



- 收藏
- 加入书签

无人机地面运动及仿真分析
 打开文本图片集
打开文本图片集
摘要:无人机地面运动时,由于受到地面摩擦力作用和起落架影响,其运动特性和空中飞行时是不同的。地面运动情况是无人机安全起降的一个重要阶段,所以对无人机地面运动过程进行详细分析并建模仿真,对无人机安全起降,减少飞行事故发生,具有重要的意义。本文首先对无人机地面运动进行详细分析介绍,接着以某型无人机为样例进行数学模型分析,最后仿真验证。结果表明,该模型能较为真实地反映无人机地面运动状态,对研究无人机控制具有一定的参考意义。
关键字:地面运动;建模;无人机;仿真
引言
近年来,我国科学技术迅猛发展,随着神舟十三号、神舟十四号的相继发射,彰显了我国航天事业蒸蒸日上,同时无人机应用技术也日趋成熟,不仅在军事领域,民用领域也得到了广泛应用,比如:电力巡检、航拍、灾后救援、快递等。所以,无人机应用的安全性也越来越成为人们关注的热点。虽然,无人机在应用上具有很多优点,给我们的生活带来了便利,但在控制技术和应用研究上还有很多难点,有待我们深入全面地研究,其中一个就是地面运动[1],其控制得好坏,是决定无人机安全起降的关键因素,对减少无人机地面滑跑起飞和着陆过程事故发生具有十分重要的意义。
1无人机地面运动过程分析
以轮式起降无人机为例,其地面运动从启动发动机开始,到主轮刚好完全离开地面结束。启动发动机,在推力作用下,无人机沿着跑道开始加速滑跑,过程分为三轮滑跑和两轮滑跑阶段[1]。
当无人机在较为低速状态下滑跑时,处于三轮滑跑阶段,这时由于速度小,机体受到的气动效应弱,机轮与地面间的摩擦较大,假如不考虑侧滑,这时无人机横侧向上受力与力矩平衡,沿着跑道中心滑跑,无偏航。随着发动机推力不断增大,速度不断提高,气动作用增强,导致地面与机轮的摩擦力减小,在气动力作用下,无人机会产生偏航状态,这时,可以采取前轮控制或者主轮刹车来减弱偏航运动[2]。随着速度不断提高,当达到抬前轮速度时,前轮抬起,这时候无人机进入两轮滑跑阶段,此时速度很大,气动作用很强,摩擦力仅由两个主轮来提供,所以很难提供足够的侧向摩擦力矩来和偏航力矩抵抗,所以,这时候飞机横侧向上受力和力矩是不平衡的,飞机状态很不稳定,只要受到小干扰就有可能导致其发生侧翻,产生飞行事故。
2无人机地面数学模型分析
无人机地面系统主要包括起落架、机轮和刹车[3]。所以地面数学模型主要由这三部分组成,数学模型采用的坐标系有地面坐标系和机体坐标系。起落架模型包括缓冲器模型和轮胎模型,缓冲器模型在不考虑其他次要因素的影响下,可以把它当做弹簧阻尼系统来建立数学模型,轮胎的数学模型主要就是支撑力和摩擦力模型,根据受力分析,支撑力模型为[3]:
前起落架:
主起落架:
式中为地面对前起落架支撑力,为地面对主起落架支撑力,为起落架压缩量,为压缩速度。
轮胎的摩擦力根据前面地面运动状态的分析,主要包括纵向的摩擦力和横侧向的摩擦力数学模型,刹车系统就是指前轮的纠偏和主轮的点刹模型。
3仿真分析
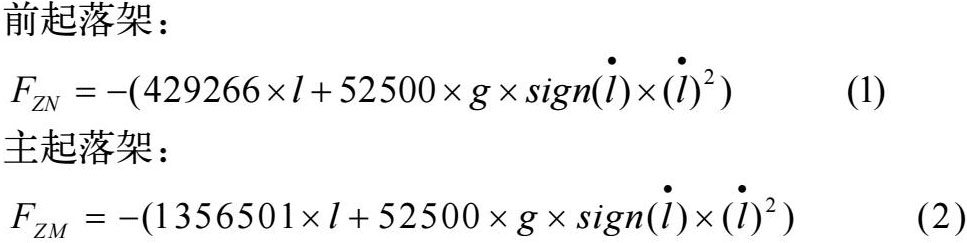
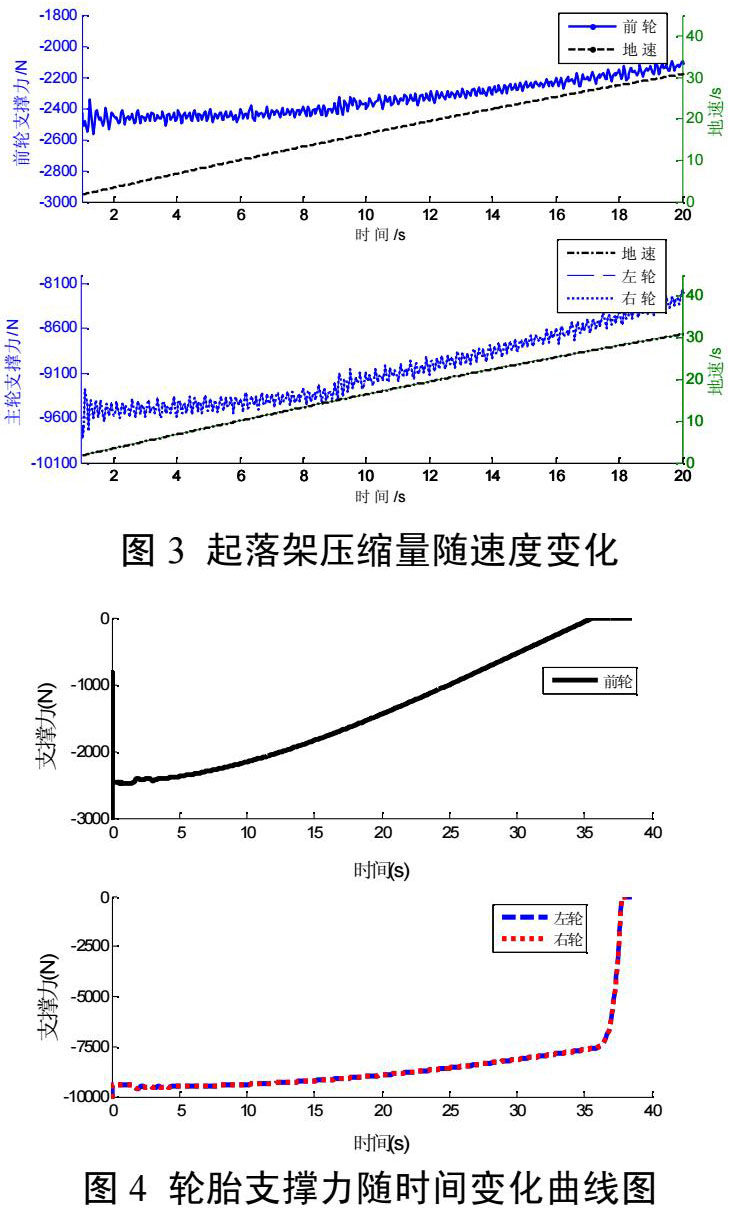
根据地面数学模型分析,根据惯性空间牛顿动力学与运动学理论进行数学建模后,对地面运动状态进行仿真,得到如下仿真图3和图4。
图3表示了无人机起落架随速度变化的情况,从仿真结果可以看出,随着速度的增大,起落架压缩量逐渐减少。图4表示随着时间变化,速度提高,轮胎支撑力逐渐变小,当轮胎离地时,支撑力变为0。以上仿真结果均与实际的运动特性相符,表明模型具有可信度。
4总结
无人机地面运动过程是十分重要的一个阶段,因此相对准确的地面动力学模型对研究无人机的飞行控制具有十分重要的意义。本文在综合分析了无人机的地面运动状态之后,对地面数学模型进行了详细分析建立动力学模型以后,在Matlab/Simulink下进行模型仿真分析,仿真结果符合无人机实际地面运动的物理特性,证明模型有效。
参考文献
[1]陈晨,周洲.无人机滑跑起飞过程及其数学模型研究[J].科学技术与工程,2007,7(13):3198-3201.
[2]王茜,孙科.无人机地面运动控制与仿真[J].计算机测量与控制,2017,25(4):87-90.
[3]顾宏斌.飞机地面运行的动力学模型[J].航空学报,2001,22(2):163~167.
基金项目:2020年梧州市科学研究与技术开发计划项目(项目合同编号:200220013);
2022年度广西高校中青年教师基础能力提升项目(项目编号:2022KY0669)。
作者简介:陈丽城(1988-)女,汉族,广西贵港市,梧州学院讲师,硕士,研究方向:自动化,飞行控制,机器人控制。

 京公网安备 11011302003690号
京公网安备 11011302003690号


