



- 收藏
- 加入书签

基于LabView的飞机姿态指示器界面仿真方法研究
 打开文本图片集
打开文本图片集
摘要:飞行姿态指示器界面仿真可为人机交互提供重要的显示载体,同时也可实时反映当前飞机的状态,为保证安全稳定的飞行提供有效的指示。因此本文首先通过分析基于LabView绘制飞行姿态指示器界面时需要完成的功能需求和实现面临的图像旋转处理问题,对图像旋转算法中的最临近插值和双线性插值进行了研究,实验通过采用LabView编程实现飞行姿态指示器的俯仰及倾斜功能,分析对比了基于最临近插值的图像旋转算法和和基于双线性插值图像旋转算法各自对飞行姿态指示器界面仿真的影响。结果表明, 当满足显示效果较好,且图像显示速率不高需求时可选用双线性插值算法,反之则选用最临近插值算法。
关键词:飞行姿态指示器界面;LabView;图像旋转算法;最临近插值;双线性插值
中图分类号:V243 文献标识码:A
飞行姿态指示器主要是用来刻画飞机在飞行过程中的空间位置与方向的一种主要的机载仪表,也是飞行员进行人机交互的重要载体[1,2]。通过姿态指示器可实时的将飞机在不同气象条件下的飞行方向与位置等状态信息传递至飞行员,以便飞行员及时根据该仪器指示的当前飞行状态调整飞机的俯仰或倾斜角度,进而有效控制飞机的安全稳定的飞行。同时相关研究指出通过改善人机交互界面的功能或性能,可有效提高航空安全[3]。而飞行姿态指示器为人机交互各操作提供重要的显示界面,对整个飞行过程中具有重要的指示作用,如文献[3,4]主要研究了无人机飞行姿态显示器对异常的飞行姿态进行恢复存在的影响。因此研究飞机姿态指示器界面仿真方法对航空方面是非常有必要的。
其中LabView是一款在虚拟仪器领域中广泛应用的软件,因其具有高模块化的软硬件功能,使得其性能与可扩展性方面具有较大的优势[5]。同时由于其采用图形化界面编程的思想,使得在实际项目开发中极大的缩减了相关人员编程与调试的时间。这使得LabView在测试测量领域、控制领域以及仿真领域应用广泛,如文献[6,7,8]。尤其在仿真领域,LabView中封装了大量适合于模拟,仿真等工作的数学运算函数[9],因此,在实际工作前,均可通过基于LabView进行试验模拟与仿真,以便提前验证设计的合理性以及仿真效果,从而可实现指示后续工作的开展以及减少后续不必要的重复工作等效果,如文献。
此外,飞行姿态指示器界面是航空测试设备开发中常用界面之一,通常需要测试设备仿真飞行姿态指示器显示当前飞机的姿态,所仿真的飞行姿态指示器需根据俯仰角及倾斜角对图像进行平移旋转。因此本文主要从俯仰和倾斜两个状态进行基于LabView的飞机姿态指示器界面仿真方法的研究。
1 功能分析
飞行姿态指示器需要接收俯仰角和倾斜角的数据,并对数字图像进行处理,在此过程中涉及到图像的平移和旋转。其中图像旋转部分是主要的难点问题。因此在基于LabView进行飞机姿态指示器仿真时,主要关注图像旋转部分的图像处理方法。
但总的来说,基于LabView的飞机姿态指示器仿真首先选用“二维图片”作为其显示控件。然后再在绘制飞行姿态指示器的背景后的基础上,分别根据俯仰角和倾斜角的角度实现对图像平移和旋转处理,最终将计算后的图像显示至“二维图片”控件。
2相关技术原理
图像旋转部分是飞行姿态指示器仿真过程中图像处理时的主要难点问题之一。因此本文主要通过分析不同的图像旋转处理算法来指导实现不同需求条件下的飞行姿态指示器界面的显示仿真。其中图像旋转主要指图像以某一点为中心旋转一定的角度,形成一幅新的图像的过程。图像旋转算法是一种常用的数字图像处理技术。由于在旋转后图像的像素点坐标不再是整数,所以旋转后必须对新的像素点灰度值进行插值运算。目前常用的方法有最临近插值法和线性插值法[10]。
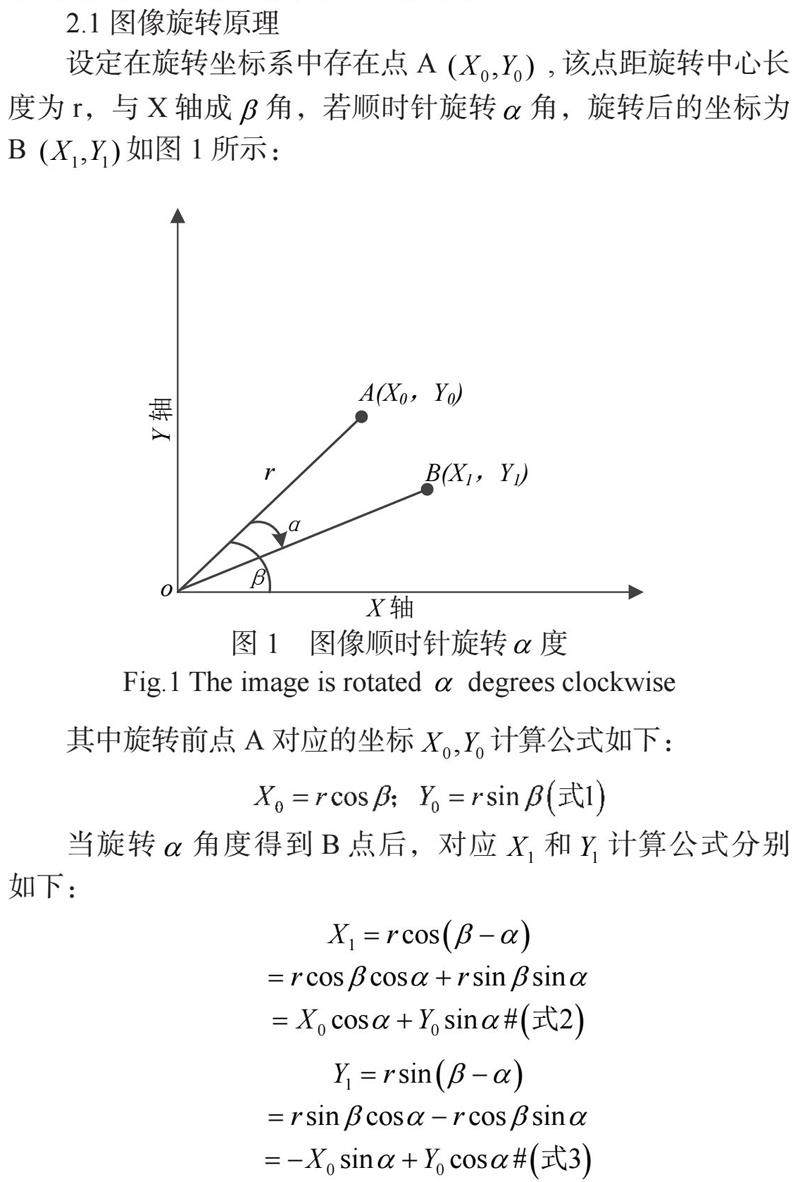
2.1 图像旋转原理
设定在旋转坐标系中存在点A,该点距旋转中心长度为r,与X轴成角,若顺时针旋转角,旋转后的坐标为B如图1所示:
其中旋转前点A对应的坐标计算公式如下:
当旋转角度得到B点后,对应和计算公式分别如下:
由于对于图像的旋转,在计算过程中与会出现浮点型数值,而对于像素点而言,像素的所在位置是整型数据,在计算时会引入误差。
2.2插值原理
2.2.1最临近插值
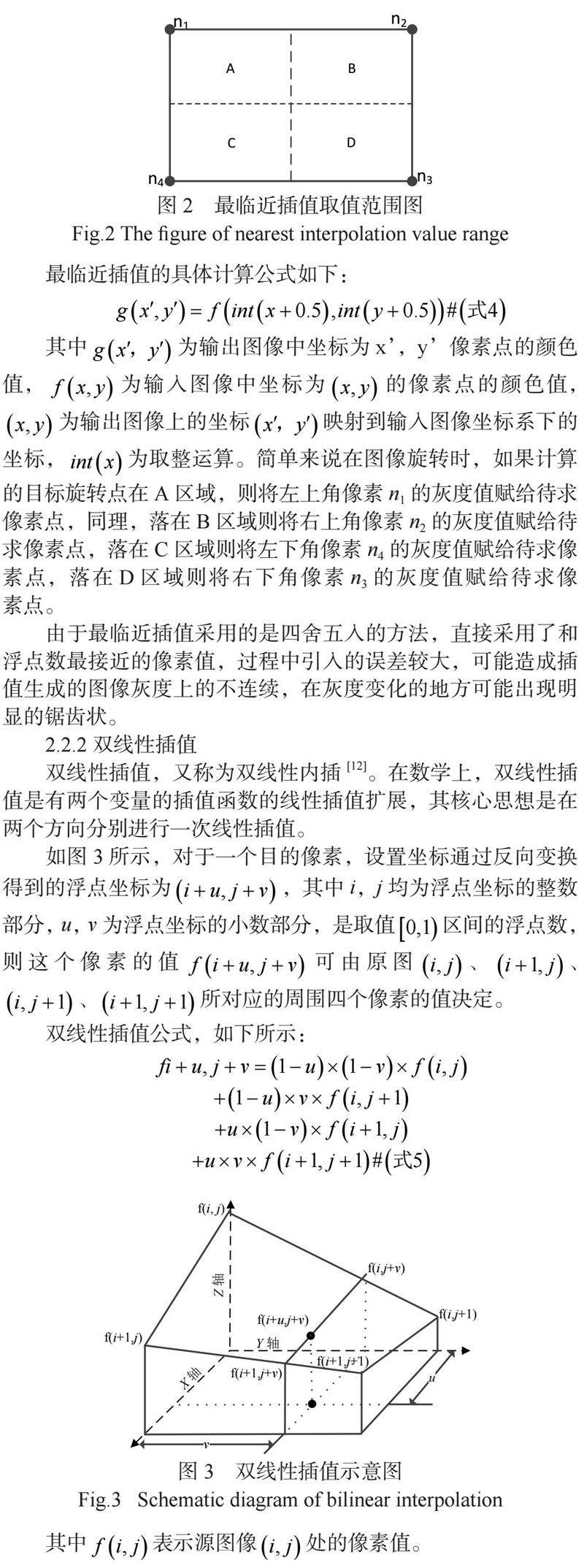
最临近插值法,又称零阶插值[11],该方法取距离输出图像上的像素点映射到输入图像上的位置最近的输入像素的颜色值,作为输出图像上像素点的颜色值,如图2所示,最临近插值法直接计算输出像素映射到输入图像坐标系下的点U和近邻点。
最临近插值的具体计算公式如下:
其中为输出图像中坐标为x’,y’像素点的颜色值,为输入图像中坐标为的像素点的颜色值,为输出图像上的坐标映射到输入图像坐标系下的坐标,为取整运算。简单来说在图像旋转时,如果计算的目标旋转点在A区域,则将左上角像素n1的灰度值赋给待求像素点,同理,落在B区域则将右上角像素n2的灰度值赋给待求像素点,落在C区域则将左下角像素n4的灰度值赋给待求像素点,落在D区域则将右下角像素n3的灰度值赋给待求像素点。
由于最临近插值采用的是四舍五入的方法,直接采用了和浮点数最接近的像素值,过程中引入的误差较大,可能造成插值生成的图像灰度上的不连续,在灰度变化的地方可能出现明显的锯齿状。
2.2.2 双线性插值
双线性插值,又称为双线性内插[12]。在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值。
如图3所示,对于一个目的像素,设置坐标通过反向变换得到的浮点坐标为,其中i,j均为浮点坐标的整数部分,u,v为浮点坐标的小数部分,是取值区间的浮点数,则这个像素的值可由原图、、、所对应的周围四个像素的值决定。
双线性插值公式,如下所示:
其中表示源图像处的像素值。
双线性插值算法计算量大,但是图像处理的质量高,不会出现像素值不连续的情况,由于双线性插值具有低通滤波器的性质,使高频分量受损,所以可能会使图像轮廓在一定程度上变得模糊。
3 实现与验证
LabView实现过程的设计模式选用状态机,状态机包括状态、事件、动作三个基本要件。其中状态是一个抽象的概念,状态在一定条件下或者一定时间内保持不变,等待一个或几个事件的发生;事件是一个瞬时的概念,表示某件事情发生了,一旦有关的事件发生,就要采取某种动作;动作表示一旦事件发生,应该采取何种处理方式,处理的结果通常是转入另一个稳定状态。
3.1状态划分
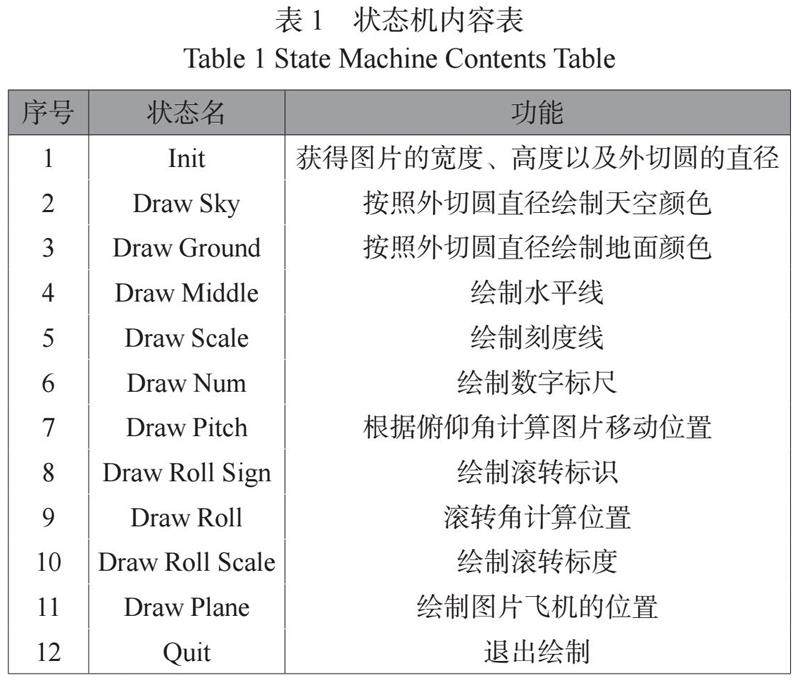
在绘制飞行姿态指示器界面时,只要按照顺序执行就可完成业务,中间无需进行跳转,所以状态机只是替代顺序结构,这种状态机又被称作顺序状态机,顺序状态机是一种最简单的有限状态机,该状态机的特点是转换条件非常简单,一般只有两种方式:一是保持原状态不变;二是转换到下一状态,并不存在状态的较多跳转。飞行姿态指示器界面的状态内容见表1,依次按照状态执行就能完成飞行姿态指示器界面的绘制显示功能。
3.2 俯仰实现与验证
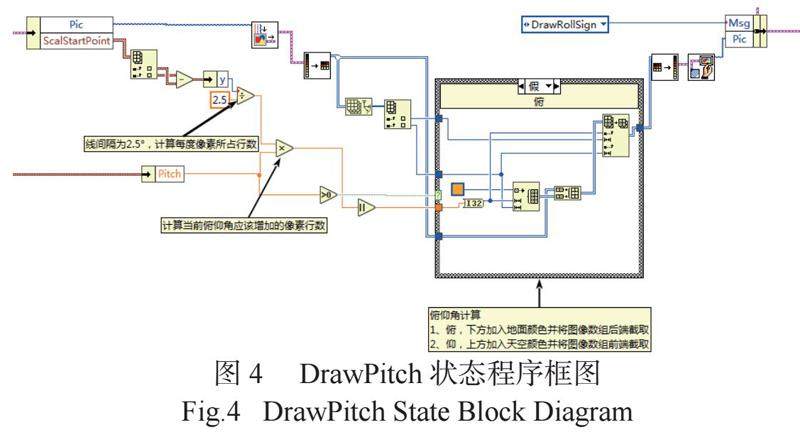
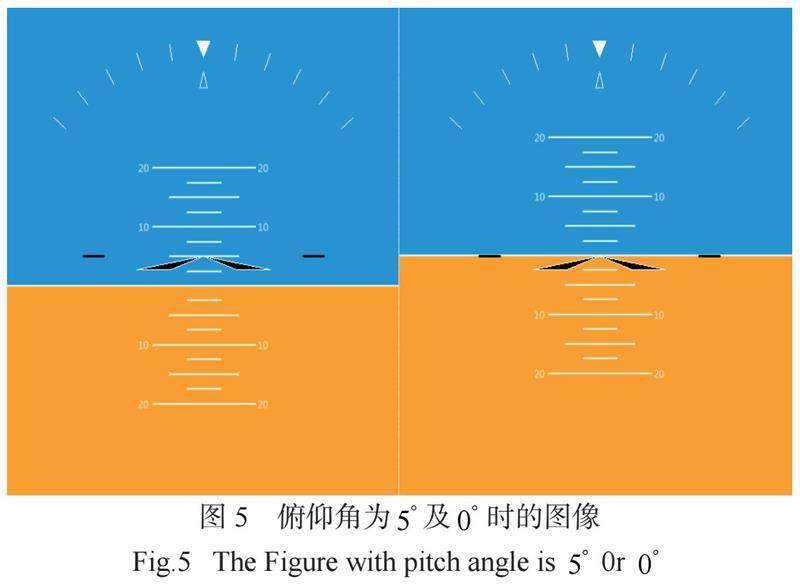
飞机姿态指示器的俯仰角绘制功能是在DrawPitch(绘制俯仰角)状态内实现的。DrawPitch状态程序框图如图4所示,“俯”处理是在图像下方加入地面颜色并将数组后端截取;“仰”处理时在图像上方加入天空颜色并将图像数组前端截取。
将滚转角固定设置为,俯仰角分别设置为及时,对俯仰功能验证,图像对比如图5所示,左侧为俯仰角为5°对应的效果图,右侧是俯仰角为0°对应的效果图。
3.3 倾斜实现与验证
飞行姿态指示器的倾斜功能需要对图像旋转,并对图像数据插值处理。
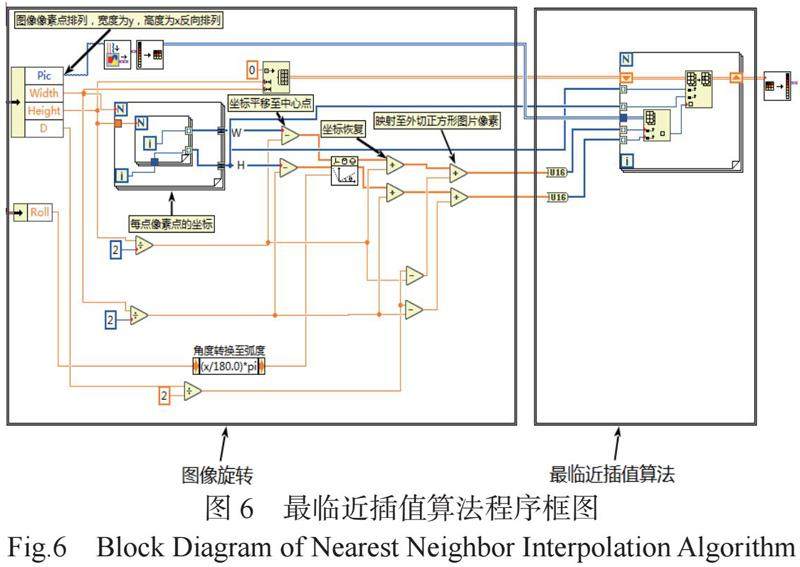
图像旋转实现首先根据图像宽度W和高度H计算图像的像素坐标系,由于图像旋转按照中心点旋转,而界面的坐标原点为界面左上角,需要对坐标系进行平移(X轴平移距离,Y轴平移H/2距离),平移后将坐标轴按照设定的滚转角旋转,旋转后反向平移(X轴平移W/2距离,Y轴平移H/2距离),然后进行映射至外切正方形图的换算。
最临近插值算法和双线性插值算法的程序框图在图像旋转程序是一致的,不同的地方在插值算法部分。
最临近插值算法的程序框图如图6所示,左侧为图像旋转实现内容,右侧为最临近插值算法的程序实现,在最临近插值算法程序框内将浮点型数值通过四舍五入方式转换为整型数据,作为目标像素点。
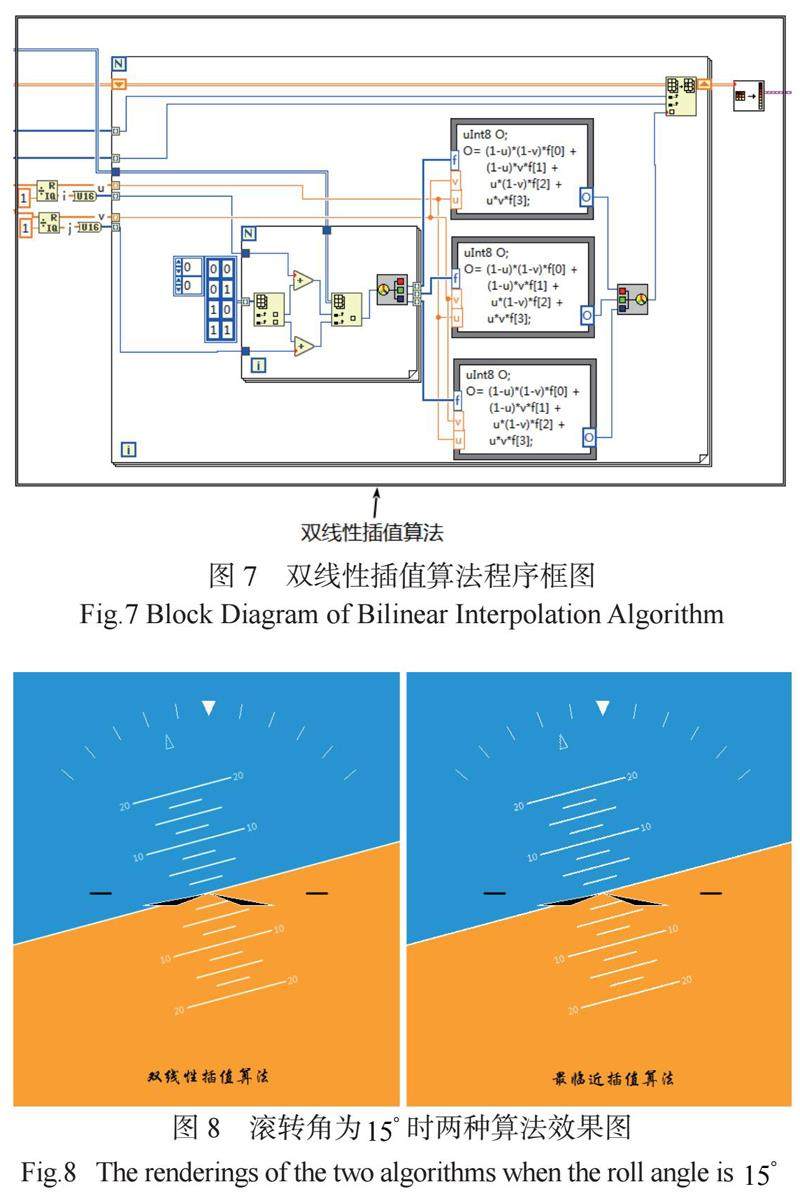
双线性插值算法的程序实现如图7所示,首先分别将X轴坐标与Y轴坐标对1取余数,获得X轴的整数分量i和小数分量u,以及Y轴的整数分量j和小数分量v。分别获得原图、、、所对应的周围四个像素,根据双线性插值算法公式,计算其对应的灰度值,然后得到目标像素点。
最临近插值算法和双线性插值算法在图像旋转时的最终效果如图8所示,左侧为双线性插值算法,右侧为最临近插值算法,可以看出最临近插值算法具有明显的锯齿失真,而双线性插值算法则较平滑。
4 结论
在LabView开发环境下绘制飞行姿态仪界面时,程序需根据俯仰角和倾斜角具体数值实现对图像的平移和旋转,在图像旋转时,可综合考虑双线性插值算法和最临近插值算法,其中最临近插值的方法简单、且计算速度快,但是可能存在生成图像效果较差,有严重的失真问题;而线性插值算法的计算精度较高,生成图像的效果较好,但同样存在计算复杂,速度将相对较慢问题。因此综合而言,如果要求显示效果好,且对图像显示速率要求不高时可选用双线性插值算法,反之选用最临近插值算法,此外本文提供的飞行姿态仪界面绘制方法及程序可应用于图像处理的相关领域。
参 考 文 献
[1] 李想, 乔木, 官巍, 等. 虚拟座舱技术在飞行模拟器中的应用[J]. 系统仿真学报, 2013, 25:129-133.
Li Xiang, Qiao Mu, Guan Wei, et.al. Application of Virtual Cockpit Technology in Flight Simulator[J]. Journal of System Simulation, 2013, 25:129-133.
[2] 徐晨, 李培华, 王再见. 三维虚拟姿态指示器设计[J].光电子技术, 2021, 41(02):115-121.
XU Chen. et.al. Design of Three dimensional Virtual Attitude Indicator[J]. Optoelectronic Technology, 2021, 41(02):115-121.
[3] 陈宏玉. 无机人机飞行姿态显示界面设计对恢复异常飞行姿态操作的影响[D]. 陕西师范大学, 2018.
Chen H Y. Influence of Flight Attitude Display Interface Design without Man-Machine on Recovery of Abnormal Flight Attitude. Shaanxi Normal University, 2018.
[4] 陈宏玉, 高云涛, 戴红, 等. 飞行姿态显示设计对异常姿态恢复操作的影响研究[J]. 中华航空航天医学杂志, 2018, 29(3-4):188.
Chen HongYu, Gao YunTao, Dai Hong, et.al. Research on Influence of Flight Attitude Display Design on Abnormal Attitude Recovery Operation[J]. Chinese Journal of Aerospace Medicine, 2018, 29(3-4):188.
[5] 卞晶. 基于LabVIEW的飞机刹车系统半物理仿真平台设计[D]. 湖南:中南大学, 2013.
Bian Jing. Design of Hardware-In-The-Loop Simulation Platform for Aircraft Braking System based on LabVIEW[D]. Central South University, 2013.
[6] 彭斌, 陈玮. 基于LabVIEW的四旋翼飞行器建模与控制仿真[J]. 工业控制计算机, 2015(11): 68-69, 73.
Peng Bing, Chen Wei. Modeling and control Simulation for Quadrotor Based on LabVIEW[J]. Industrial Control Computer, 2015(11):68-69, 73.
[7] 宋亚男, 黄博才, 徐荣华. 基于LabVIEW的飞行姿态控制实验设计与实现[J]. 实验技术与管理, 2010, 27(9):91-94.
Song Yan’an, Huang Bocai, et.al. The Design and Realization of Experiments on Aircraft’s Attitude Control based on LabVIEW[J]. Experimental Technology and Management, 2010,27(9):91-94.
[8] 陈聪,等. 飞机系统虚拟仿真实践教学平台开发[J]. 实验室研究与探索, 2017, 36(4):83-86.
Chen Cong, Jin Yang. et.al. Development of Virtual Maintenance Simulation PIatform for Airplane Systems[J]. Research and Exploration in Laboratory, 2017, 36(4):83-86.
[9] Aissa Chouder, Santiago Silvestre.Monitoring, Mideling and Simulmion of PV Systems using LabVlEW[J]. Solar Energy, 2013, (5):337-349.
[10] 康牧, 凌凤彩. 一种基于新插值方法的图像旋转算法[J]. 计算机科学, 2013,40(5):303-306.
Kang Mu, Ling Fengcai. Algorithm of Image Rotation Based on New Interpolation Method[J]. Computer Science, 2013, 40(5):303-306.
[11] 李红梅. 基于插值算法的图像缩放技术[J]. 新乡学院学报, 2017, 34(3):31-33.
Li Hongmei. The Realization of Image Scaling Technology Based on Interpolation Algorithm[J]. Journal of Xinxiang University, 2017, 34(3).
[12] 尹雪, 刘思念, 袁春梅, 等. 基于DSP的双线性插值算法在图像旋转中的应用[J]. 舰船电子工程, 2020, 40(3):97-100.
YIN Xue, LIU Sinian, et.al. Application of Bilinear Interpolation Algorithm Based on DSP In Image Rotation[J]. Ship Electronic Engineering, 2020, 40(3):97-100.

 京公网安备 11011302003690号
京公网安备 11011302003690号


