



- 收藏
- 加入书签

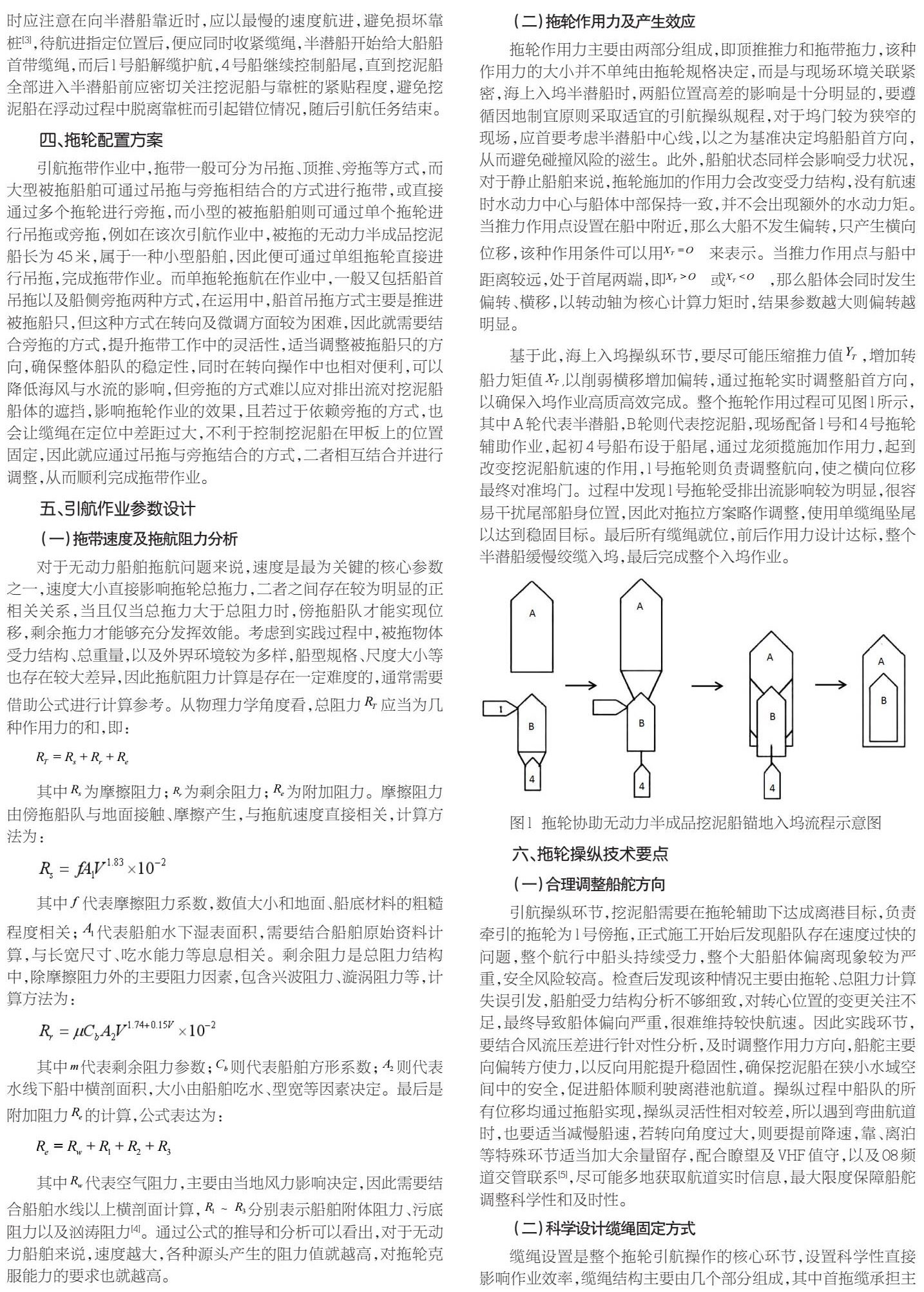
拖轮协助无动力半成品挖泥船锚地入坞半潜船操纵研究
 打开文本图片集
打开文本图片集
【摘要】在我国科技与经济的发展下,海洋资源不断被开发,各项海洋大型机电设备都成为了重要的国防建设,而在此背景下,半潜船则拥有着极为宽广的市场需求,在海洋作业中发挥着不可替代的意义。基于此本文从半潜船的结构及功能出发,探讨了半潜船引航作业的相关流程,并对引航作业中的相关参数设定及各项技术要点加以论述,希望为有关部门提供参考,促进我国海洋作业的发展。
【关键词】半潜船;海洋作业;海上入坞;拖带引航作业;引航参数
在当前航运事业的发展下,很多船港都在接待着很多无动力船舶、半成品挖泥船等船只的修理与拆解工作,需要半潜船进行拖轮引航入坞,但当前很多船港工作人员都并未熟练掌握半潜船引航的技术要点,难以保证引航员可以安全高效地完成引航任务,而秦皇岛港需要应对大量的半潜船拖带引航作业,因此可以此为例,具体研究引航操作方式及参数设计,提高工作人员对于操作技术的学习,确保引航作业的顺利进行。
一、半潜船结构及功能
半潜船也可称为半潜式母船,可通过对自身压载水的调整,让承运驳船、游艇等货物的甲板潜入水下,而货物则可依靠浮力进行漂浮,再将货物运送到指定位置。而这种特殊的船舶设计也与一般的船只存在着较大的区别,通常拥有较深的吃水性能,但又不像普通的潜艇一样完全沉入水下,而是有一部分船体在水下,另一部分船体在水面以上。同时在水面以上的船体部分中可安装动力推进系统,让其具备航行的能力,以此来带动另一部分沉入水下的部分进行航行,而卸货过程则相反。
半潜船可以满足不同种类货物的装卸运输工作,例如石油钻井平台、潜艇、龙门吊等大型构件的运输工作,而为了运输不同种类的货物,半潜船在种类及形式上也拥有各项变化,早期使用的半潜船只能通过左右平移装卸货物,而现有的半潜船则可在船首装卸货物,装卸过程较为方便,且在甲板货物固定中也拥有不同的拖带牵引方式,另外还具备独特的控制系统,其主操纵台位于驾驶台中间,还拥有多个副操纵台,还搭配动态定位系统,接收海风、海浪、水流等环境信息,可通过操纵杆操作侧推器、螺旋桨[1]等实现原地旋转与漂移,降低环境对于航行的影响。还具备自我航行的能力,不需要依靠其他拖船完成运输工作,且现有的半潜船油舱容量更大,拥有更长的续航时间,还具备较高的抗风浪能力,因此在当前的海洋作业中,半潜船得到了较为广泛的运用,其作用难以替代。
二、引航作业环境及条件概述
半潜船在引航作业中,需要对周边作业环境进行考虑。以秦皇岛港为例,该港平日需要通过半潜船进行多种无动力船只的引航,秦皇岛港周边一般是以日潮为主的不规则混合潮型,最高潮位可达到2.55米,最低潮位为-1.43米,平均潮差0.8米,涨潮流向为西南方向,强风以东北风为主,而由于无动力被拖船只船型尺度与吃水能力较小,且出港航道相对较为狭窄,又拥有较长的拖航距离,因此可在气象环境较好时,通过两条拖轮共同协助半成品挖泥船的引航入坞作业。
该次引航作业目的是将无动力半成品挖泥船从港开河码头进行脱离,到秦皇岛西锚地入坞。在作业中应确保引航起拖时气象及水文条件可满足拖航的需求,作业应选在白天或平潮时间段进行,而装船作业也应在白天进行,且风力应≤15千米,浪高<0.6米,海况流速应<1千米。采用了船长140.55米的半潜船,船宽约为25米,共计12.8吨,载重7700吨,吃水可达到6.4米,而需要引航的无动力半成品挖泥船船长45米,船宽约为15米,共计950吨,干舷高为2.2米。
该引航入坞作业需要通过1号港与4号港的两条拖轮进行协同作业,其中1号港总长为35米,宽10米,拖航吃水为4.5米,总功率为2574千w,共379吨,而4号港总长度为32米,宽9米,拖航吃水为2.8米,总功率为1470千w,共计270吨。
三、引航操纵方法及经过
在半潜船进行引航作业前,首先应做好充分的引航准备工作,半潜船一般应提前三天抵达,召开装卸工作会议,并应组织相关负责人进行安全引航研究及装卸方案制定。例如秦皇岛港本次引航作业运用的半潜船没有坞墙,驾驶台设置在船首区域,如果船舶是空载状态,引航员可以直接通过直升机进行接送,而如果船舶已经装载了挖泥船,引航员上船时就需要通过船尾登船,可爬过主甲板的货物到达驾驶台,有一定的安全风险;或通过船尾的门洞进入机舱通道,但时间较长,为此引航员应预留出充分的时间,确保工作安全。
工作人员登船后,船长应向船员做好交底工作,向船员讲解设备性能、操作特点等事项,以及风力、浪潮等方面的影响,及时针对周边环境采取相应措施,例如该半潜船所采用的是无级变速推进器,与传统的车钟令并不匹配,因此引航员应做好沟通协商,及时调整转速,且半潜船并没有舵叶,需要依靠交流确定旋桨的方向设定。另外半潜船由于需要装运货物,该无动力半成品挖泥船的重量较高,因此船体装卸在不同的甲板区域,均会对半潜船的操作带来影响,例如侧向来风时,货物偏向后装载,半潜船整体就会呈现右转的趋势[2],而货物偏向前部装载时,半潜船整体又会呈现出左转趋势,为此很容易导致船体引航中偏离航线,在控制上较为困难,应做好充分的前期规划,需要引航员在引航过程中利用半潜船较高的操作性能,及时考虑到操纵过程中的特殊性及各项不利因素,确保船体始终处于安全状态下,并应避免急速转向,相互之间应做好沟通协商,及时了解操作意图,确保半潜船安全到达指定位置。
半潜船在进行装卸作业中,一般会通过船尾靠泊的方式,而半潜船的船尾纵切面近似于平面,因此可与码头靠拢较为紧密,同时还可通过双锚停泊的方式,进一步降低风力与浪潮的影响,确保与码头保持垂直状态,待尾缆上桩后再慢慢收紧,控制入泊的角度与速度,该过程中驾驶员应及时与岸边工作人员保持联系,及时明确船体情况及拖轮及送锚链情况等。
而在秦皇岛港的引航作业中,通过前期环境调查,当日视线为6海里以上,风力1级,满足引航条件,引航员与拖轮抵达后便开始检查引航、导航、通讯装置的工作状况,作业中4号港船船头带缆开船头,而1号港船拖船尾,离泊后4号船解拖伴航,1好穿继续拖挖泥船沿着河道出港,向指定位置航进,行进过程中4号船在大川船尾控制须缆方向,而1号船负责牵引,将大船送至半潜船坞口,此时应注意在向半潜船靠近时,应以最慢的速度航进,避免损坏靠桩[3],待航进指定位置后,便应同时收紧缆绳,半潜船开始给大船船首带缆绳,而后1号船解缆护航,4号船继续控制船尾,直到挖泥船全部进入半潜船前应密切关注挖泥船与靠桩的紧贴程度,避免挖泥船在浮动过程中脱离靠桩而引起错位情况,随后引航任务结束。
四、拖轮配置方案
引航拖带作业中,拖带一般可分为吊拖、顶推、旁拖等方式,而大型被拖船舶可通过吊拖与旁拖相结合的方式进行拖带,或直接通过多个拖轮进行旁拖,而小型的被拖船舶则可通过单个拖轮进行吊拖或旁拖,例如在该次引航作业中,被拖的无动力半成品挖泥船长为45米,属于一种小型船舶,因此便可通过单组拖轮直接进行吊拖,完成拖带作业。而单拖轮拖航在作业中,一般又包括船首吊拖以及船侧旁拖两种方式,在运用中,船首吊拖方式主要是推进被拖船只,但这种方式在转向及微调方面较为困难,因此就需要结合旁拖的方式,提升拖带工作中的灵活性,适当调整被拖船只的方向,确保整体船队的稳定性,同时在转向操作中也相对便利,可以降低海风与水流的影响,但旁拖的方式难以应对排出流对挖泥船船体的遮挡,影响拖轮作业的效果,且若过于依赖旁拖的方式,也会让缆绳在定位中差距过大,不利于控制挖泥船在甲板上的位置固定,因此就应通过吊拖与旁拖结合的方式,二者相互结合并进行调整,从而顺利完成拖带作业。
五、引航作业参数设计
(一)拖带速度及拖航阻力分析
六、拖轮操纵技术要点
(一)合理调整船舵方向
引航操纵环节,挖泥船需要在拖轮辅助下达成离港目标,负责牵引的拖轮为1号傍拖,正式施工开始后发现船队存在速度过快的问题,整个航行中船头持续受力,整个大船船体偏离现象较为严重,安全风险较高。检查后发现该种情况主要由拖轮、总阻力计算失误引发,船舶受力结构分析不够细致,对转心位置的变更关注不足,最终导致船体偏向严重,很难维持较快航速。因此实践环节,要结合风流压差进行针对性分析,及时调整作用力方向,船舵主要向偏转方使力,以反向用舵提升稳固性,确保挖泥船在狭小水域空间中的安全,促进船体顺利驶离港池航道。操纵过程中船队的所有位移均通过拖船实现,操纵灵活性相对较差,所以遇到弯曲航道时,也要适当减慢船速,若转向角度过大,则要提前降速,靠、离泊等特殊环节适当加大余量留存,配合瞭望及VHF值守,以及08频道交管联系[5],尽可能多地获取航道实时信息,最大限度保障船舵调整科学性和及时性。
(二)科学设计缆绳固定方式
缆绳设置是整个拖轮引航操作的核心环节,设置科学性直接影响作业效率,缆绳结构主要由几个部分组成,其中首拖缆承担主要牵引职能,要结合要求设置导缆孔,港外作业时要适当放长,合理控制水平俯角参数,通常在15°~20°之间。傍拖船首缆则发挥制动、调向功能,注意提前设置导缆孔。本次作业中1号拖轮尾缆为主拖缆,由于高差较大, 转向环节很容易出现拉长、松弛等情况,削弱拖轮的牵引控制能力,尾缆分别布设于尾舷两侧,拖带效果有所保障。1号拖轮航行至指定位置后,在船尾部分配置4号拖轮,以龙须缆为介质进行锚固,以达到控制方向、防止大船偏离的目的。但缆绳绑扎完毕后,现场检查却发现缆绳长度不足,整个操纵灵活性受限,且船尾部分实时观测数据显示,排出流也已经超过设计值,使得4号拖轮调控作用力下降。基于此,实践中可以适当转变缆绳固定思维,用单根拖缆代替龙须缆,同时设置绞缆装置,或者坠尾装置减小相互作用力,确保引航操作顺利完成。
(三)提前做好船体碰撞防护
无动力船舶拖带环节,碰撞是较为常见的技术难题,离港操作时尤其容易出现,本次引航任务中,由于1号拖轮高程较小,与被拖大船之间高差幅度过大,因此缆绳松紧度很难控制,过程中出现了磕碰损伤,虽然整体影响极为轻微,但仍旧说明了方案设计有较大的改进空间,应当树立起风险意识,提前进行磕碰防护。挖泥船靠近坞口时,整个船只进入顺流状态,风流等因素综合作用,加大了船位控制难度,坞门宽度也进一步限制了作业顺畅性,船只进入时很容易左右漂移,由于坞门过窄很难调整,致使船只多次出现碰撞危险。方案改进环节,对船头两侧进行了额外的加固处理,使用缆绳进行固定,同时减小1号拖轮推力,作用力尽量靠前且远离转心,以达到压缩漂移量和碰撞几率的作用,实践中可以加以借鉴。考虑到船体拖带对各专业、各部分的配合度要求较高,操纵时还应当协调好职责归属,充分听取船长、引航员建议,必要时借助雷达、电子海图等推进碰撞防护,结合流向、流速参数,科学计算风流压角参数[6],使得船舶航行路线维持在预定线路上,确保引航操纵安全性。
七、结论
综上所述,拖轮协助无动力半成品挖泥船锚地入坞作业具有一定的复杂性、危险性,参数控制不当不仅会导致入坞效率降低,还可能出现各种碰撞、偏荡、绞缠问题,影响作业安全性和稳定性。实践过程中,务必要正视科学操作重要性,结合引航任务内容、现场气象海况等制定可行的引航方案,借助专用公式计算拖航阻力、拖带速度、拖轮力矩等数值,通过科学搭配减少潜在安全风险,同时把握好几个操纵技术要点,离泊环节适时调整船舵方向,傍拖过程中做好缆绳设计和配置,同时做好碰撞防护,尽可能减少船只漂移量,为船舶入坞操作的完成奠定坚实基础。
【参考文献】
[1]蔡元浪,杨亮,杨小龙.“深海一号”半潜式生产储油平台大敞口船体滑移横向装船技术[J].船海工程,2022,51(03):80-84.
[2]谢永春,李永川,宋广兴.半潜船体舾装施工要点[J].石油和化工设备,2022,25(02):112-114.
[3]孙强,邬远和,马波.厦门港半潜船“鹰隼”轮装载作业区选定条件分析[J].航海技术,2022(01):26-29.
[4]秦成,怀利敏,史淑玲.某半潜船的水动力性能仿真分析[J].广东造船,2021,40(06):20-23.
[5]刘旭,辜康立,姚汉文.5万t半潜船尾靠装载油气模块要点[J].船舶设计通讯,2021(S1):34-37.
[6]王衍鑫,于文太,梁学先.超大型半潜平台船体船载运输方法探讨[J].石油和化工设备,2021,24(06):16-20.

 京公网安备 11011302003690号
京公网安备 11011302003690号


