



- 收藏
- 加入书签

基于激光扫描的露天矿山边坡监测与稳定性分析
 打开文本图片集
打开文本图片集
摘要:矿山边坡易发生滑坡等地质灾害,对其进行监测和测量可对即将发生的自然灾害做出预警,提高矿山边坡稳定性。
关键词:激光扫描;露天矿山
闫魏力等采用三维激光扫描技术,对某矿山进行测量,结果表明,该方法的准确性较高,可应用于实际工程中。
姚加宁等采用免棱镜全站仪对矿山的地形进行测量,结果表明,该方法在保证了测量精度的同时,操作简单,还能保证测量的效率。李洁基于无人机低空遥感技术,对某矿山进行监测,分析其在矿山监测中的可行性。
刘旻采用低空摄影测量技术,对矿山坐标进行测量,结果表明,该测量技术的最大误差为1.14 m,可应用于实际测量工程中。王智君等基于三维激光扫描技术,对矿山边坡进行监测,对该技术的实际操作提出了相关建议。
以某矿山边坡为研究对象,采用激光扫描技术,对其坐标进行监测,并根据监测结果分析其稳定性,采用多站点平差法对其监测结果进行优化,并将其结果与近景摄影测量技术得出的检测结果对比,以验证激光扫描技术结果的准确性。
1 工程概况
该边坡平面形态曲折,总体呈北东–南西向展布,总长230.5 m。填方边坡坡体为后期填土、粉质粘土、凝灰岩残积粘性土、全风化凝灰岩,为土质边坡,回填土自稳性差,挖方段边坡坡体以坡积成因粉质粘土及凝灰岩残积粘性土为主,边坡自稳性一般。
本工程场地地下水主要为基岩风化带孔隙、裂隙水,主要赋存于中下部基岩风化带中,其导水性和富水性受风化裂隙、构造裂隙及裂隙充填情况控制,局部地段张性裂隙发育,总体渗透性弱~中等,富水性弱。
2 数据采集
本研究采用激光扫描仪对矿山边坡的空间位置及形态分布进行研究,数据采集从点云数据采集开始。首先,对该矿山边坡的现场情况进行勘测,然后根据现场勘测的情况,确定控制点的布置位置,根据控制点建立控制网,最后对矿山边坡进行场景扫描。
点云数据采集后,对其采集的数据进行处理,采用Riscan Pro软件对采集的数据进行处理,基于最小二乘法计算,以减小激光扫描矿山边坡的误差。然后采用偏差过滤工具,对矿山边坡激光扫描模型进行去噪和简化处理,使模型更加清晰直观。分6期对矿山边坡进行监测叠加,得出矿边坡地表位移情况。
3 变形监测与分析
将矿山边坡分为13个区域,分6期对矿山边坡进行监测叠加,分别分析采用激光扫描仪的准确性,得出每期误差范围内点云数。
激光扫描仪得出的矿山边坡误差范围内点云数主要集中于–0.250 0~0.250 0 m,其中,第2期的误差范围内点云数最大,其值为198 724个,此精度范围内的误差仅为0.5 m,说明采用激光扫描仪对矿山边坡进行监测的准确性较高。
当误差范围为负值时,误差范围内点云数较少,随着误差范围的增大,误差范围内点云数逐渐增大,其中,当误差范围为–1.833 3~–1.041 7 m时,第5期、第6期误差范围内点云数最大,其值均为155个,说明随着矿山边坡的监测叠加过程的进行,误差范围内点云数逐渐增大,检测叠加过程能明显提高矿山边坡监测的准确性。
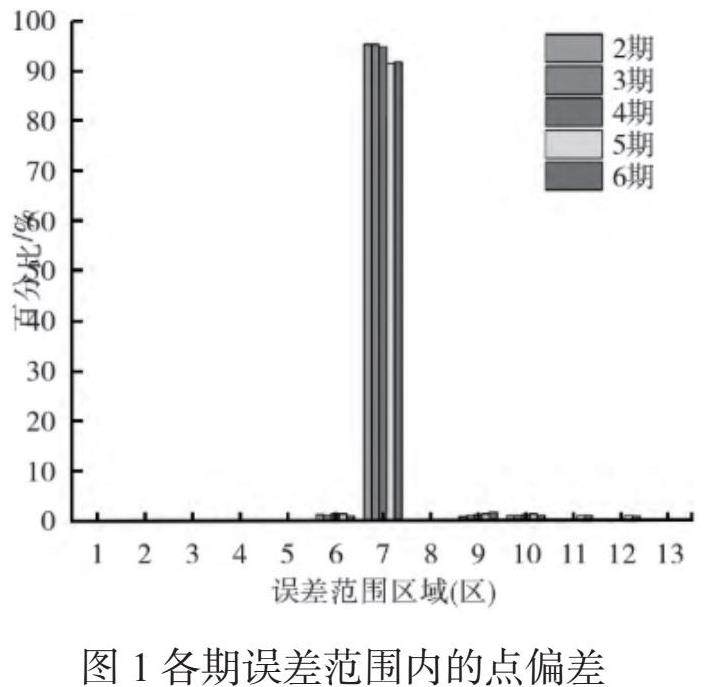
当误差范围为正值时,误差范围内点云数与叠加的期数无明显的相关关系,其变化趋势较不显著。为分析不同误差区域误差范围内点云数的分布情况,分析13个区域内的误差范围内点云数占比情况,各期误差范围内的点偏差如图1所示。
由图1可知,各区域的误差范围内点云数主要集中于第七区,其中,每期误差范围内点云数占比均在90%以上,说明该区域的测量精度较高,其中,第七区二期的占比最高,其值为95.25%,其次为第八区,其占比均值为2.5%。第一区~第五区的误差范围内点云数占比较小,说明该区域采用激光扫描仪的监测效果较差。
由图1可知,不同误差区域误差范围内点云数总体呈正态分布,说明该矿山边坡的较为稳定,发生滑坡的概率较小。为进一步提高激光扫描仪对矿山边坡监测的准确性,采用多站点平差对监测得出数据进行调整,提高其监测精度。选取6个检测点,对其坐标进行调整。
平差前后的坐标与原坐标具有一定的差异性,但是其误差均小于0.01 m,说明平差调整后仅对监测结果进行了微调。
平差后的均方根误差较小,其最大均方根误差为位移偏差,其值为0.019 77 m,说明该数据调整方案的效果良好,经过调整后的监测结果精度较高。为验证经过多站点平差对监测数据调整准确性,分析调整后每期误差范围内点云数统计表。平差调整后的每期误差范围内点云数与调整前的点云数变化趋势具有一致性,当误差范围为负值时,误差范围内点云数较少,随着误差范围的增大,误差范围内点云数逐渐增大。
对比未调整的误差范围内点云数可得,经调整后的误差范围内点云数有显著的提升效果,说明经过调整后的矿山边坡监测精度有显著的提升效果。
激光扫描仪得出的矿山边坡误差范围内点云数主要集中于–0.250 0~0.250 0 m,其中,第2期的误差范围内点云数最大,其值为509 782个,此精度范围内的误差仅为0.5 m,说明采用激光扫描仪对矿山边坡进行监测的准确性较高。
对比未调整的监测数据可得,调整后的点云数约为调整前的3倍,说明采用平差调整能显著提高误差范围内点云数,有利于激光扫描仪监测的准确性。
4 结束语
以某矿山边坡为研究对象,采用激光扫描技术,对其坐标进行监测,并根据监测结果分析其稳定性,采用多站点平差法对其监测结果进行优化,得出以下结论。
(1)激光扫描仪得出的矿山边坡误差范围内点云数主要集中于–0.250 0~0.250 0 m。其中,第2期的误差范围内点云数最大,其值为198 724个,此精度范围内的误差仅为0.5 m,采用激光扫描仪对矿山边坡进行监测的准确性较高。
(2)不同误差区域误差范围内点云数总体呈正态分布,说明该矿山边坡的较为稳定,发生滑坡的概率较小。
(3)平差后的均方根误差较小,其最大均方根误差为位移偏差,其值为0.019 77 m,说明该数据调整方案的效果良好,经过调整后的监测结果精度较高。
参考文献
[1] 闫魏力,张驰,王洛锋.无人机载三维激光扫描技术在露天矿山测量中的应用[J].黄金,2022,43(8):41–44.
[2] 姚加宁,陈佳春.浅谈免棱镜全站仪在矿山地形测量中的应用[J].西部探矿工程,2022,34(7):137–139.
[3] 李洁,侯威震.无人机低空遥感在矿山测量中的应用[J].现代盐化工,2022,49(3):92–93.
[4] 刘旻.低空摄影测量技术在矿山测量中的应用[J].内蒙古煤炭经济,2022(9):175–177.
[5] 王智君,张杰.三维激光扫描技术在矿山测量中的应用与研究[J].中国金属通报,2022(2):28–30.

 京公网安备 11011302003690号
京公网安备 11011302003690号


