



- 收藏
- 加入书签

空地多源点云配准方法对比研究
 打开文本图片集
打开文本图片集
摘要:空地多源点云数据配准结果受点云质量、采集设备等因素影响差异大。为提高多模态数据配准精度与效率,在传统单一数据源配准方法基础上优化,提出多种改进算法。本文以天津师范大学图书馆数据集为研究对象,选择K-4PCS、Super4PCS、GROR算法进行多源数据配准。配准结果与传统目视解译方法下得到的地面激光点云的配准真值进行误差统计,评估旋转误差与平移误差。配准结果显示:精度上,GROR算法效果最好,平均绝对误差为32.18,目视效果仅有建筑物边缘等小部分没有配准成功;效率上,GROR算法的配准用时最少,每站平均用时3.522min,效率最高。
关键词:点云配准;空地一体化建模;多源数据融合;无人机倾斜摄影测量;地面激光扫描
1引言
实景三维是“十四五”时期测绘地理信息服务的重点发展方向。无人机倾斜摄影适用于大范围场景快速建模,如应急测绘和城市级三维重建;地面激光雷达则擅长复杂结构或低纹理区域的高精度数据采集。两者融合可互补优势,推动智慧城市建设。顾广杰等利用无人机倾斜摄影技术快速构建受到自然灾害影响的区域的三维模型,体现了无人机倾斜摄影测量技术在应急测绘保障领域的时效性与真实性[1];谢海荣等对比传统测绘与地面三维激光扫描技术在不动产测绘中应用的精度,肯定了后者在不动产测绘作业中的精度与效率提升。彭仪普等将无人机航摄点云与地面激光扫描点云数据融合建立出高精度桥梁三维实景模型[2];梁芳等结合无人机倾斜摄影与地面三维激光扫描技术对历史建筑进行数字测绘建档[3]。然而配准结果受到点云质量和采集设备等因素影响存在较大差异。任大伟等发现集成不同传感器的配准结果可明显提高建模完整度和精度,融合后的点云信息量也远超单一传感器的探测量[4]。
多模态数据的融合方法仍在探索阶段。单一数据类型点云配准算法ICP及其改进算法(如Fast-ICP、Robust-ICP)通过迭代计算刚体变换矩阵实现配准,但依赖初始位置且易受噪声干扰。近年来,研究者们针对收敛性、鲁棒性和效率等问题进行大量优化,提出多种改进算法,如Fast-ICP、Robust-ICP和Global-ICP等。窦建波等尝试通过统一坐标系和ICP法进行两种技术的融合,得到了较完整、较高精度的大型建筑物模型[5];经皓然等采用PCA+ICP的配准方法完成了异形建筑的配准,但仍存在同名点匹配需人工干预、匹配结果影响配准精度与速度的问题。在对地面激光扫描的数据集的配准中Zhihua Xu等[6]尝试K4PCS算法, Nicolas Mellado等[7]在大尺度的数据集中验证Super4PCS算法,Li Yan等[8]完成GROR算法的模拟,都得到了处理效率和配准精度更优的结果。本文希望通过验证更多不同的配准方法,为空地多源点云的融合算法选取提供参考
2研究方法
2.1 点云配准算法
本研究选用K-4PCS、Super4PCS、GROR算法进行空地点云配准有效性评估:
K-4PCS算法基于四点共面原则,通过四叉树结构筛选共性点,构建基点集并匹配目标点云,计算变换矩阵。
Super4PCS算法通过约束角度范围减少了传统4pcs法中寻找匹配对时无效匹配对的产生,在最优线性时间内完成配准,适合大尺度数据。同时,该算法所提出的数据结构可自然扩展到更高维度,并允许统一处理空间和角度邻近性查询。
GROR算法基于对应图可靠性策略,通过节点和边可靠性分析剔除异常值,结合宽松约束加速计算,提升配准稳健性。为了模拟真实情况,算法在目标点云中添加高斯噪声和随机生成的异常值。通过计算节点可靠性和边可靠性,将异常值从对应图中去除。最后通过计算配准结果的旋转误差、平移误差和运行时间来评估算法的性能。
2.2 精度评估
本实验用地面三维激光配准真值得到的变换矩阵与上述算法配准得到的旋转矩阵和RMSE进行误差评估。
地面三维激光配准真值,采用相邻两站点云进行配准的方式,使用CloudCompare软件进行手动配准。统一以摄影测量点云为目标点云,地面激光点云为源点云。在研究区建筑物的角点、突出结构选择20组同名点,平均RMSE小于0.1,求解真值的变换矩阵。
依照真值配准顺序,依次运行K-4PCS、Super4PCS、GROR算法进行配准,得到每一站的RMSE与旋转平移矩阵,将配准结果与地面三维激光配准真值得到的变换矩阵进行误差计算,得到旋转误差、平移误差,由误差结果评估上述算法有效性。
误差评估方面,我们采用广泛使用的质量评估指标来评估配准结果,旋转误差R和平移误差T:
其中和分别表示地面的真实的平移和估计的平移,和分别表示代表地面真实的旋转和估计的旋转,代表矩阵的迹。
3实验结果与分析
3.1研究区情况概述
研究区为天津师范大学主校区图书馆,占地面积11850平方米,建筑面积59530平方米,设计高度为54.9米。建筑物周边有树木和低矮灌木。本研究的算法配准过程均在同一台电脑上完成,其操作系统为Windows 11 家庭中文版,处理器为11th Gen Intel(R) Core(TM) i7-11800H @ 2.30GHz 2.30 GHz,内存为16.0 GB,显卡为NVIDIA GeForce RTX 3050 Laptop GPU。
3.2 数据说明
2023年秋季使用飞马D2000无人机搭载OP5000倾斜摄影航测系统,共计获取503幅影像及位置和姿态(POS)记录无人机相对飞行高度为298m、飞行总面积约2.075km2、航向重叠度为80%、方向重叠度为70%。当日天气晴朗无云。
3.2.1无人机倾斜摄影测量
飞马机器人倾斜摄影测量系统采用多相机协同作业模式,主要参数配置如下:搭载5台SONY A7R4相机,传感器尺寸为35.7 mm×23.8 mm,单像元大小为3.76微米,图像分辨率为9504×6336像素;底视相机焦距为40 mm,斜视相机焦距为56 mm,斜摄像头平铺角设置为45°;地面样本距离(GSD)为3 cm,可满足高精度三维建模需求。
影像数据处理基于Metashape软件完成:首先对倾斜摄影获取的多视角影像进行特征点提取与图像匹配,通过相对定向建立影像间的几何关系;随后结合POS(定位定姿系统)数据与地面控制点,执行光束法区域网平差优化空三精度;最后通过密集匹配算法生成高密度点云数据,为后续实景三维建模提供基础数据支撑。
3.2.2 地面三维激光扫描测量
2023年5月使用RIEGL VZ-1000 三维激光扫描仪,围绕研究区顺时针扫描,共获取30站点云数据。扫描当日天气晴朗少云,周围人流量较少;在实地扫描中未加靶标;每站扫描点约4000万;相邻测站间的扫描范围重叠面积大于30%;部分站点存在植被遮挡情况。
3.3 点云配准结果与分析
3.3.1 点云配准参数设置
将三种算法配置不同参数依次运行同一站研究区,记录误差结果,得到最优配准参数如下:
K-4PCS算法:重叠度overlap为0.6、点密度delta为3、迭代样本数量Number of Samples为300、下采样分辨率resolution为0.9。
Super4PCS算法:重叠度overlap为0.8、点密度delta为4、迭代样本数量samplesize为100。
GROR算法:下采样分辨率resolution为0.4、迭代样本数量n_optimal为800。
3.3.2点云配准精度对比分析
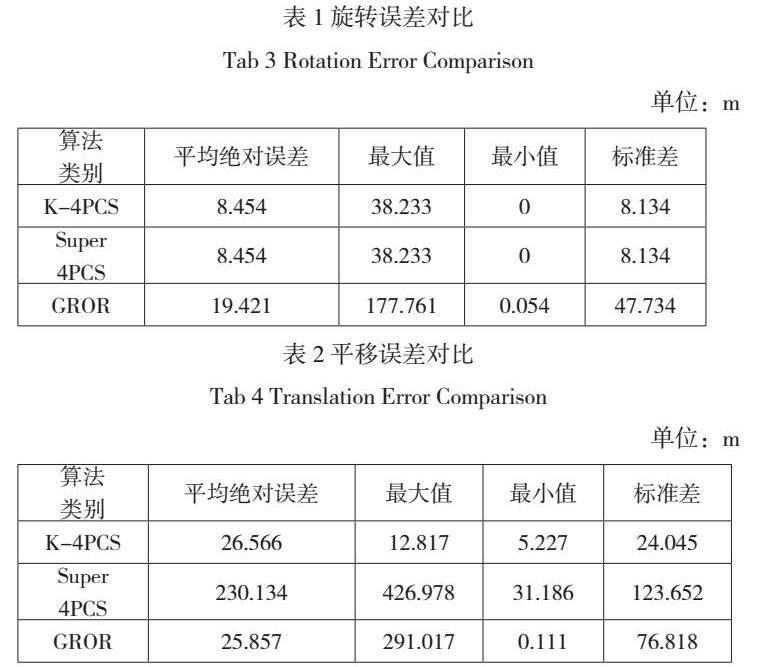
对三种算法的旋转误差统计结果(表1、表2)分析表明,K-4PCS与Super4PCS算法在本数据集上的配准性能高度一致:两者旋转误差的均值、标准差、最大值和最小值分别为8.454米、8.134米、38.233米和0.000米。究其原因,可能与数据预处理阶段的操作共性相关,该过程通过消除初始坐标差异,降低了两算法对初始位姿的敏感性,从而提升了配准一致性。
三种算法配准结果的均值、标准差以及误差值所处区间的跨度表现为K-4PCS>GROR>Super4PCS。
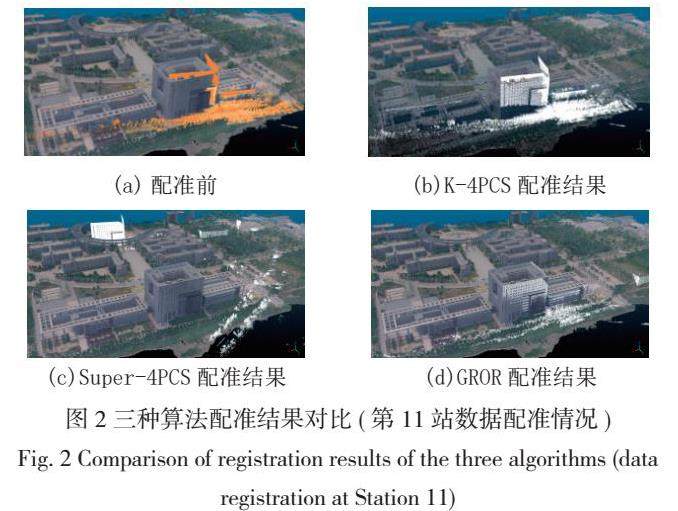
图 2 显示了三种算法对第11站点云的配准结果对比。从配准效果的角度来看,K-4PCS算法配准后与配准前几乎没有变化;Super4PCS算法配准的效果极差,甚至连特征明显的建筑物都没有配准成功;相较而言,GROR算法配准的效果最好,仅有建筑物边缘等小部分没有配准成功。
结合三种算法配准的效果反观误差统计结果,尽管从误差统计数值上来看,GROR算法的配准结果介于K-4PCS算法和Super4PCS算法之间,但其实际配准效果要明显优于其余两种算法,说明GROR算法配准误差统计受到个别站(如第15、25、28站等)误差较大数据的影响。
3.3.3K4PCS、Super 4PCS和GROR配准效率对比分析
统计三种算法对本数据集配准的平均时间,其中K-4PCS算法配准平均用时12.599min/站、Super4PCS算法配准平均用时5.433min/站、GROR算法配准平均用时3.522min/站,GROR算法的配准用时最少,效率最高。
参考文献:
[1]顾广杰,姜坚,陶占杰.无人机倾斜摄影测量技术在应急测绘保障中的应用[J].测绘通报,2017,(S1):100-101+110.
[2]谢海荣,沈书铭,许亚军等.地面三维激光扫描技术在农村不动产测绘中的应用研究[J].测绘与空间地理信息,2022,45(06):246-248.
[3]彭仪普,李剑,邹魁等.地面激光扫描点云与无人机影像点云融合应用[J/OL].铁道科学与工程学报:1-12[2024-03-25]..
[4]梁芳.空地协同测绘技术在历史建筑数字测绘建档中的应用[J].科技创新与应用,2023,13(27):165-168.
[5]任大伟.联合地面激光雷达点云的无人机倾斜影像密集匹配及两类点云融合技术[D].武汉大学,2022.
[6]窦理波,邱华萍,王祯.倾斜摄影与地面三维激光扫描数据融合建模[J].天津城建大学学报,2022,28(04):292-296.
[7]Z. Xu, E. Xu, Z. Zhang and L. Wu, “Multiscale Sparse Features Embedded 4-Points Congruent Sets for Global Registration of TLS Z. Xu, E. Xu, Z. Zhang and L. Wu, “Multiscale Sparse Features Embedded 4-Points Congruent Sets for Global Registration of TLS Point Clouds,” in IEEE Geoscience and Remote Sensing Letters, vol. 16, no. 2, pp. 286-290, Feb. 2019.
[8]Mellado N, Aiger D, Mitra N J. Super 4pcs fast global pointcloud registration via smart indexing[C]//Computer graphics forum. 2014, 33(5): 205-215.
[9]L. Yan, P. Wei, H. Xie, J. Dai, H. Wu and M. Huang, “A New Outlier Removal Strategy Based on Reliability of Graph for Fast Point Cloud Registration,” in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 7, pp. 7986-8002, 1 July 2023.
基金项目:天津师范大学大学生创新创业训练计划资助项目 项目出处“集成无人机倾斜摄影测量与地面三维激光扫描测量的复杂城市区域建筑精细三维重建”(项目编号:202310065142)最终研究成果。项目级别:市级
作者简介:郭晓晨(2003-),女,地理信息科学专业,主要研究方向为多源点云数据配准。

 京公网安备 11011302003690号
京公网安备 11011302003690号


