网格模型,而SE注意力模块的引入则进一步增强了模型对重要特征的关注能力,提高了建模的精度。
3.5体积计算
体积计算部分涉及到主方向确定,动态切片生成,轮廓拟合与积分等,具体如下。(1)主方向确定。通过PCA分析获取物体主轴线方向,PCA分析可以帮助确定物体的主要方向,为后续的切片和体积计算提供基础。(2)动态切片生成。根据局部曲率调整切片间距(0.5-2cm)。根据物体不同部位的曲率动态调整切片间距,能够在保证计算精度的同时,减少不必要的计算量。(3)轮廓拟合与积分。采用B样条曲线拟合切片轮廓,结合辛普森法则计算体积,B样条曲线能够很好地拟合切片轮廓,再结合辛普森法则进行积分计算,能够准确地得到物体的体积。
3.6装载率评估与可视化
实时计算总体积与车厢容积比值,生成三维热力图与异常报警信号。通过计算货物总体积与车厢容积的比值,可以得到车辆的装载率,同时生成三维热力图可以直观地展示货物在车厢内的分布情况,当出现异常情况时,及时发出报警信号。
3.7硬件系统设计
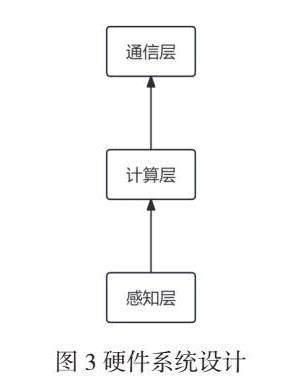
系统硬件由感知层、计算层与通信层构成(图3)。
(1)感知层
部署4台TIAWR2243毫米波雷达(77GHz,角分辨率0.1°),覆盖车厢前、后、左、右四个方位,消除扫描盲区。这4台毫米波雷达能够全方位地对车厢内部进行扫描,获取详细的点云数据,确保不会遗漏任何货物信息。
(2)计算层
采用NVIDIA Jetson AGX Xavier嵌入式平台,集成6核CPU与512核GPU,支持并行点云处理与模型推理。该平台具有强大的计算能力,能够快速处理毫米波雷达采集到的大量点云数据,并进行实时的模型推理,为装载率的计算提供支持。
(3)通信层
通过5GC-V2X模块实现毫秒级数据上传,支持云端监控与历史数据回溯。5GC-V2X模块的高速数据传输能力,能够将车辆上的实时数据快速上传至云端,方便管理人员进行监控和分析,同时也可以对历史数据进行回溯,以便对运输过程进行复盘和优化。
4.实验对比与结果分析
4.1实验平台搭建
实验平台搭建需要硬件、测试数据集、对比算法等,具体如下。
(1)硬件环境
模拟厢式货车(载货空间4m×2m×2m),配备2台FAROFocus3D激光扫描仪(体积测量误差<0.1%)作为基准。FAROFocus3D激光扫描仪具有高精度的体积测量能力,能够为实验提供准确的参考数据,用于评估本文提出的装载率监控系统的性能。
(2)测试数据集
包含500件货物(200规则箱体、150圆柱桶、150不规则软包),覆盖常见物流场景。丰富多样的测试数据集能够全面地验证系统在不同货物形状和装载场景下的性能表现。
(3)对比算法
传统体素化法、CloudCompare、凸包优化算法。通过与这些对比算法进行比较,可以更直观地展示本文提出的算法在三维建模精度、体积计算误差和计算效率等方面的优势。
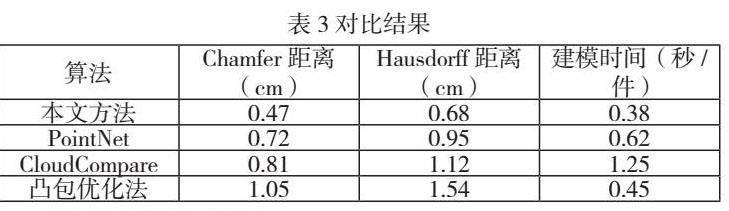
4.2三维建模性能评估
表3展示不同算法的建模精度与效率对比。
4.3体积计算误差分析
针对不同形状货物的测试结果如下。
(1)规则物体
长方体平均误差1.2%(最大2.1%),圆柱体平均误差1.9%(最大2.7%)。对于规则物体,本文方法能够准确地计算其体积,误差控制在较小的范围内,满足实际应用的需求。
(2)不规则物体
优化前平均误差4.5%,通过动态切片与B样条拟合优化后降至3.2%。通过对动态切片和B样条拟合算法的优化,显著降低了不规则物体体积计算的误差,提高了系统的准确性。
(3)计算效率
单件货物处理时间稳定在0.3-0.5秒,满足实时监控需求。在保证计算精度的同时,系统能够快速地处理每一件货物的体积计算,实现了实时监控的目标。
4.4系统集成测试与场景验证
在模拟运输场景中,系统实现以下功能。
(1)动态装载率监控
刷新频率达10Hz,误差<3%。系统能够实时地监测车辆的装载率,并且具有较高的刷新频率和较低的误差,为物流企业提供了准确的装载率数据。
(2)异常检测
货物倾斜超过15°或堆叠坍塌时触发三级预警(声光报警、云端通知、驾驶员提示)。通过对货物状态的实时监测,当出现异常情况时,系统能够及时发出预警,提醒相关人员采取措施,保障货物的安全运输。
5.结论与展望
5.1研究结论
(1)技术突破
毫米波雷达与深度学习的结合,解决了复杂货物场景下的实时建模难题。通过将毫米波雷达的高精度点云数据采集能力与深度学习的强大建模能力相结合,实现了对复杂货物场景的准确建模,为装载率的实时计算提供了基础。
(2)算法优势
动态切片积分算法将不规则物体体积误差控制在5%以内,优于传统方法。动态切片积分算法能够根据物体的形状和曲率自动调整计算方式,有效地提高了不规则物体体积计算的精度,在实际应用中具有重要的意义。
(3)经济价值
系统可提升车辆装载率至85%以上,预计为中型物流企业年节省成本超200万元。通过提高车辆装载率,能够有效地降低物流企业的运输成本,提高企业的经济效益,具有显著的实际应用价值。
5.2未来研究方向
(1)多模态感知增强
融合毫米波雷达、TOF摄像头与压力传感器,提升遮挡场景下的建模鲁棒性。在实际运输过程中,可能会出现货物相互遮挡的情况,通过融合多种传感器的数据,可以提高系统在遮挡场景下对货物的感知能力,进一步提升建模的准确性和鲁棒性。
(2)边缘智能优化
开发基于FPGA的硬件加速方案,进一步降低系统功耗与延迟。FPGA具有硬件加速的优势,通过开发基于FPGA的硬件加速方案,可以在不降低系统性能的前提下,降低系统的功耗和延迟,提高系统的运行效率。
(3)行业生态构建
联合物流企业制定数据接口标准,推动技术规模化应用。目前,物流行业的信息化程度还存在差异,通过联合物流企业制定统一的数据接口标准,可以促进技术在整个行业的规模化应用,推动物流行业的智能化发展。
参考文献
[1]景会成,王睿宇,张靖轩,等.基于3DHarris-FPFH特征的点云配准方法[J].激光与红外,2024,54(12):1948-1953.
[2]钱博,宋玺钰.基于SIFT特征点提取的ICP配准算法[J].沈阳理工大学学报,2024,43(03):48-54.
基金资助:石家庄邮电职业技术学院科研项目,项目名称:基于毫米波雷达的快递物流车辆装载率监控方法,项目编号:YB2024012
作者简介:孙宁,男,1990年5月生,河北行唐人,讲师,研究方向为大数据分析与智能传感技术。
作者简介:赵月斋,女,1978年2月生,河北保定人,高级工程师,研究方向大数据分析方向。

 京公网安备 11011302003690号
京公网安备 11011302003690号


