



- 收藏
- 加入书签

基于北斗/惯导组合定位的移动三维激光扫描系统在普速铁路机械化集中修的应用研究
 打开文本图片集
打开文本图片集
摘要:本文将基于北斗/惯导组合定位的移动三维激光扫描系统应用于普速铁路机械化集中修的轨道精调数据测量,获得了十分显著的效果。该方案利用三维激光扫描仪和CCD相机渲染得到的高精度、高密度空间点云融合图像,提取出轨道中心线和轨顶点信息,实现了对海量信息的快速分析,拟合生成适用于数字化大机捣固作业格式的拨道量和抬道量数据。本文通过对锦华铁路机械化集中修中上述技术方案成功应用的案例介绍,阐明了移动三维激光扫描设备在普速铁路大型机械化轨道精测精捣方面的优势。
关键词:北斗定位;三维激光扫描技术;点云融合图像;机械化集中修;大机捣固
引言
随着锦华铁路运量的不断提升,重载列车通过对数逐年升高,对工务专业线路设备的养护维修标准提出了更高要求,留给现场人员检修作业的列车运行间隔愈发短促,尤其是赤峰至大板段开通客运后对工务设备的检测方法和维修手段提出了新要求。传统的设备静态检查测量工作采用以线路中心线为基准的接触式测量(如轨道检查仪和惯导小车),对日常行车影响大,安全性低,数据采集效率不高。因此,引入高新技术,改进测量手段,提高测量效率就显得十分必要。高质量、高精度的测量方法既可以在轨道状态检查和设备质量评定中发挥决定性作用,同时也能为保障客运干线的平顺性和舒适度打下坚固的技术支撑。
1.当前既有线测量技术现状
以往的既有线测量方法主要依靠人工上道测量方法。传统的“经纬仪+水准仪”或者“光电测距仪+全站仪”铁路线路测量模式需要较长时间,BDS-RTK 技术在测量基准点选取、测量数据处理等方面与以往的测量模式相比有明显提升,特别是在提高测量效率、降低外业劳动强度等方面效果显著,但接触式作业模式对铁路正常运营有干扰。随着行车密度增加、速度提高,线路测量作业条件和安全性得不到保障,测量效率也无法保障。在铁路施工及运营过程中,为保障工程设计、施工及运营过程的科学性和安全性,往往需要分阶段多次实施高精度工程测量,以往的人工“步行手推”式测量方法已无法满足长距离轨道施工测量的要求。在这种现实需求下,创新外业数据测量的设备和工法,进一步降低测量、施工过程对行车的干扰,已势在必行。
2.移动三维激光扫描技术设计
三维激光扫描技术又称“实景复制技术”。近年来,三维激光扫描仪已经形成由“固定式”向“移动式”的发展趋势,当下最为热点的就是车载式三维激光扫描系统。本文重点介绍的原创型测量系统如图1所示,是一种以电动小车(锂电池供电)为平台,创新性地将GNSS系统、激光惯导系统、激光扫描仪(LiDAR)、高分辨率 CCD 相机、同步控制模块集合而成的非接触式移动扫描测量系统。额定工作速度 0-15km/h(最高20km/h),可模块化安装GNSS天线、激光惯导、激光扫描仪、同步控制单元等检测设备。
激光扫描仪的扫描工作方式为线扫式,其扫描频率在 30KHz 以上。随着电动小车的走行,测量系统会不间断地扫描270°范围内的所有被测物体,实现测距精度≤2mm、线路横向偏差绝对精度±15mm、线路垂向偏差绝对精度±20mm、线路相对偏差相对精度±2mm的控制标准。
通过 BDS 载波相位差分定位技术获取激光扫描仪的位置参数,结合激光惯导系统(IMU)测定激光扫描仪的姿态参数,系统可分析获取沿线纵深 100 米扫描范围内物体的三维空间坐标信息,同时高分辨率的 CCD 相机辅助沿线地形地貌影像采集。
将多组采集数据按照时间整合后,再进行空间坐标变换,即可实现统一坐标系下的一致性描述,快速获取海量的激光点云数据,并同步获取与点云高度时空匹配的数码照片,最后便拟合生成了高精度、高密度的激光点云融合图像。图像数据密度可依据实际需要,通过控制电动小车的走行速度来调整。小车走行速度越快,图像数据密度越小。
将三维空间划分为微小体素单元,对各体素内点云数据进行统计分析、融合处理,消除冗余、填补空洞,最终构建出连续、平滑的铁路设施一体化模型,即激光点云融合图像。该图像支持二次开发利用,将其导入线形设计软件即可实现铁路特征参数提取,进行轨道线型计算和轨道调整方案设计,自动化计算输出满足铁路大修设计和数字化机捣要求的轨道精测成果。
3.测量技术成果及应用案例
测量地点:锦华铁路锦赤线K4+000-K295+000
施工单位:赤峰铁路分公司西水地工务段
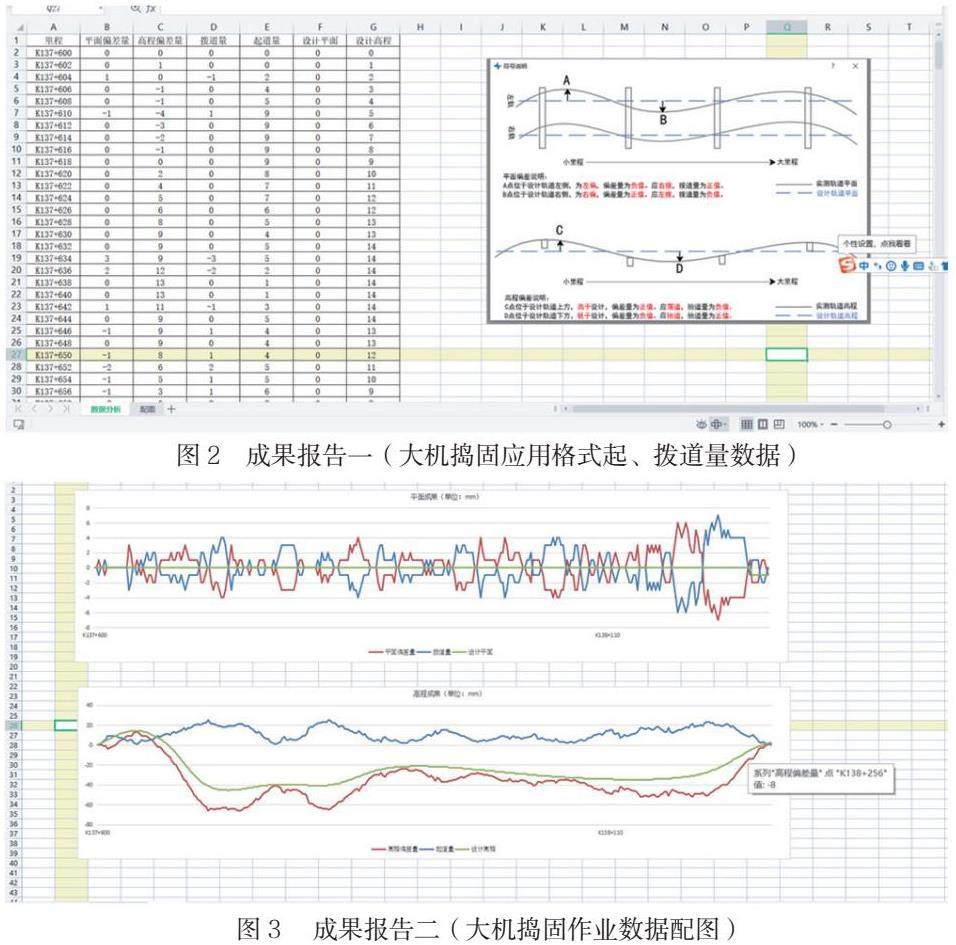
施工要求:利用高精度三维激光移动测量系统进行全线80km数据采集,并利用后处理工具进行点云高精度质量增强,得到绝对精度优于2cm的点云融合图像,而后利用点云融合图像提取沿线轨道中线及轨顶面坐标,根据轨道当前线位优化目标线位,并输出适用于线捣应用格式的成果报告,分别如图2、图3所示。根据线路里程较长这一特点,本次施工选用了电动小车代替人工上道作业进行大机捣固数据采集。
在三维激光扫描测量模式下,以往两个作业班组8小时的外业采集作业量,仅需4人在2小时内就可以高质量完成。在规定的工期时限内,完成了对80km有砟轨道5遍精测工作。采用三维激光扫描测量技术获取到线路点云融合数据后,可视为得到了线路的全息信息。一次测量即可解决大机捣固数据测量、平纵断面测绘、限界调查等需多人多次上线才能完成的作业内容。经综合检测车轨道动态检测评估,大机捣固工后全线TQI平均下降1.10,表明三维激光移动扫描测量技术具有高效的外业采集和数据处理能力,满足既有线大机捣固数据的精度要求,具有十分重要的使用和推广价值。
4.技术经济效益分析
将三维激光扫描测量系统整体加装在电动小车上进行测量作业,目的就是为了能在更长,更远的范围内获取测区点云数据。其成果可以应用于大机捣固作业、结构变形监测、路基边坡土方计算等多方面,而且具有以下2个方面的优势:
(1)作业人员上道率低,工作强度小,作业效率和安全系数高。
在列车速度日益提高,行车密度越来越大的今天,既有线上道作业是测量工作中最大的安全隐患。采用车载式,区间内长距离数据采集作业可安排在天窗内完成,比起以往利用列车间隔作业,作业人员只需在设备组装完毕后对系统数据采集软件进行现场操作,外业工作量和工作强度大大减少,区间内作业人员只需在完成基站的架设以及布标的作业后及时下道避车,其安全性大大提高。
(2)节省大量人力资源,经济效益好。
在测量作业中,传统测量方式与快速测量方式在所需设备、上道次数、作业效率和人员分工等方面存在显著差异。
经过统计分析,通常采用传统测量方法完成既有线测量需要上线三次,需要18至26人次的上线作业。快速测量方式则主要依靠电动小车、车载激光扫描系统、全站仪和北斗接收机等设备,三种测量项目所需设备相同。上道次数也为 1 次,但作业效率大幅提升至 15km/h。人员分工较为精简,总共仅需 4 人,其中 2 人在小车测量前进行标志测量和标定工作,每小时可作业 3km,该工作一次性完成,另外 2 人负责扫描时的设备操作,行车速度达 15km/h。
在新的作业模式下,车载三维激光移动扫描测量技术节约了60%以上的人力资源,相同作业条件下完成任务量至少是传统人工上道作业模式的10倍,在保证了测量的安全性的同时,极大地提高了生产效率。
5.结语
目前,对铁路线路测量技术的国内外最新研究主要集中在“BDS、GIS、RS”相结合的多传感器集成和移动测绘技术的组合应用。相较于传统测绘方式,三维激光移动扫描技术在数据采集效率和数据丰富程度方面具有无可比拟的突出优势。本文提出的基于激光扫描、惯性测量与GNSS定位技术的轨道高精度数据采集装置,能够实现多种场景下数据高效采集。在测量精度上,三维激光扫描移动测量系统的精度也随着 GNSS、惯导、CCD相机、激光扫描仪等硬件和组合导航算法的发展而不断提升。经过大量实践验证,该系统整体方案成熟稳定。可以预见,利用三维激光扫描移动测绘方式对线路进行勘测和检测是铁路技术发展的必然趋势,对于提高线路测量的质量效率和安全保障具有重要意义。
参考文献:
[1]汤建凤.一种基于车载激光雷达技术的既有线测量方法.铁道建筑技术.2016(10)
[2]陈丞.基于车载Lidar点云的铁路轨道精确建模.西南交通大学博士论文.2019(05)
[3]张琰,孔祥思,徐西桂.基于移动三维激光扫描的隧道结构监测方案研究与应用.矿山测量.2021(02)
[4]刘长瑞.车载激光雷达测量技术在铁路既有线复测中的应用.工程建设与设计.2020(07).
作者简介:
李艳伟(1988-),男,内蒙古赤峰人,工程师,从事铁路工务研究。

 京公网安备 11011302003690号
京公网安备 11011302003690号


