



- 收藏
- 加入书签

基于数字孪生的智能产线设计与配置
 打开文本图片集
打开文本图片集

摘要:为了实现智能产线与数字孪生体之间数据的双向驱动,基于数字孪生系统架构,开发一种智能产线虚实联动系统。在PQ Factory 中搭建虚拟场景,建立设备控制、生产线状态监控、过程仿真等多种方式实现虚拟智能产线的仿真运行。基于TCP/IP协议的Socket网络通信模式,利用双向传输的设备状态、生产参数等数据驱动虚实模型同步运行。通过增加边缘计算、人工智能与机器学习、增强现实(AR)、大数据分析和区块链技术,该系统进一步提升了功能和性能。经测试,该系统具有良好的实时性与沉浸性,能够满足智能产线的实时监测与可视化控制要求,并为智能制造提供了有力支持。
关键词:数字孪生;智能产线;系统配置;工业4.0;制造业自动化等
课题项目:项目名称:基于数字孪生技术的智能产线系统构建及应用技术研究
1.引言
1.1 研究背景与意义
随着工业4.0的推进和智能制造的快速发展,制造业正经历着前所未有的变革。数字孪生技术作为一种新兴的技术手段,正在制造业中扮演着越来越重要的角色。数字孪生通过构建物理对象的虚拟模型,实现了物理世界和数字世界的无缝连接,从而能够实时监控、模拟和优化生产过程,提高生产效率和产品质量。
智能制造产线是现代制造业的重要组成部分,具有高度的自动化和智能化特征。基于数字孪生的智能制造产线设计,不仅可以提升生产线的灵活性和适应性,还能够显著降低生产成本,缩短产品的研发周期。
1.2 研究现状与发展趋势
目前,数字孪生技术在航空航天、汽车制造、能源等领域已有广泛应用,并取得了显著成果。然而,在制造业智能产线设计与系统配置方面的应用尚处于初步探索阶段。国内外学者和企业纷纷投入大量资源进行研究和开发,试图将数字孪生技术更好地应用于智能制造中。
随着技术的发展,数字孪生技术的应用场景不断拓展,从单一设备到整个生产线,甚至覆盖整个制造生态系统。同时,基于大数据、人工智能、物联网等技术的融合,数字孪生技术在智能制造中的应用前景愈加广阔。
1.3 研究目的与方法
本论文旨在探讨基于数字孪生的智能产线设计与系统配置方法,建立一个系统化的理论框架,并通过实际案例进行验证。具体研究目标包括:
(1)分析数字孪生技术在智能产线设计中的作用和优势;
(2)探讨智能产线的设计原则和关键技术;
(3)提出基于数字孪生的智能产线设计方法和系统配置策略;
(4)通过实际案例进行实验验证,分析研究成果。
为实现上述目标,论文将采用文献分析、理论研究、模型构建、实验验证等多种研究方法,确保研究的全面性和科学性。
2.智能产线数字孪生技术概述
2.1 智能产线数字孪生的定义与概念
智能产线数字孪生,塑造了一种高度综合的技术策略。该策略通过构建物理实体的精确虚拟副本,实现了物理世界与数字环境的无缝对接与即时互动。这套复合系统依托传感器、执行机构和控制系统,精确映射并持续监控生产线的运作状态、行为表现及功能发挥。在此基础上,借助网络化与智能化技术,系统自主进行决策制定与生产流程优化。此举不仅显著提高了生产效能、安全指数和产品品质,也通过数字化途径增强了生产的自动化程度和适应性。确保了信息的顺畅流通与互动反馈,进而促进了生产成本的降低和运营灵活性的提升。
2.2 智能产线数字孪生的核心技术
数字孪生与智能产线的核心技术融合,其核心在于实现物理世界与数字模型的实时同步与深度交互。这种技术的核心在于三维立体建模与综合物理域模拟的结合,通过高精度的传感装置应用,捕获实体产线的状态信息,并利用边缘计算实施进行即时数据处理与分析。同时,虚拟构建技术与智能算法的整合,使得算法能够通过神经网络深度训练进行自主学习与优化决策。此外,云计算基础设施与分布式数据储存系统的应用,为数字孪生提供了强大的数据处理和存储能力,保障了智能产线在数据驱动下的高效运行。工业网络布署与无线通讯技术的集成,确保了产线各环节的互联互通,实现了ERP、MES等多系统的无缝整合,推动了生产自动化与智能化的深度融合,从而提升了生产效率和质量。
2.3 数字孪生在制造业中的应用
目前数字孪生技术的应用主要是应用于码头运输、停车场位置分配、航空航天制造[1-3]等多个方面。数字孪生通过虚拟模型实时映射,让虚拟与现实双向数据交互和实时联动并提供可视化操控和实时监控功能,进行对实况的监控以提高系统的实时性和效率[4-5]。张超等,提出DTMC多维多尺度建模与边-云协同配置方法,旨在实现复杂零件工艺方案的智能科学决策与优化,以及加工质量的精密控制[6]。徐健等,研究的基于数字孪生的装配机器人建模及系统实现,可以实现工业装配机器人编程的自动化和智能化,提高编程效率和准确性,从而提升产品质量和生产效率,并通过实验验证了其有效性和实用性。[7]
3.基于数字孪生的智能产线设计与配置
3.1 数字孪生模型的设计
数字孪生技术模型的构建,需要用到SolidWorks,autoCAD,Unity 3D等软件,建模的原理都是首先要保证虚拟模型与物理实体是一一对应的映射关系,其次需要集成所有收集到的数据,如传感器数据,操作数据等,以保持虚拟模型与物理实体同步。基于此原理,结合先进的3D建模与物理模拟技术,即可打造出既精确又具备即时反馈能力的数字孪生模型,同时确保其具备适应生产线变化的需求扩展性和维护性。通过对标实际生产指标,对模型进行精确度校验,并根据反馈进行精细调优,以保障模型在实际应用中的稳定性和预测效能。此模型部署于生产流程的模拟、效率提升及预见性维护等方面,通过实践不断循环升级,能显著提高生产效能并有效降低运营成本。
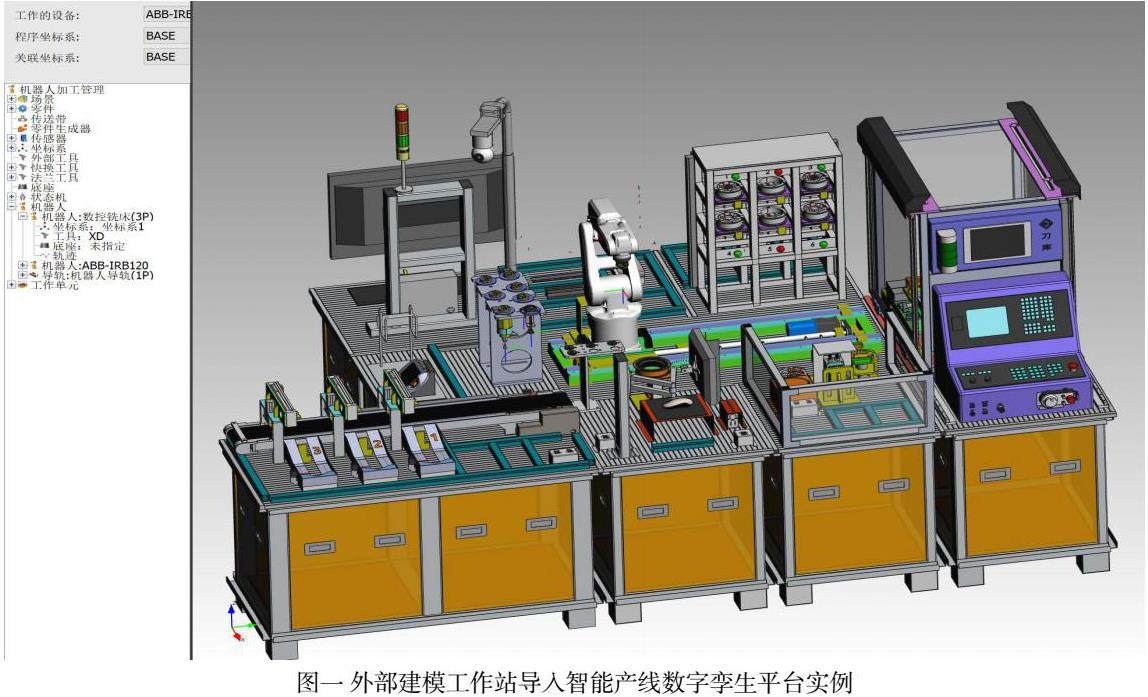
3.1.1外部模型导入
外部模型通过先进的建模工具进行构建,然后导入到PQ Factory进行产线的设计和调试。该方法不仅提高了模型的精确度和细节表现,还使得整个产线设计和调试过程更加直观和高效。PQ Factory作为一个高端的产线设计和调试平台,可以无缝地集成和处理这些外部模型,确保虚拟仿真和实际设备的高度一致性,从而大大提升了智能产线的设计效率和最终产品的质量。
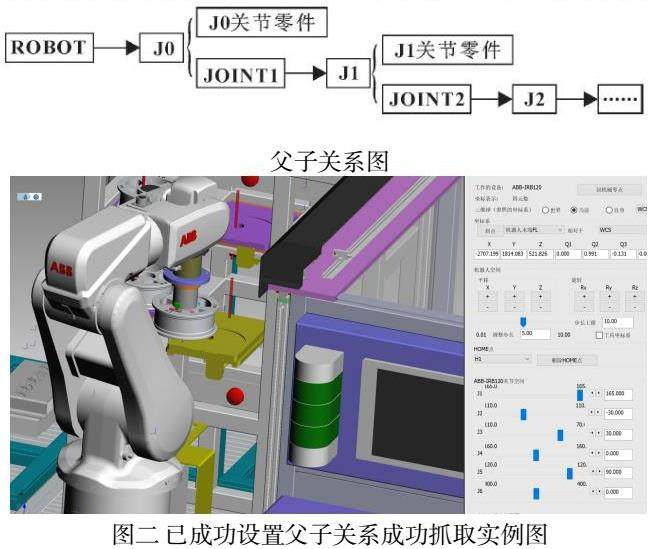
3.1.2虚拟场景搭建
在PQ Factory开发引擎中,搭建智能产线的虚拟场景是关键一步。设置各设备和组件的父子关系,使父物体运动时,包含的所有子物体都会跟随父物体运动。例如,将产线中的各个机械手臂和工作台设置为父子关系,并添加地面、工作台等物体,并为它们设置刚体组件。
3.1.3 通信系统设计及配置
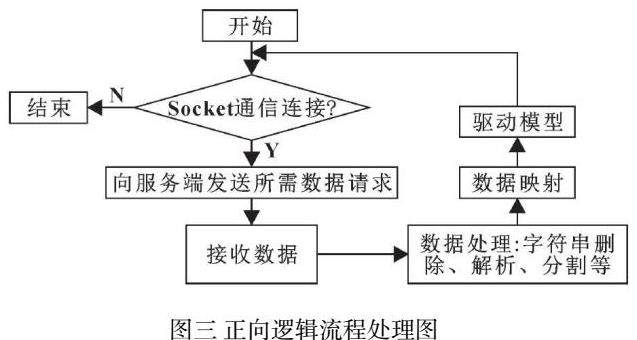
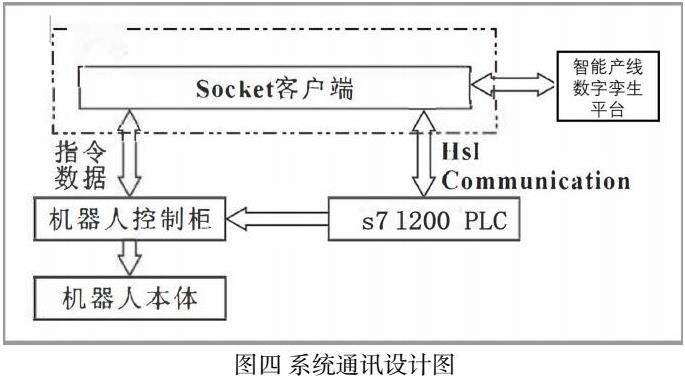
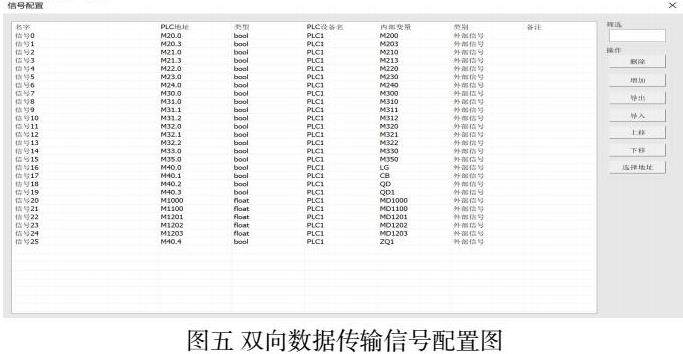
对于虚拟世界和物理世界之间的通信方式,采用基于 TCP/IP 协议的 Socket 网络通信模式。作为一种称为套接字消息传递的通信协议,它基于客户端-服务器架构,也包含了进行网络通信必须的 5 种信息:连接使用的协议、本地主机的 IP 地址、本地进程的协议端口、远地主机的 IP 地址、远地进程的协议端口,目前已经应用于多种工业设备。
系统同时与控制物理机器人的 PLC 进行通信,此工业机器人外部使用的 PLC 为西门子 S7 1500 系列。在系统中设置必要 IO 信号的开关,例如改变机器人的运动模式、运动状态、机器人急停等。为实现系统与 PLC 之间的通信,开发中使用 HslCommunication 开源库,此项目主要是用来解决复杂的底层网络通信问题,通过其提供的 API 函数,来高效地对 PLC 的 IO 数据进行读写。
采用基于TCP/IP协议的Socket网络通信模式实现虚拟世界与物理世界的通信。编写网关脚本作为Socket消息传递的客户端,智能设备的控制器作为服务器端。物理模型和虚拟模型通过套接字通道进行通信,并根据服务器端的IP地址和设置的端口号建立连接。在Unity中与控制器成功握手后,创建子线程进行数据的发送和接收,实现双向数据传输。
4.实验与结论
4.1实验数据与分析
系统监测实验需为工业机器人设定程序并启动,其后观察系统中虚拟机器人的运动状态与实体机器人有无同步。控制实验把关节控制、末端点位控制以及末端轨迹控制生成适宜的指令来进行测试,实验过程中的画面见于图六中。
4.2应用案例结论
(1) 系统的场景布置极具真实性,虚拟机器人建模精密度出色、结构完善,成功借助多种控制模式实现了对机器人的运动仿真。
(2) 可在场景中自由漫游,完全能够满足从各个角度观察虚拟机器人姿态的需要。在监测期间,实体机器人的运行状态能够实时同步展现;并且能够把虚拟模型运动仿真的动作传递给实体机器人,达成了虚实模型间的双向交互。
(3) 各部分功能运行顺遂流畅,人机交互事件的响应快捷高效,数据通信的延迟甚微,系统彰显出优良的实时性与沉浸感,有力地满足了针对工业机器人监测和控制的需求。
参考文献
[1]李玉,苌道方,高银萍,凌强.基于数字孪生的自动化集装箱码头多 AGV 动态调度[J].计算机集成制造系统,2023,29(12):4175-4190.
Li Yu,Chang Daofang,Gao Yinping,Ling Qiang.Dynamic Scheduling of Multiple AGVs in Automated Container Terminals Based on Digital Twin[J].Computer Integrated Manufacturing Systems,2023,29(12):4175-4190.
[2]尚可,张宇琳,张飞舟.基于数字孪生技术的智慧停车场总体架构[J].北京航空航天大学学报,2023,49(8):2029-2038.
Shang Ke,Zhang Yulin,Zhang Feizhou.General Architecture of Smart Parking Lots Based on Digital Twin Technology[J].Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2029-2038.
[3]陈振,丁晓,唐健钧,等.基于数字孪生的飞机装配车间生产管控模式探索[J].航空制造技术,2018,61(12):46-50.
Chen Zhen,Ding Xiao,Tang Jianjun,et al.Exploration of Production Control Mode in Aircraft Assembly Workshop Based on Digital Twin[J].Aviation Manufacturing Technology,2018,61(12):46-50.
[4]徐健,赵一剑,刘高峰,等,基于数字孪生的工业机器人建模及监测方法[J].西安工程大学学报,2024,38(2):124-133.
XU Jian,ZHA0 Yijian,LIU Gaofeng,et al.Modeling and monitoring methods for industrial robots based on digital twin ,Journal of Xi'an Polytechnic University,2024,38(2):124-133.
[5]文国军,祁靖烨,赵权,等.基于数字孪生的工业机器人虚实联动系统开发[J].机床与液压,2023,51(15):9-14.
WEN Guojun,QI Jingye,ZHAO Quan,et al.Development of virtual-real linkage system for industrial robots based on digital twin[J].Machine Tool & Hydraulics,2023,51(15):9-14.
[6]张超,周光辉,肖佳诚,秦天宇,周雅光.数字孪生制造单元多维多尺度建模与边—云协同配置[J].计算机集成制造系统,2023,29(2):355-371.
Zhang Chao,Zhou Guanghui,Xiao Jiacheng,Qin Tianyu,Zhou Yaguang.Multidimensional and Multi-scale Modeling and Edge-Cloud Collaborative Configuration of Digital Twin Manufacturing Units[J].Computer Integrated Manufacturing Systems,2023,29(2):355-371.
[7]徐健,宋鑫,刘秀平,等.基于数字孪生的装配机器人建模及系统实现[J].系统仿真学报,2023,35(7):1497-1507.
Reference format:Xu Jian,Song Xin,Liu Xiuping,et al.Modeling and System Realization of Assembly Robot Based on Digital Twin[J].Journal of System Simulation,2023,35(7):1497-1507.
[8]贲飞.基于虚拟现实的工业机器人运动仿真与控制研究[D].哈尔滨:哈尔滨理工大学,2019.
Ben Fei.Research on Motion Simulation and Control of Industrial Robots Based on Virtual Reality[D].Harbin:Harbin University of Science and Technology,2019.
[9]GARG G,KUTS V,ANBARJAFARI G.Digital twin forFANUC robots :industrial robot programming and simula-tion using virtual reality[J].Sustainability,2021,13(18):10336.

 京公网安备 11011302003690号
京公网安备 11011302003690号


