



- 收藏
- 加入书签

基于增强型YOLOv3-tiny的未礼让行人检测算法
 打开文本图片集
打开文本图片集


摘要:近年来, 斑马线前机动车“不礼让行人”的问题引起了社会各界的广泛关注,交通部门治理措施也越来越严厉。传统治理方式为现场执法,需要花费大量的人力物力,且效率低。本文提出了一种增强型YOLOv3-tiny模型,用于在交通监控中进行人、车检测,将此模型在NVIDIA RTX 2080上对1080P的交通视频中检测,检测速度为160帧/s,充分达到实时检测的效果。通过对行人,车辆坐标分析,判断有无违法行为发生。对于违法车辆,保存三张图片作为执法依据,对非现场执法形成了重要补充。
关键词:未礼让行人;YOLOv3-tiny;残差;非现场执法
人行横道前,机动车减速、停车让行人先行本来是基本的交通规则,但目前大多驾驶者还没有养成这个习惯,特别在无信号灯的路口,机动车不礼让行人的情况更为突出。针对此违法行为,目前的检测方法为:1)现场执法;2)设置手控信号灯;3)设置减速带[1]。上述方法需要花费大量人力成本,而且缺乏有力执法证据,使得这些方法在实际应用中收效甚微。为解决上述问题,本论文提出一种基于增强型YOLOv3-tiny的机动车未礼让行人抓拍算法。通过对该系统的布控,可全面监控机动车不礼让行为,成为非现场执法系统的重要补充[2]。
YOLOv3-tiny是YOLOv3的简化版本,优点是计算量小,实时性高,便于集成在嵌入式设备中,缺点是检测准确度较低,其网络结构采用了传统的卷积+池化的形式,主干网络比较浅,不能提取出更高层次的语义特征。本文通过修改YOLOv3-tiny模型中的骨干网络结构,引入深度可分离卷积操作,设计网络基本残差块单元,来增强骨干网络的特征提取能力。
对于未礼让行人检测,首先检测的应是斑马线区域,根据本研究内容的实际情况,监控摄像头位置是固定的,斑马线区域也是固定的,通过提前规划出斑马线区域,可以更快,更稳定的确定斑马线所在坐标。通过YOLOv3-tiny算法,进行车辆和行人检测,以获取相应目标的坐标,再对坐标进行分析,以判断是否有违法行为发生。
1.检测方法
1.1 斑马线检测
基于图像处理的斑马线识别也有许多研究方法,如双极数法、消逝点法、频域特征法等。这些方法对斑马线条纹的直线性要求很高,并且易受光线影响,使夜间将不能正确识别斑马线区域。根据此应用场景的实际情况,对于监控画面,可以通过事先画出斑马线所在图像中的区域,得到其对应的多边形轮廓及所在图像中位置信息。采用此方法,可以避免行人,光线等因素对斑马线识别的影响,为后续的检测奠定了基础。
1.2 车辆、行人检测
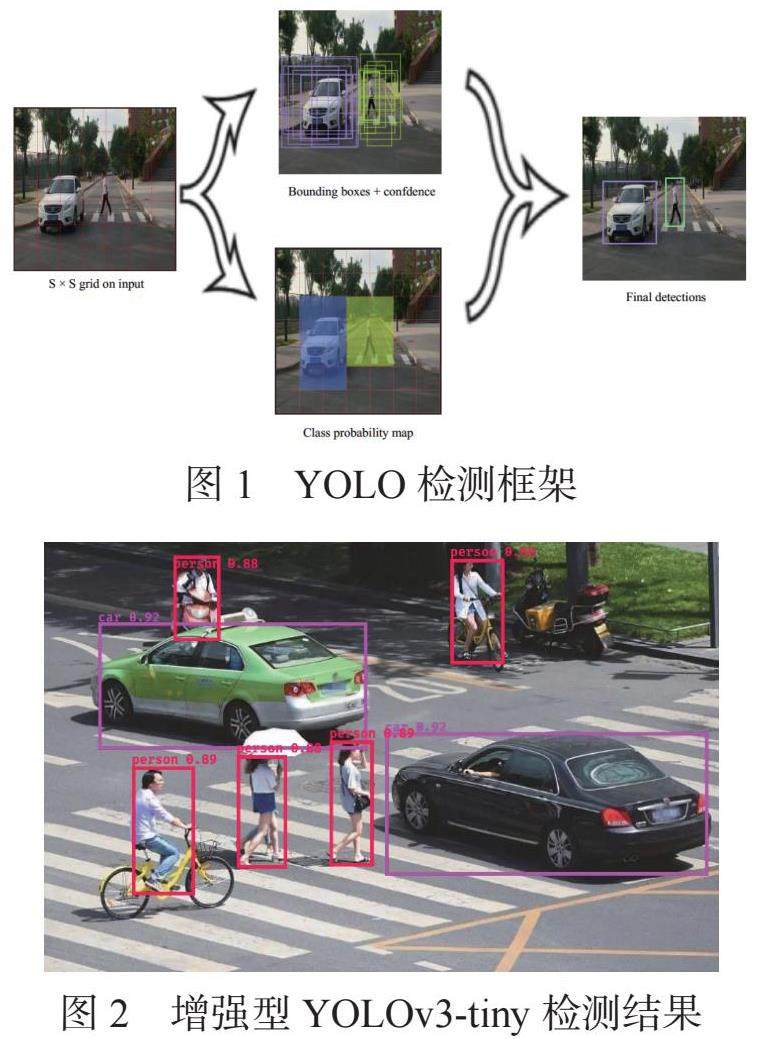
YOLO检测模型如图1所示。在进行检测之间,先将每个图像划分为S×S个网格,当一个物体的中心落在某个网格中时,该网格负责预测这个物体,每个网格预测B个边框及其置信度,以及C类条件概率[3]。如图1所示,将一幅图像划分为7×7,其中(4,4)个网格负责预测这个人。当多个边界框检测到相同的目标时,YOLO使用非最大抑制(NMS)方法来选择最佳边界框。
YOLOv3-tiny因网络层次较少,使得检测速度较快,可以移植到嵌入式设备,但由于网络层数不足导致了检测精度较低[4]。本文通过修改YOLOv3-tiny模型中的骨干网络结构,引入深度可分离卷积操作,设计网络基本残差块单元,来增强骨干网络的特征提取能力。
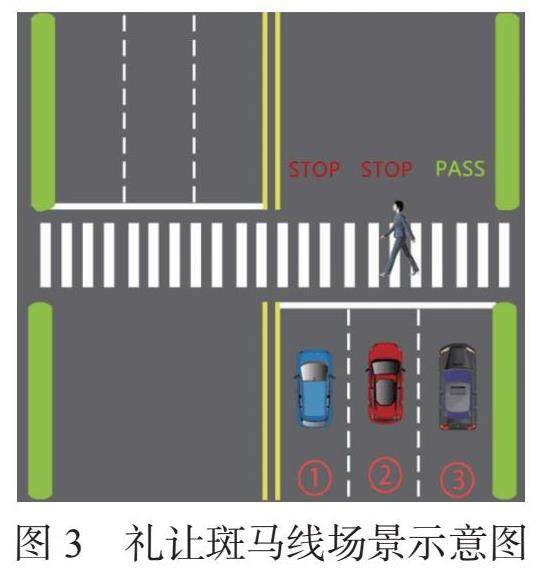
为了更好地处理高分辨率图像,首先将输入图像调整为416×416像素大小,再通过5次降采样,将图像缩小为原来的1/32。最后,YOLOv3-tiny模型在13×13、26×26两个不同的尺度上对包围盒进行了预测。它还对目标类别进行分类,以判断所属类别,并返回外接矩形的坐标以及置信度,其检测效果如图2所示。
2.违法行为的判断
2.1 违法行为界定
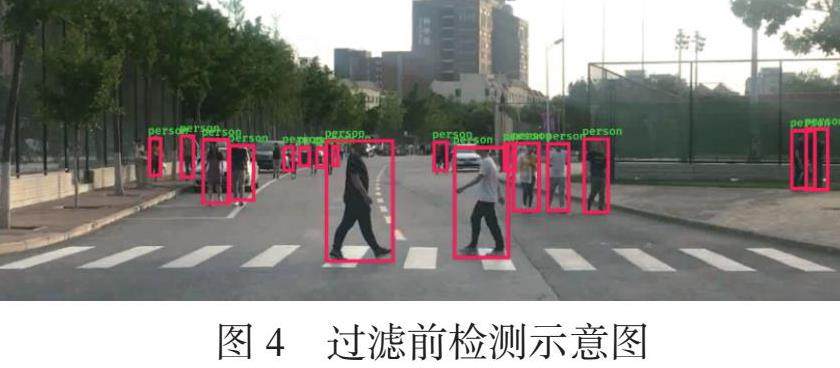
机动车礼让行人的典型场景如图3所示,行人行走方向前向两车道,机动车必须停车让行,即①、②车道需停止通行。行人已经通过了机动车所在的车道,机动车可以通过,即③车道可以通行。
2.2 行人分析
在读取第一帧图像的时候,首先为图中每一个行人进行标号,记录其所在位置的坐标,并判断其运行方向。当行人刚开始出现的时候,其位置坐标在斑马线左边时,其运动方向判断为从左往右过斑马线,当行人刚开始出现的时候,其位置坐标在斑马线右边时,其方向判断为从右往左过斑马线。若开始进行检测时,已有行人在斑马线上,则首先记录其所在坐标,通过下一帧中,此人坐标与刚出现时坐标做差,来判断行人方向[5]。
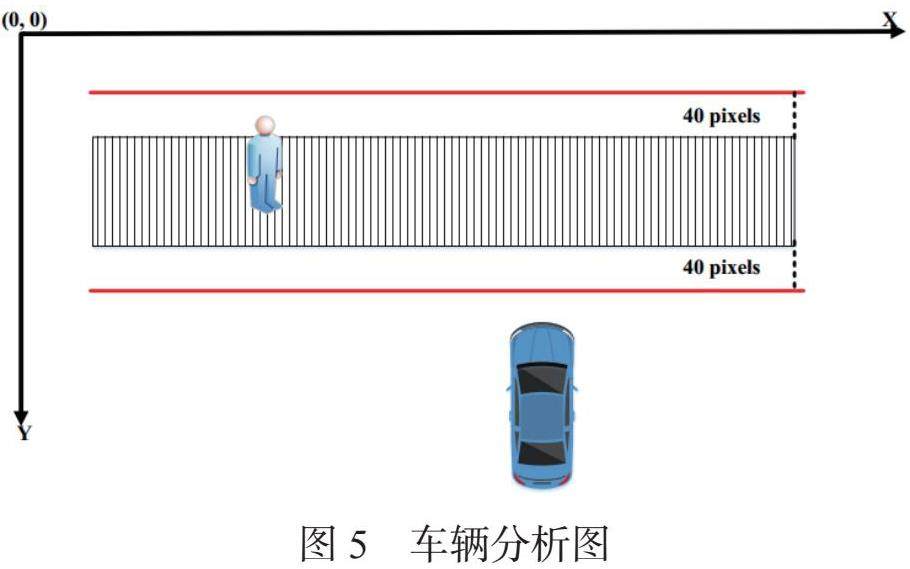
如图4所示,当检测出所有行人后,需要对行人进行过滤,找到只在斑马线上行走的人员。根据行人坐标、斑马线坐标,判断行人所在位置是否为斑马线区域,若为斑马线区域,则保留此人的相关信息,若不在斑马线区域。则将此人从行人列表中剔除。
2.3 车辆分析
行人处理完毕后,再进行车辆信息计算,通过YOLOv3-tiny检测出车辆后,记录其所在坐标,运行方向信息。再进行坐标判断,过滤出斑马线附近的车辆,如图5所示,若车辆运行方向为从上往下,则以斑马线上边坐标基准,40个像素点为阈值设置为检测区域,若车辆运行方向为从下往上,则以斑马线下边坐标为基准,40个像素点为阈值设置为检测区域。若车辆坐标在此区域内,则保留车辆信息,不在此区域内,则将车辆从列表中剔除[6]。
对于所存储的车辆信息,当运行区域在a,b之间时,其为可通行区域,不产生违法,若为其他运行区域,则将有违法行为发生。判断的原理是:当车辆外接矩形左侧x1轴坐标大于b值或右侧x2轴坐标小于a值时,有违法行为,保留此车辆的信息[7]。否则,无违法行为,将此车辆从列表中删除。最后,列表中所存在的车辆即为违法车辆。
3.实验
本研究中使用的增强型yolov3-tiny模型,在NVIDIA RTX 2080上对模型进行了训练和测试。网络初始化参数如表1所示。
本文利用训练后的YOLOv3-tiny模型对测试图像进行了一系列实验,验证算法的性能,衡量算法性能的损失函数如式(1)所示:
其中,为坐标误差,为IOU误差,为分类误差。
为了验证本文提出的模型的性能,以VOC2012、VOC2007训练集训练网络,VOC2007测试集对网络进行测试,其中训练集中共包含人、车图片7800张,通过调整饱和度、亮度、色调来生成更多训练样本。测试图片2000张。将增强型YOLOv3-tiny模型与原始YOLOv3-tiny模型进行对比,以测试模型效果[8]。
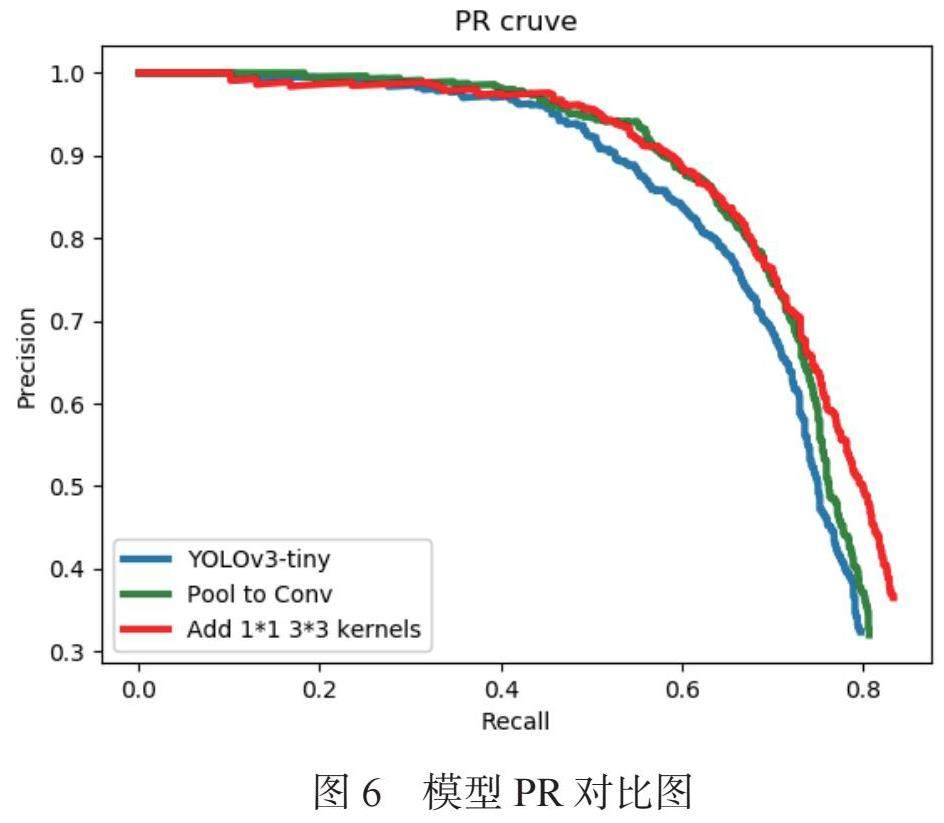
在测试过程中,三种模型的P-R曲线如图6所示[9]。基于以上结果,可以看出本文提出的残差块在训练过程中比其他模型具有更快的收敛速度。三者的最终损失相近,约为0.943。在检测性能方面,通过将池化层改为卷积层、增加了1*1,3*3卷积核之后的增强型yolo-v3模型优于原有的tiny模型。
4.结语
本研究通过对未礼让行人车辆进行检测,引入了用于人车检测的神经网络模型,并在原有YOLOv3-tiny模型的基础上,通过改变特征提取,特征传播,提高了网络的性能。与原有的YOLOv3-tiny相比,改进的模型具有更好的性能,通过此模型进行违法行为检测,既提高了检测精度,又保证了实时性。
在以后的工作中,可以引入交通信号灯检测,车牌识别等功能,以便更好的辅助非现场执法,完善实际场景检测的需要。此外,还可以引入更深的网络结构,采用更多的训练数据进行模型优化,以进一步提高检测精度。
参考文献
[1] 王慧赢. 基于深度学习的车辆未礼让行人的违规行为判定方法研究[D]. 河北科技大学,2021.
[2].周为钢, 冯阳, 徐舒畅. 基于视频分析的机动车斑马线前未礼让违法行为检测系统[J]. 中国人民公安大学学报(自然科学版), 2012, 18(02):57-60.
[3] 皖彦淇. 基于计算机视觉的机动车礼让行人检测算法研究和系统开发[D].吉林大学,2022.
[4] 康庄. 基于改进YOLO v3的交通枢纽行人检测与跟踪技术研究[D]. 江西理工大学, 2021.
[5] 赖见辉, 王扬, 罗甜甜等. 基于YOLO V3的侧视视频交通流量统计方法与验证[J]. 公路交通科技, 2021, 38(01):135-142.
[6] 江金洪, 鲍胜利, 史文旭等. 基于YOLO v3算法改进的交通标志识别算法[J]. 计算机应用, 2020, 40(08):2472-2478.
[7]吴昱芸. 基于YOLO与特征法融合的视觉定位算法研究[D]. 海南大学, 2022.
[8]张为, 魏晶晶. 嵌入DenseNet结构和空洞卷积模块的改进YOLO v3火灾检测算法[J]. 天津大学学报(自然科学与工程技术版),2020,53(09):976-983.
[9] 赵琼,李宝清,李唐薇.基于改进YOLO v3的目标检测算法[J].激光与光电子学进展,2020,57(12):313-321.
作者简介:
王彦明(1995-)男,硕士,石家庄邮电职业技术学院教师,研究方向:人工智能及其应用。
通讯作者:张明新(1995-),男,硕士,石家庄邮电职业技术学院教师,研究方向:智能优化算法及其应用。

 京公网安备 11011302003690号
京公网安备 11011302003690号


