



- 收藏
- 加入书签

助老服务机械手及其运动控制研究
 打开文本图片集
打开文本图片集
摘要:近年来,我国人口老龄化进程加快,我国养老服务行业的发展呈现出需求结构不断变化、服务对象不断扩大的态势。助老服务机械手作为一种新型的机械手,具有操作灵活、使用便捷、工作可靠等优点,在我国养老机构和居家养老服务中有着广泛应用。为此,本文将通过研究助老服务机械手结构特征和工作原理,以实现机械手在助老服务中的运动控制、姿态控制和机械臂操控等工作特性和效率为目标,分析了各机械臂控制方式、主要参数等因素导致其运动性能不同;针对助老服务机械手不同机械臂控制方式导致其结构复杂、功能有限等问题,提出了适合于助老服务机械手动态控制技术及运动控制方法等解决方案。
关键词:助老服务机械手;智能控制;身体协调性特征
引言:随着我国老龄化进程加快,传统养老方式面临严峻挑战,与传统养老方式相比,越来越多的老年人需要专业的护理和照顾,以促进身体健康与生命安全。同时我国养老服务业行业在发展中也面临着诸多问题,如养老产品研发不足,现有产品结构单一、功能单一等问题亟待解决。而助老服务机械手作为一种新型机电一体化设备,具有体积小、重量轻、工作可靠等优点,能够在短时间内完成各种重复性工作,所以,当前针对助老服务机械手的技术研究具有一定的参考价值。
一、机械手设计方法及关键技术分析
在完成机械手的设计过程中,要结合不同工程领域对机械系统提出的要求,进行机械手结构设计的方法可以分为:结构简化设计法、曲面简化建模法以及有限元仿真分析法。此外,随着计算机技术的不断发展,如今的设计师在进行机械手结构设计时可以借助该方法进行。虽然该方法主要是通过绘制模型图来对机械手进行分析,但其方式相对比较繁琐。针对这种设计方法而言,除了上述提到“曲面优化”这一类较常用的方法外,还可以利用 CAD软件及 AutoCAD等软件对各种结构形式下机械传动系统和机构进行仿真分析工作。通过以上几种建模方法对机械手结构所提出的要求完成设计任务。本文主要就其中几种比较常见的设计建模及仿真分析手法分别进行阐述和分析。
1.1设计方法
1.1.1曲面简化建模
曲面简化建模方法是利用计算机辅助曲面建模,通过对一些复杂曲面进行建模。该方法在设计建模时是较为常见的一种建模方法。具体操作是利用系统模块以及三维实体模型建立机械机构模型,并以此进行各个部件间的耦合分析。具体来说主要就是利用计算机辅助曲面建模技术进行三维实体的建模分析工作。除此之外,在实际建模过程中,对于一些较复杂的零部件可以采用曲面简化建模方法进行设计,在进行机械手设计过程中,为了能够实现一定的仿真效果以及操作控制指标的要求,需要对机械手所具备的功能以及参数进行一定的分析,需要采用多种不同的仿真效果和分析方法来进行仿真性能判断和分析。
1.1.2有限元仿真分析法
有限元仿真分析法是一种较为常用的设计建模方法,该方法主要是利用软件通过有限元模型的建立和分析得到机械元件的运动及参数值。但该方法的计算过程较为复杂,需要将整个过程分解到各个模块上完成。这一方法还需要借助一定的计算软件进行数据的输入和计算。此外,该方法还需要对整个机械手结构展开分析与研究;对各种类型的机械传动系统进行分析与研究也是这一方法的一项重要内容。通过对机械手不同结构形式进行分析和研究能够得出一些结论来指导后续的设计工作。
1.1.3有限元装配仿真分析
在机械手生产中,要结合机械结构进行相应的装配,而有限元装配仿真分析就是一种有效的装配分析手段。通过该方法将零件进行组装化后将其与实际相结合,对装配过程进行模拟。并且根据实际数据对该工艺进行分析评估。这种方式相比于有限元装配仿真分析来说具有更高的分析精度。
1.2关键技术
1.2.1控制系统
机械手控制系统主要由人机界面、微机、传感器和执行机构组成。人机界面是计算机控制的基本原理和方式,是使用人机对话实现人机交流、自动控制和决策执行机构的主要方法。人机界面作为人机交互系统的重要组成部分,在机械手臂上是最重要的控制元件之一。人机界面主要采用 MIUI开发板来实现机械手臂操作功能(人机对话)、进行人机界面交互操作实现任务执行(任务完成)、进行机械手臂自动运动控制(自动完成运动控制)。微机是作为控制元件和执行机构来实现机械手控制功能的主要媒介,因此微机控制系统是最主要的技术之一,其控制原理主要是基于微机控制原理来实现机器人移动过程中的各项操作控制功能。
1.2.2驱动系统
机器人驱动系统包括机械传动装置、液压系统和控制系统。随着工业自动化程度不断提高,对设备的驱动要求也越来越高。这就要求驱动系统必须具有精度高、结构紧凑、寿命长、节能环保、价格低廉等优点。机械手的驱动系统主要由伺服电机等组成。其中,电机一般都是变频驱动或全变频驱动。
1.2.3控制界面设计
对其进行控制界面设计是指对控制程序及执行机构进行组合以实现对机器人的准确控制。例如,在汽车控制器上使用 ECM控制方法后,能够快速完成机器人动作、降低机械手运行中的故障率、提高自动化水平。但同时也要对控制界面进行一些优化改进。以汽车控制器为例,该控制器通过对各系统中运行参数的综合优化及对各系统控制逻辑的优化设计,在保证性能稳定的前提下实现了高速、高精度、多功能控制,提高了控制器的稳定性和使用性能,优化了控制器的可靠性以及用户界面空间利用率。
1.2.4液压系统压力控制方法及设备
液压系统是在压力和速度的控制下,使物体运动的动力装置。机械手在工作过程中对压力和速度的要求十分严格,尤其是在运动中有一定的工作速度和高度要求。它通过液压油泵产生压力,驱动力矩将物体运动。所以对于机械手而言,其需要具有较高的工作速度和高度。因此,对液压系统的压力控制方法及设备需要有更高的要求。采用对液压油箱和油路的设计方法不仅能保证工作速度,而且还能确保能够减轻一定的劳动强度。
二、基本结构和工作原理
本文主要研究的助老服务机械手为上下关节对称的四轴旋转机械手,齿轮与齿条之间通过连接销孔连接而成动力传动传递部件和制动器连接。通过齿轮传动的动力传给减速齿轮完成传动机构并带动齿轮转动;同时通过齿轮组进行传动,从而实现助老服务中各部位的转动。从而实现了助老服务机械手在不同动作与方向之间的转换。
2.1关节架
关节架由两个关节臂单元组成。臂端安装的是一组关节架单元,两关节臂单元相互独立,在一个关节臂上可以完成多个关节的功能动作。在实际运用中由于老人行动不灵活,所以无法实现多关节间的配合与协调运动过程,所以需要设计多个关节臂单元来实现关节之间的配合以及运动过程中各关节间的协调。而手臂臂端的关节架采用三对滑环来实现关节间的相互传动。
2.2驱动系统
其中,驱动系统的传动方式有液压传动和齿轮传动两种。液压传动的方式采用液压泵和活塞连杆等传动部件进行传动。而齿轮传动主要采用两种方式:一种是齿轮与减速器啮合,齿轮啮合产生动力;另一种是齿轮与齿条连接,齿轮由齿条之间传给齿轮传递热量,保证其运转。齿轮传动包括两个步骤:一种是齿轮与减速器之间的摩擦力使齿轮啮合从而产生驱动能力;另一种是齿轮组之间传递热量来降低摩擦系数使齿轮咬合并转动。齿轮组间传递热量,以此提高驱动能力;而齿轮组间传递热量,以此提高机构运转性能。这种方式能够使齿轮组转动从而带动机械臂旋转。
2.3控制系统
本项目中主要控制系统采用的是串行通信,每台机械臂内部通过独立的信号连接一个串行通信模块,每个模块独立完成通信功能,其通信方式采用串行通讯,其中每个模块完成对应操作模块动作,实现机械手的手动控制。本系统通过串行通信模块将机械手作为两个独立功能单元连接到一起,在机械手执行某一动作时,每个模块通过完成相应动作触发信号来实现机械手在动作控制上的自动化。各模块之间均能相互协调配合完成工作。但由于机械手在使用过程中会有一定的误差产生,因此在各模块间通过串行通信模块实现信息交换和反馈,从而可以实现机械手对动作过程中存在不足之处地方予以改正,并完善相关功能。
三、现场测试
本文以老年女性用户为测试对象,设计了多功能助老服务机械手,采用不同规格的助老服务机械手进行了在老人家中进行实验测试。助老服务机械手自由度主要通过其操作机独立驱动关节来实现,通过对比试验结果来验证助老服务自由度。其中 MATLAB环境所采集图像包括两个角度分别为80°和90°;伺服电机所采集图像包括两个角度分别为45°、60°;伺服电机将被控物体放入伺服电机输入点,进而实现被控物体静止位置的判断、障碍物移动方向和速度变化控制以及目标位置控制等功能; MATLAB环境下控制器向外输出信号完成被控物体的旋转控制。
3.1环境检测
MATLAB环境作为机械手的真实人机交互环境,包含环境分析、目标定位、运动轨迹分析等功能。其中目标检测是控制机械手运动过程中关键问题之一,在整个过程中起着至关重要的作用,但由于缺乏客观标准,难以衡量其实际效果,故本文将目标检测过程与实际情况进行对比分析。按照实验要求对助老服务机械手完成不同功能场景下环境的检测。在实验测试中,首先对助老服务机械手和周边环境进行对比分析。其中机械手部端口所采集图像是基于激光雷达扫描图像而生成的图片,为了减少图像噪声以及提升图像质量,将其转换为矢量信号转换成 PID控制信号并输出给控制器。最终实现对机械手姿态和速度的控制,以实现需要的功能或者目标。
3.2轮子稳定度
在助老服务机械手的驱动过程中,系统对输入的数据进行了采集。本次实验的驱动器采用MZ860/870P的MZ860系列伺服驱动器,电机采用60ZFHA1-0D40DQNM SV的60系列400w伺服电机,其输出电压为2.9 V,额定功率1W,额定转速为1300(rpm)r/min;伺服电动机为一台型号为60ZFHA1-0D40DQYM-SV的400w伺服电机,额定功率为400W。本次实验中选择三速可调、低转速范围以及高转速下进行了测试。可以得出 MATLAB环境下伺服电机的驱动转矩在不同转速时呈现出明显的波动现象,并且存在一定程度损耗;在低转速及无转矩时将使得系统产生一定偏差且存在动态响应不稳定问题。因此使用6 p.16 r/min为标准伺服电机对输入信号进行转换率为5 Hz时的电压,当输出电压低于10 V时则需要停机且从步态恢复到初始状态,这也会使得系统无法完成正常的运行状态。通过实际对比试验可以看出采用伺服电机进行驱动,虽然机械手的转矩没有达到设定值,但实际误差较小,并且能够达到较高值。
3.3轨迹测量
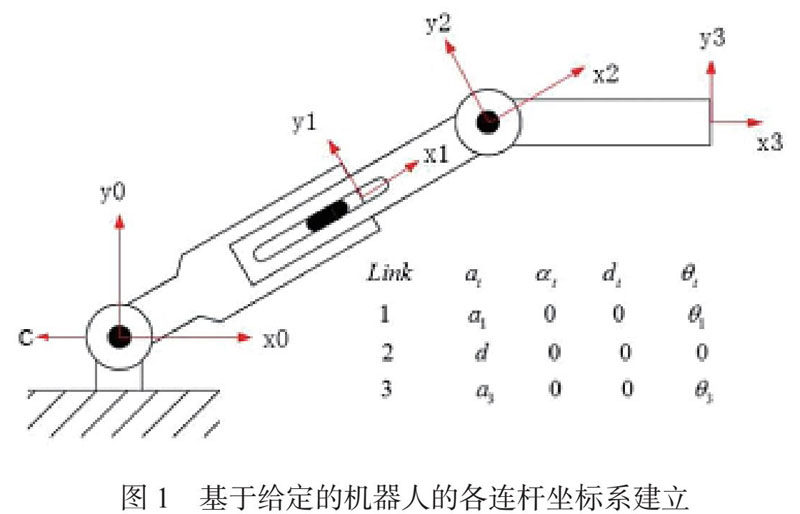
在实验中,需要对助老服务机械手进行定位,并使用Simulink软件测量机械手运动轨迹,其中,坐标系表示机械手初始姿态,是用坐标系中定义的坐标系中最小二乘号的位置;位移为零时,坐标系中的x0,表示当前坐标系中点对点坐标系C位置。具体的基于给定机器人的各连杆坐标系建立如图1所示。
说明当环境发生变化时,助老服务机械手的运动轨迹与初始姿态存在差异。本实验中对机械手与老人接触点的位移值以及对应的速度值进行测量,该轨迹在实际测试中能够满足要求。
3.4旋转测试
通过控制伺服电机的转动速度,控制被控物体以一定角度进行旋转。通过测量得出,若两个方向角度不同,则表示两个方向相反;若两个方向角度相同,则表示有转向。当两个角度相等时,则表示机械手所对应的两个方向是相反的。但由于角度变化较大时会导致机械手无法正常工作。为了验证本文设计的控制器的可行性以及控制方式的有效性,本文进行了旋转测试。
3.5平衡测试
本实验以100 kg体重的老年女性用户为测试对象,用两台台式助老服务机械手进行试验,其中控制器由一台 RTU负责驱动。实验环境为室外环境,空气温度为10℃;测试中分别设置五个模拟场景,其中三个为机械手的运动模式,分别为正常行走模式和减速模式。将被控物体放置在模拟房间中;两台台式助老服务机械手采用对称方式分别摆放在3张桌子上。通过扫描被控对象自身及周围环境时采集图像。其中,直线段为助老服务机械手所走直线垂直于地面时的直线加速度;直线段的一点和两点之间的距离;直线段上与下相交点之间的距离;直线段之间的夹角为0°。为保证测量精度,控制点与被控物体在0°~60°之间任意方位;以±2°为周期来测试被控物体的稳定程度。
四、结语
总之,本文基于助老服务机械手的结构特点,针对我国不同老年人身体特征提出机械臂结构方面优化方案,从而提升机械手在助老服务领域中的应用水平和竞争力及促进老年健康发展。本文旨在解决目前助老服务机械手结构复杂、运行效率不高等问题,为我国养老行业提供新思路和理论指导和参考。
参考文献
[1] 耿洪兴, 张乐年, 谭坚红,等. 基于STC单片机的机械手运动控制研究[J]. 机械制造与自动化, 2010, 40(5):3.
[2] 徐斌. 基于运动控制卡的机械手控制系统研究[J]. 合肥学院学报(综合版), 2010, 20(003):86-88.
[3] 王亮. 搬运机械手运动控制的研究[D]. 太原科技大学, 2012.
本文系2021年贵州大学大学生创新训练项目,大创题目:助老机械控制手套关键技术的研究。大创编号:贵大国创字2021(048)资助。

 京公网安备 11011302003690号
京公网安备 11011302003690号


