



- 收藏
- 加入书签

基于多维状态感知的变电站智能机器人巡检系统关键技术研发与应用
 打开文本图片集
打开文本图片集
摘要:电力巡检机器人是集合了智能巡检技术、机器人本体技术、电力设备非接触检测技术、多传感器融合技术、导航定位技术、模式识别技术及物联网技术等高新技术的有机结合体。变电站内设备众多,随着设备检修、改造工作的增多,巡检机器人巡检环境、巡检设备、巡检参数也愈加复杂,通过对巡检机器人的机器人分系统、任务荷载分系统和综合保障分系统的研究,可以有效提高巡检的效率,减少设备的事故发生率,增强了巡检的准确性和实时性。
关键词:变电站自动化;智慧电网;电力巡检机器人
1 引言
2015年国家发改委、能源局发布《关于促进智能电网发展的指导意见》,短短几年时间,智能电网在我国发展神速。其中,智能巡检作为智能电网建设的关键一环,也迎来了高速发展的契机。电力巡检作为机器人新的用武之地将扮演越来越重要的角色。目前,随着国家电网“大检修”体系的深入推进,变电站已基本实现无人值守,变电站作为连接主干网和配电网的关键节点,如何保证它的正常运行直接关系整个电力系统的稳定安全。为了保证对变电站内主变、母线、开关等主要一次设备运行状态的实时监控,需要对变电站进行检查和维护。目前传统巡检方式存在很多问题,一是巡检工作量大,二是缺少提前预测,三是缺乏统一调度,四是工作安全隐患大。因此,伴随自动化技术及智能机器人在各行各业的快速发展,由智能机器人替代现场运维人员进行设备巡检的模式将成为变电站发展的必然趋势。通过巡检机器人的智能感知,利用故障诊断技术判断设备状态,实时展示并在出现异常时准确显示出预警(故障)位置和类型,实现变电站设备全域感知,故障精准判断、定位准确清晰、预警及时有效的功能,为室内变电站挂轨机器人智能巡检系统的研究提供有效的设计框架,也为智慧电网的发展奠定理论和应用基础。
2 国内外研究现状和发展趋势
(一)国外研究现状
上世纪90年代,日本四国电力公司与日本东芝有限公司联合设计研发了世界上第一款应用于变电站的巡检机器人BIG Mouse,机器人采用地面双轨道式移动平台,实现了可见光摄像机和红外热像仪的检测系统研究;2003年,日本首次提出了变电站巡检机器人研究方案,并进行了实验室模拟实验,由于技术问题,机器人并未规模化推广;2005年A.Birk等人设计了基于轨道的变电站机器并投入使用;
在设备运行状态监控方面,Park等基于视觉图像技术的绝缘检测方式,使检测系统性能全面、精准[1]。
在设备状态识别功能方面,Z Liu提出了一种通过对图像进行灰度、降噪和分段线性灰度变换的指针式仪表的准确识别和读数方法[2]。
在开关状态识别方面,Schimid等基于Harris角点提出了 Harris-Laplace 算子,系统识别效果好,稳定性强,该系统基于目标的局部特征,实现了从包含庞大数量数据的图片库寻找特定目标物体,是物体识别发展过程的一座里程碑[3]。
以上学者的研究主要集中在对巡检机器人的定位机构、路径规划、状态监测的设计,其着眼点在于通过适当的方法,对巡检机器人的结构、控制、监测原理方法进行优化,以期达到智能化、自动化的巡检效果,这也是室内巡检机器人在智能电网中的重要研究方面。
(二)国内研究现状
1999年,国家电网山东省电力科学研究院开展变电站巡检机器人的研究,2003年中科院自动化研究所、山东科技大学提出三掌两臂巡检样机,2006年西南科大研制出履带机器人,可爬行20cm高度,2012年中科院沈阳自动化研究所研制出轨道式巡检机器人,2016年鲁能研制出第6代可实现3D激光导航、紫外摄像自动避障的巡检机器人,2019年亿嘉和研制出可带电作业机器人,2021年中天科技研制出开关室操作机器人,实现从巡检到操作的跨越。
在机器人定位导航方面的研究只要集中在视觉导航、GPS导航,激光雷达导航、惯性导航、即时定位与地图构建等方法。肖鹏等将激光雷达传感器与地面标志融合的导航方法,并对比分析了实际路径与设置路径之间的差异[4]。张斌等采用GPS进行导航的方法,并分析了变电站环境对GPS的干扰效应[5]。王凯通过红外图像进行模版识别与模式匹配,实现对准确定位和识别目标区域[6]。林兴提出一种基于EKF的多传感器融合定位系统,并通过对电机转速的控制实现精确控制机器人的移动精度[7]。
在设备运行状态监测方面,鲁守银等对变电站机器人的结构进行了设计,并研究了MIC、红外技术、可见光摄像技术在巡检系统中的优化应用[8]。
在设备仪表状态识别方面,颜友福利用指针提取算法和Hit-Miss直线算法提出一种指针实时识别算法,识别精度较高[9]。
对于开关位置状态的识别,周立辉等人提出一种基于隔离开关红外影像图的状态辨识法,通过对隔离开关区域辨识、图像分析特征提取、实时图像匹配实现对开关位置的识别[10]。
本课题针对室内变电站智能机器人巡检系统,研究机器人控制策略,动态感知变电站运行数据,通过大数据技术实现对变电站设备健康状态的精确预测,重点突破变电站挂轨机器人智能巡检系统的高精度定位、图像配准融合、局放检测定位、精准评估等关键技术,研制出变电站挂轨巡检机器人的联动、感知、管控、预测系统。因此,若本研究获得成功并投入实用生产,必将产生良好的经济效益和社会效益。伴随着智能电网建设的步伐加快,未来变电站智能巡检机器人市场前景广阔,蕴含着巨大的商机。
3 主要研发内容和关键技术
(一)主要研究开发内容
本研究针对基于多维状态感知的变电站智能机器人巡检系统着重开展智能机器人挂轨行驶驱动技术、红外热像仪技术应用、多维状态感知技术应用等三个方面的问题开展研究。
⒈巡检机器人的挂轨行驶驱动技术研究
基于激光扫描(脉冲)和RFID定位辅助纠错法结合 理论或技术或方法,开发巡检机器人行驶驱动系统,解决执行机构、精准定位问题。
⒉巡检机器人的可见光及红外图像识别
基于双目视觉图像的电力设备状态识别算法,开发巡检机器人对开关设备检测及状态识别系统,解决的可见光及红外图像识别问题。
⒊巡检机器人的多维动态感知系统
基于种高精度传感器替代人工完成对电力设备中的局放监测、红外温度测量、仪器仪表识别、环境温湿度测量等检测任务方法,开发检机器人的多维动态感知系统,解决客户对配电室要求无人值守问题。
㈡关键技术
⒈挂轨机器人行驶驱动技术
利用机器人运行轨道进行滑触式供电,实现24小时连续不间断运行。根据运动目标距离和定位标签,控制伺服电机的驱动脉冲总量和频率,实现挂轨机器人行驶位移、速度和定位控制。
⒉可见光及红外图像识别技术
通过红外热成像对开关柜的本体温度识别,经红外观察窗对柜体内部特定区域温度进行识别。
可见光图像识别,针对仪表类对象,解决数值的识别问题。首先对 RGB 图像进行灰度处理,转换为 HIS 图像,并根据表盘空间区域范围,确定指针式仪表的指针空间位置,解决指针式仪表的精准读数,最终实现可见光图像识别。
红外热成像图像识别,针对非仪表的对象,解决温度的识别问题。首先对红外图像进行二值化处理,选取图像的参考区域设置模版,最后根据模版中心与红外图像中心的坐标差调整云台角度,找到目标的中心,确定目标位置的定位,实现温度的识别。
⒊多维状态感知智能机器人巡检系统
通过智能机器人的局放、温湿度、气体等多传感器融合技术,从视觉到多频谱立体化感知、设备到环境全方位监测的多维巡检感知体系,全面实现感知变电站运行状态。
㈢主要创新点
⒈智能巡检机器人的高精度定位。采用绝对位置定位法,实现行走机构定位精度≤5mm,避免重复定位精度下降问题。
⒉运用可见光与红外热成像图像识别技术,对指针类及非指针类设备图像采集和预处理,实现多维状态感知的变电站运行状态的数据采集。
⒊采用地电波和超声波传感器,采集设备运行过程中的信号波长和频率,通过与同类设备及其该设备的历史数据进行横向、纵向比对算法,识别局放类型及放电量,快速查找出局放的部位。
4 研究方案、技术路线分析
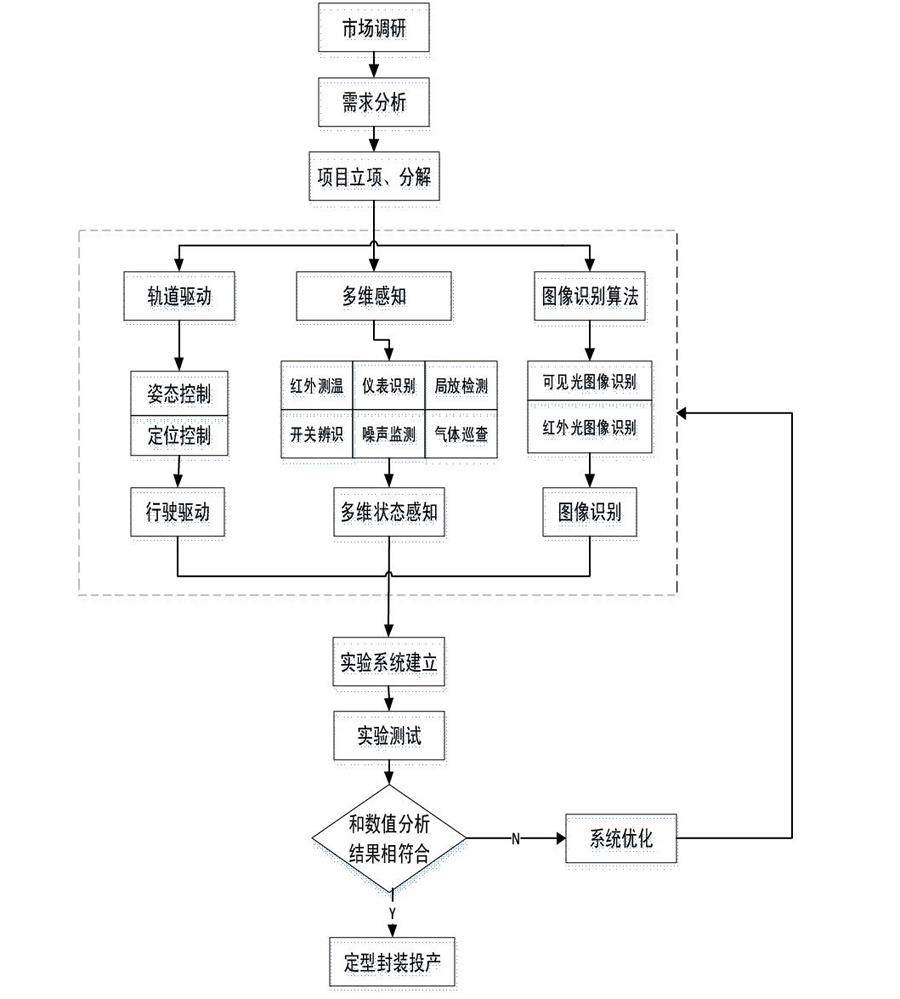
㈠技术路线
在查阅了大量国内外文献的基础上,根据项目组的学术讨论和科研工作积累,拟采用的技术路线如图1所示。
㈠研究方案
⒈挂轨机器人驱动控制策略
智能机器人底盘采用挂轨结构,其主要由电机、驱动轮、导向轮、弹簧装置以及定位标签读取装置组成。驱动轮安装在导轨下方紧贴导轨,电机拖动驱动轮行驶,驱动轮上装有计算行程的码盘用以记录机器人的行驶距离。定位标签读取装置可快速识别轨道上的定位标签信息,及时修正机器人当前的位置信息。导向轮分别安装在轨道上、下两侧,上方的导向轮压在导轨上以支撑整个机器人。轨道上方的导向轮旁并排安装了一个弹簧装置,利用轨道外侧弹簧与内侧弹簧的水平压缩力调整驱动轮方向实现弯道转弯,保障机器人在弯道上平滑行驶。挂轨机器人通过控制电机转速实现挂轨机器人行驶控制策略,可减小运动惯性引起的定位误差。
挂轨机器人的驱动控制策略:挂轨机器人启动时首先根据巡检路线判断目标距离并控制行驶速度,距离巡检目标有超过2个定位标签时挂轨机器人快速行驶达到正常行驶速度,在经过与巡检目标最近的第2个定位标签时,挂轨机器人自动将行驶速度控制为正常速度的50%,在经过与巡检目标最近的一个定位标签时,挂轨机器人自动将行驶速度控制为正常速度的20%,到达巡检目标时即发停止制动命令。
智能巡检机器人搭载了各种传感设备:超超声波+TEV局放传感器、温湿度传感器、红外热成像、气体检测、监控球机等多种前端。预先设置多个监测点,从多个角度对全站设备进行整体性扫描式温度局放采集。
⒉智能机器人可见光及红外图像识别
机器人图像识别模块目的是采集变电站设备的温度、数值、状态等数据,为最关键技术。本文所论述的图像识别技术控制系统分为两部分:第一部分为基于红外图像的目标自动识别,实现的功能是准确寻找目标;第二部分为目标状态采集,实现了指针表、数字表、油位计、干燥剂、开关分合状态等的数值读取。
首先先采集红外图像,对生成的红外图像二值化,然后选取图像的参考区域设置模版,最后根据模版中心与红外图像中心的坐标差调整云台角度,找到目标的中心。
⒊多维状态感知技术的应用
过其搭载的多种高精度传感器替代人工完成对电力设备中的局放监测、红外温度测量、仪器仪表识别、环境温湿度测量等检测任务,并通过监测平台对巡检数据进行对比和趋势分析,提前发现运行中的事故隐患和故障征兆。建立客户客户高压开关柜现场,通过智能机器人识别设备的温度,指针型仪表、数字式仪表、颜色类仪表、指示灯状态、开关分合状态,可视监控室内其余设备运行状态,监测室内环境温湿度值等。
5 预期目标及前景
开发基于多维状态感知的变电站智能机器人巡检系统,通过其搭载的多种高精度传感器替代人工完成对电力设备中的局放监测、红外温度测量、仪器仪表识别、环境温湿度测量等检测任务,并通过监测平台对巡检数据进行对比和趋势分析,提前发现运行中的事故隐患和故障征兆。实现配电室无人值守,提高巡检质量和巡检效率,及时准确发现事故隐患。
近年来,此类新型巡检机器人在电力、隧道、冶金等领域得到广泛应用,销售市场也在进一步扩大。相关统计显示,2018年至2020年中国巡检机器人市场总需求约为477亿元,年均需求约159亿,预计智能巡检领域未来市场可达千亿元。
随着人工智能逐步与传统产业结合,物联网、云计算、5G技术为企业带来可观的经济效益和社会效益,并推动产业源端的重组升级,中国产业结构的调整让巡检机器人也迎来快速发展。以中国国家电网为例,智能化电网巡检机器人能克服传统人工对变电站、配电站的巡检不到位、巡检结果无法数字化的缺陷,有效节省巡检成本,提升电网系统的智能化运行水平。
参考文献
[1]Joon-Young Park, Jae-Kyung Lee, Byung-Hak Cho. An Inspection Robot for Live-Line Suspension Insulator Strings in345-k V Power Lines. IEEE Transactions on Power Delivery . 2012.
[2]Z Liu,H Huang,N Wang,Y Cao,L Zeng,J Zhang,C ZhangA pointer meter reading recognition method based on improved ORB algorithm for substation inspection robot, Journal of Physics Conference,2022.
[3]Schmid C, Mohr R. Local grayvalue invariants of image retrieval[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1997,19(5):530-535.
[4]肖鹏,孙大庆,王明瑞,等.基于激光定位的变电站智能巡检机器人导航系统设计[J]. 计算机测量与控制, 2012, 20(06): 1629-1635.
[5]张斌.基于差分式高精度 GPS 的变电站移动机器人导航系统[D].山东大学,2008.
[6]王凯.变电站巡检机器人关键技术及系统的研究与实现[D].电子科技学,2015.
[7]林兴.变电站巡检机器人智能导航系统的应用研究[D].华中科技大学,2021.
[8]鲁守银,钱庆林,张斌等.变电站设备巡检机器人的研制[J].电力系统自动化,2006,30(13) :94-98.
[9]颜友福,刘金清,吴庆祥. 基于区域生长的指针式仪表自动识别方法[J].计算机系统应用, 2015, 24(4):164-170.
[10]周立辉,张永生,孙勇.智能变电站巡检机器人研制及应用[J].电力系统自动化, 2011, 35(19):85-8
作者简介:张盛,男,1988.8,汉,浙江江山,本科,电气工程师,研究方向(所学专业):电气工程及其自动化。

 京公网安备 11011302003690号
京公网安备 11011302003690号


