



- 收藏
- 加入书签

基于仓储火灾预防的可燃气体循迹小车设计
 打开文本图片集
打开文本图片集



摘要:火灾在现实生活中是非常普遍的,它被称为三大自然灾害之一。随着社会与国家的发展,在经济迅速增长的同时,各种危险场所不可避免的火灾频繁出现,给社会安全造成了很多隐患,于是现代火灾的预测和及时补救已成为迫在眉睫需要解决的问题,仓库是集中储存物资的场所,一旦失火,火势容易蔓延为保障人员和物资的安全,所以必须坚决预防和消除仓库的火灾。当仓库火灾发生时消防人员时时刻刻冲到第一线,面临生命危险,在这种背景下,智能化机械化的循迹灭火系统应运而生,实现了对安全防护的质的提高,也大大地减低了消防人员的危险。在日常,巡防小车对仓库的温度和气体进行检测,并在超标时报警,采取必要措施,可大大降低仓库火灾的发生。
关键词:循迹;检测;报警
课题项目:资助项目:天津市级大学生创新创业项目资助(202410066052)
1.引言
1.1研究背景及其意义
随着全球经济的快速发展,仓储行业和物流行业快速壮大,仓储火灾的发生愈加频繁,仓储的火灾防范变得越来越重要。但由于仓储环境的复杂性,传统管理方式主要依靠人工巡检,不仅效率低下耗费人力财力,而且可能存在监测死角或无法及时发现火灾等纰漏问题。因此,设计一种能够用于仓储环境的自动检测可燃气体的智能循迹小车具有重要的实际意义。本文中智能循迹小车能够通过检测仓库气体浓度进行自动循迹并寻找可能的火灾源,从而提高仓储火灾实时监控的效率和准确性,及时避免火灾的发生,减少生命和财产损失。
本课题旨在设计一款自动检测气体浓度进行循迹和预防火灾的智能仓储巡防小车,包括检测系统、单片机以及电机驱动控制系统和数据传输系统。检测系统由气体传感器MQ-7,温湿度传感器DHT11以及超声波传感器和红外传感器组成,使用气体传感器、温度传感器和单片机控制系统,实现对仓储环境的温度、气体浓度的实时监测。当传感器检测到的温度和气体浓度达到起火标准时,通过物联网技术将数据和警告型号上传到控制中心,并自动灭火,确保货物的质量和安全。同时,该小车还具有避障功能,能够在仓储环境中自主行驶。
1.2国外研究现状
国外在气体检测技术方面起步较早,技术相对成熟。例如,美国、德国等国家在光谱分析、激光遥感等领域有深入研究,并开发了多种气体检测设备和系统。国外在农业生产及工业污染等的治理工作上制定了相关标准,这也促进了研究有害气体的电化学传感器技术。首次利用剥离高定向热解石墨获得相对独立的高品质石墨烯,并分析了石墨烯具备的电学性能,为石墨烯材料对敏感性气体的检测打下良好基础。一些欧美发达国家现已将最新研究成果运用于优化传感器阵列中,而国外的有害气体电化学的传感器技术明显体现在有害气体电化学的传感器阵列技术,这项技术最早在科技相对先进的一些西方发达国家和地区兴起。这项研究在有害气体电化学的传感器阵列信号及模式的识别与处理中开展了较为成功的创新,在20世纪90年代就研制出了商品化设备,有效应用于检测不同的有害气体。同时利用研究新材料,使传感器性能得以提高,有效提升了传感器技术的创新,目前在不同领域已被广泛地推广应用。
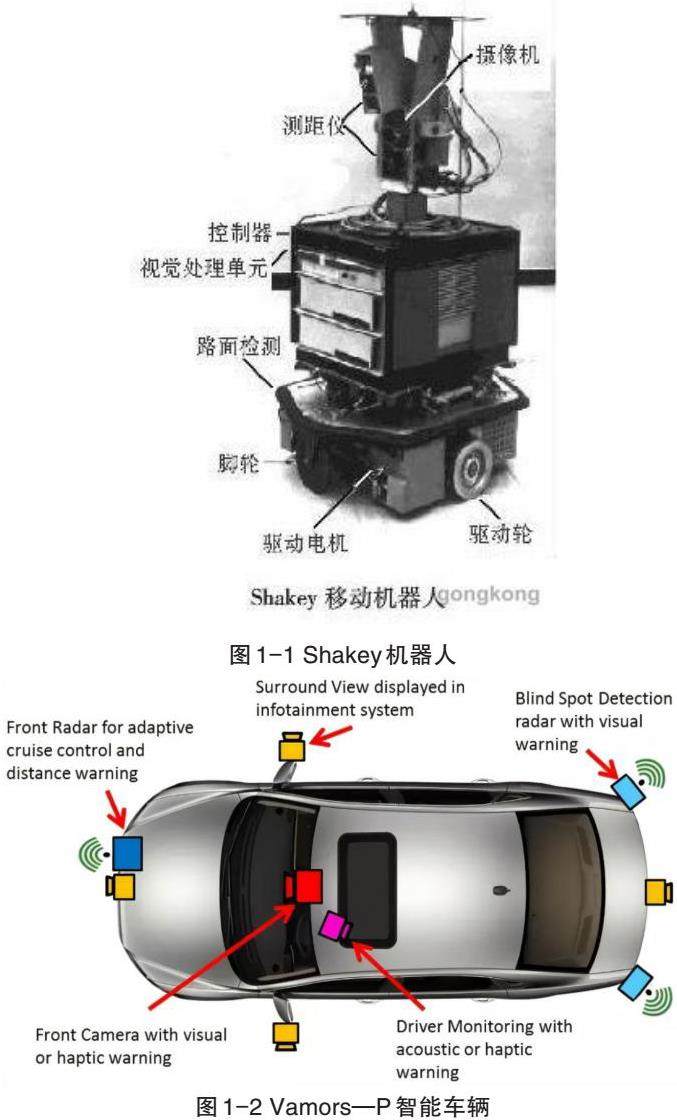
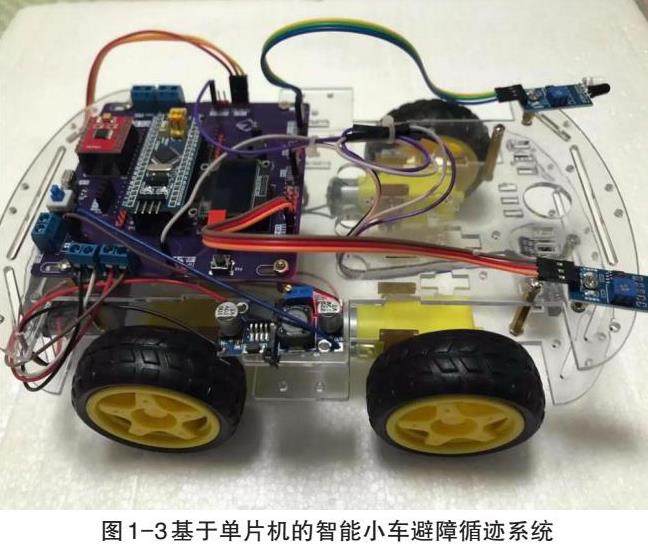
20世纪20年代中期,全球首个自动导车系统(Automated Guided Vehicle System,AGVS)[1]由美国的巴雷特电子公司研制成功。20世纪50年代初,国外已经展开了对AI技术、机器人视觉、自动导航等移动机器人系统的相关技术研究。1966年~1972年期间,美国斯坦福研究院(SRI)的Nils Nilssen和Charles Rosen等人研制出了一款名为Shakey的自主移动式机器人[2],其研究的目标是把AI技术和机器学习技术运用到实际的场景中,并能自主地完成感知、控制、决策等复杂任务。2004年1月,美国宇航局研发的“勇气”号和“机遇”号火星探测车成功登陆火星,依靠太阳能电池板获取能量。两辆探测车均为六轮驱动结构,搭载了全景相机、阿尔法粒子探测器、X射线光谱仪等,拍摄下了火星表面的立体和彩色全景照片,并分析了火星上的土壤及岩石成分。截至2017年1月25日,“机遇”号火星探测车行驶总里程数达到43.87公里,打破了NASA在地球外的无人探测车移动的记录,整个探测过程中发现了陨石、防热护盾岩、地下水层等重大成果。美国卡内基·梅隆大学机器人研究所研制的NavLab系列智能车辆,利用视觉传感器进行循迹[3],并通过线性加速度计和角度变化传感器实现避障。德国的Vamors—P智能车辆系统,同样采用视觉传感器和多种传感器实现高级的循迹和避障功能。这些技术虽然效果良好,但成本较高。
1.3国内研究现状
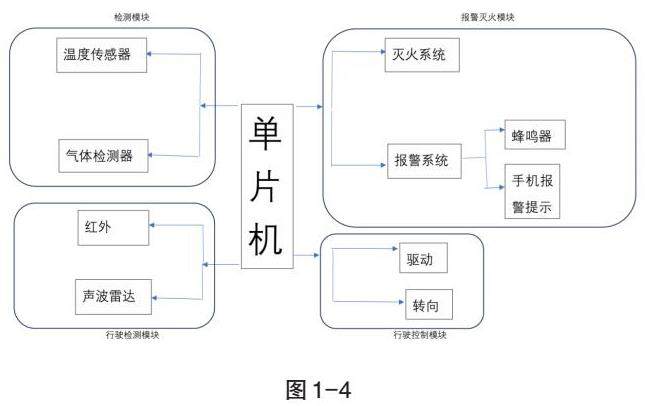
国内在循迹小车领域的研究已经取得了一定的进展。主要运用红外探测法和超声波探测法循迹避障,无锡科技职业学院的顾群等设计了一种基于单片机的智能小车避障循迹系统,小车采用HC-SR04超声波模块进行障碍物检测,采用红外探测法进行黑线循迹。但是该智能小车的设计缺点是超声波传播方向有一定的误差,不稳定。解放军理工大学电子信息工程系的薛红等设计了一款循迹避障智能小车。该小车将AT89S52作为控制器,通过红外检测器检测外部信号对小车进行控制。循迹和避障都是依据红外探测原理,但缺点就是不灵敏,反应会比较迟钝。河南科技学院的李晓娟等设计了基于蓝牙的循迹避障智能小车。该设计中的车头和车尾都安装了红外避障模块,在小车的运行过程中,如果小车在避障碍模块的检测范围内检测到障碍物,单片机就会接受到信号,命令小车停止。该设计的缺点是蓝牙模块固定在小车上面,只要超过一定距离就会失效,无法完全实现智能。
在气体检测方面,国内气体传感器技术不断进步,气体检测小车通常采用多种气体传感器来检测不同类型的气体。气体传感器可以分为半导体气体传感器、催化燃烧气体传感器、电化学气体传感器、光学气体传感器、超声波气体传感器、光电离子探测气体传感器等。这些传感器的灵敏度、选择性和稳定性不断提高,能够更准确地检测到低浓度的气体,并且对多种气体具有较好的分辨能力。根据全球知名市场情报咨询公司Mordor Intelligence 统计及预测,2018-2020年电化学气体传感器在全球气体传感器市场中份额最大,市场份额维持在52%左右:红外技术的市场份额逐年提升,至2020年已达24.06%。在我国高校与中科院系统中,有较多的单位与学者参与气体传感器研究。其中吉林大学是从事气敏研究最早也是实力最雄厚的,被誉为“北气敏”,研究包括半导体传感器,电化学传感器,催化燃烧型传感器等多种气体传感器。华中科技大学、电子科技大学等院校在不同类型的传感器及气敏材料研究上具备较强的实力。中科院下辖的半导体所、微系统所、电子学所、微电子所等在传感器与集成系统上有着深厚的研究基础。
1.4研究内容
在本课题所设计的智能仓储巡防小车上,气体浓度监测与分析是极为关键的一项功能。选用高精度的气体传感器MQ7,其能够敏锐且精准地对仓储环境中的各类气体进行感知与检测。该气体传感器具备广泛的检测范围,可以针对仓储环境中常见的如一氧化碳、二氧化碳、甲烷等多种气体的浓度进行实时且连续的监测。当气体传感器开始工作后,它会将所检测到的气体浓度相关的模拟信号迅速传输给51单片机控制系统。51单片机作为整个系统的核心控制单元,会对接收到的模拟信号进行一系列复杂且高效的模数转换以及数据分析处理操作。它能够依据预先设定好的各类气体浓度阈值标准,对当前检测到的气体浓度数据进行细致比对与分析。例如,对于一氧化碳气体,若其浓度在短时间内出现异常升高且超过了所设定的安全阈值,单片机便会立刻识别出这一危险情况,并为后续可能采取的预防火灾等相关措施提供准确的数据支持,从而为保障仓储环境的安全奠定坚实的数据基础。
温湿度检测同样是该智能仓储巡防系统不可或缺的重要组成部分。在这个模块中,配备了高灵敏度的温湿度传感器DHT11。
测量温度范围:0-50℃,精度±2℃;湿度范围20%-90%RH,精度±5%RH。其被精准地安置在小车的合适位置,以便能够全面且准确地获取仓储环境各个角落的温度信息。它能够实时感知仓储环境温度的细微变化,一旦检测到温度数据,同样会将其以相应的信号形式传送给51单片机控制系统。
为了确保智能仓储巡防小车能够在复杂的仓储环境中安全且顺畅地自主行驶,障碍检测功能的设置至关重要。在小车模块中,专门配备了红外探测器以及声波雷达探测装置。红外探测器利用红外线的反射原理,不断地向小车前方及周边区域发射红外线信号。当这些红外线遇到障碍物时,便会产生反射,红外探测器接收到反射回来的红外线后,能够迅速判断出障碍物的存在,并通过内部的电路系统将这一障碍信息转化为电信号传送给L298N电机驱动部分以及51单片机控制系统。与此同时,声波雷达探测装置则是通过发射超声波并接收其反射波来检测障碍物。它可以精确地测量出小车与障碍物之间的距离,并且能够根据反射波的时间差等参数准确判断出障碍物的方位。这两种检测方式,使得小车能够更全面、更准确地感知周围环境中的障碍情况,无论是大型的货架、堆放的货物,还是其他一些可能出现在行驶路径上的小型障碍物,都能被及时发现,从而为小车及时调整行驶方向、避开障碍提供了可靠的依据,保障了小车在仓储环境中的行驶安全。
智能仓储巡防小车的循迹行进功能是通过巧妙地结合气体浓度检测和障碍检测两项关键技术来实现的。一方面,气体浓度检测为小车的寻迹行进提供了一种特殊的方向。在仓储环境中,不同区域可能由于货物存储种类、通风情况等因素的不同,其气体浓度分布存在一定的差异。例如,某些区域可能因为存放了特定的化学品而导致局部气体浓度有别于其他区域。小车通过持续监测气体浓度的变化情况,可以依据这些气体浓度的差异来大致判断自己所处的位置以及应该前往的方向,从而实现一种基于气体浓度特征的寻迹功能。另一方面,障碍检测则为小车的行进安全保驾护航。如前文所述,红外探测器和声波雷达探测装置能够实时检测到小车前方及周边的障碍物信息。当小车在依据气体浓度进行寻迹行进的过程中,一旦检测到前方有障碍物,便会根据障碍物的距离、方位等信息,通过L298N电机驱动部分及时调整小车的行驶速度和方向,确保小车能够巧妙地绕过障碍物,继续沿着合理的路径前行,既能够按照气体浓度特征所指引的方向前进,又能够避开途中遇到的各种障碍,从而实现了高效且安全的寻迹行进功能,使得小车能够在仓储环境中自如地穿梭,完成巡防任务。
在智能仓储巡防系统中,预防、报警以及存储火灾信息这几个环节紧密相连,共同构成了保障仓储安全的重要防线。预防火灾方面,首先是通过温度和气体浓度的实时监测来实现的。当温度传感器检测到仓储环境中的温度逐渐升高且接近可能引发火灾的临界温度值,或者气体传感器检测到某些易燃、易爆气体的浓度达到了危险的临界值时,系统便会立即启动一系列的预防措施。例如,小车可以自动调整行驶路线,前往温湿度或气体浓度异常的区域进行更近距离的巡查,以便进一步确认情况并采取相应的处理措施,从而尽可能地将火灾隐患扼杀在萌芽状态。报警功能则是在检测到火灾相关的危险情况达到一定程度时启动。当温度和气体浓度同时满足预先设定的起火标准时,51单片机控制系统会迅速通过物联网技术将包含温度、气体浓度等详细数据的报警信息上传到控制中心。在控制中心,工作人员可以第一时间接收到这些报警信息,同时,小车自身也会配备相应的蜂鸣器报警器,在仓储环境内发出响亮的警报声,以便附近的工作人员能够及时察觉到危险情况并采取行动。
最后,关于火灾信息的存储,51单片机控制系统会将每一次检测到的温度、气体浓度等与火灾相关的数据信息进行详细记录,并将这些记录按照时间顺序进行存储。这些存储的信息对于后续分析火灾发生的原因、总结预防火灾的经验教训等都具有非常重要的价值。通过对这些历史数据的分析,可以不断优化系统的设置,比如调整温度和气体浓度的阈值标准等,从而进一步提高整个智能仓储巡防系统预防火灾的能力和效率。
2.循迹原理
2.1 原理概述:
由于不同仓库存放的物品不同,发生火灾时产生的气体相应不同,这里以一氧化碳气体为代表,研究气体循迹原理-:通过在小车四个方向上安装MQ-7一氧化碳气检测器,结合AT89C51单片机的数据分析和PID 算法程序控制,实现了对气体源方向的准确判断以及小车的自动转向,为气体检测和追踪提供了一种有效的解决方案。在这个系统中,AT89C51单片机作为整个系统的核心控制单元,具有强大的数据处理能力,小车的四个方向上安装的MQ-7一氧化碳检测器起着关键的作用。这些气体检测器能够敏锐地感知周围环境中的天然气,并将检测到的信号实时传送给AT89C51单片机。当接收到来自MQ-7一氧化碳检测器的信号后,AT89C51单片机首先对这些数据进行分析。它会将各个方向测定的数据与预先设定的数据进行比较,通过这种方式准确判断气体源的方向。此时,比较各个方向测定数据与设定数据的高低是一个关键步骤。如果某个方向的测定数据明显高于设定数据,那么就可以初步判断气体源可能在这个方向上。然而,为了更加准确地确定气体源的方向,还需要综合考虑其他方向的数据以及环境因素的影响。在确定了气体源的方向后,AT89C51单片机通过执行PID 算法程序来控制小车的舵机,从而实现小车的转向。PID 算法是一种常用的控制算法,它能够根据实际情况不断调整控制参数,以实现对系统的精确控制。通过PID 算法,小车可以更加平稳、快速地转向气体源的方向,提高了系统的响应速度和准确性。
2.2 PID算法
PID算法是一种常用的控制算法,用于控制系统的稳定性和准确性,在工业控制、机器人、自动驾驶等众多领域广泛应用。PID是比例(Proportional)、积分(Integral)、微分(Differential)的缩写。其基本原理是通过计算误差信号来调整控制器的输出,使系统输出尽可能接近目标值。
其中:Kp为比例控制参数,控制当前浓度误差对移动方向或速度的影响;它的作用是对当前误差,作出反应。比例系数越大,系统的响应速度越快,但可能会导致系统超调(超过目标值)和不稳定。公式为Up(t)=Kp*e(t),Kp是比例系数,e(t)是误差。
KI为积分控制参数,控制过去浓度误差的累积对移动方向或速度的影响;主要用于消除系统的稳态误差。它对误差进行积分,随着时间和累,只要存在误差,积分项就会不断增大,推动控制器输出变化,直到误差为零。公式为Ui(t)=Ki∫e(T)dT,Ki是积分系数。
KD为微分控制参数,预测未来浓度误差的变化趋势,调整移动方向或速度以避免过冲。根据误差的变化率来提前调整控制量,用于改善系统的动态性能,抑制系统超调。例如,当误差快速变化时,微分环节会产生一个较大的控制作用,使系统更快地稳定下来。公式为Ud(t)=[Kd*de(t)]/dt,Kd是微分系数。
PID控制器输出的公式为U(t)=Up(t)+Ui(t)+Ud(t)
计算机控制系统中使用数字PID控制器,通过数值逼近的方法,用求和代替积分,用差分代替微分,控制规律为:
式中,Kp为比例放大系数,Ki为积分系数,Kd为微分系数,u(k)为第k次输出值,e(k)为第k次的偏差,PID控制的基础是比例控制,它对偏差是及时反应的,只要有偏差产生,比例控制器立即产生控制作用;微分控制与偏差的变化成正比关系,可加快系统的响应速度,改善系统的动态性能;积分控制可以消除稳态误差,但会降低响应速度。由于循迹竞速小车对路径变化响应的及时性要求较高,所以去掉了积分控制环节,采用PID控制算法控制舵机转向,消除小车与黑色轨迹中心的横向偏差,使小车中心控制在黑线轨迹中央。根据小车中心轴与轨迹中线的偏差x(k)及其变化x(k)-x(k-1),按照PID 算法控制方程输出舵机的打角控制量:
系统性能的好坏主要取决于PID控制参数的选择是否合理。通过反复实验调整,选择合适的比例系数Kp和微分系数Kd可以使小车较好地沿着轨迹运行,但速度较高时,小车运行抖动明显,速度难以进一步提高。这是因为传统PID 控制器在控制过程中不会随着偏差或偏差变化率的变化而改变,不能根据路况及时调整控制参数,很难实现良好的控制效果。
Kp,Ki,Kd可由经验法,试凑法,理论计算法测出。
经验法:根据经验和一些简单的实验来初步设定参数。比如对于一些常见的简单控制系统,先设置Kp,使系统能够有初步的响应,再逐步增加Ki;来消除稳态误差,最后适当增加Kd来改善动态性能。
试凑法:先设定一组初始参数、观察系统的响应,如超调量、调节时间等性能指标。如果超调量过大,就适当减小Kp或Kd;如果稳态误差大,就增加Ki。在Kp调整合适后,再调整Ki来消除稳态误差。Ki太大会使系统超调增加、稳定性降低,所以要逐步增加并观察。Kd主要用于改善系统的动态性能,如抑制超调,通常在Kp和Ki调整后,根据系统响应的振荡情况适当增加或减小Kd。要不断调整参数,直到系统性能达到满意的结果。
理论计算法:
对于一些可以建立精确数学模型的系统,可以通过理论计算得到PID参数。不过实际系统往往比较复杂,数学模型很难完全精准,所以这种方法在实际应用中有一定局限性。
3.系统测试
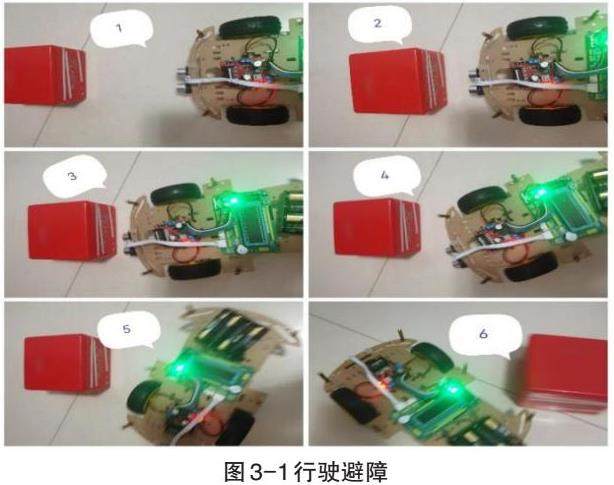
3.1行驶检测模块:小车行驶检测模块由L298N电机驱动模块、HC-SR04超声波测距检测模块和CF-51传感器红外检测避障组成。在小车行驶过程当中,HC-SR04超声波检测器发射声波,声波遇到障碍物产生回波,数据传输到51单片机,单片机分析数据,将行驶指令传给L298N电机控制小车行驶。若检测到障碍物,则小车停止行进,进行转向;CF-51传感器与HC-SR04超声波检测器配合工作。
3.2气体检测与温湿度检测报警模块:该模块由MQ7一氧化碳检测器和温湿度传感器DHT11组成。首先,传感器负责气体和温度的采集、传送工作,不断地监测气体浓度和温湿度信号,并传送给单片机;然后,信号在单片机内完成转换,单片机运算分析并比较检测数据与设定数据的大小,执行设定的程序,若测定值大于设定值,经过处理的数据在手机上报警提醒,并使蜂鸣器报警。
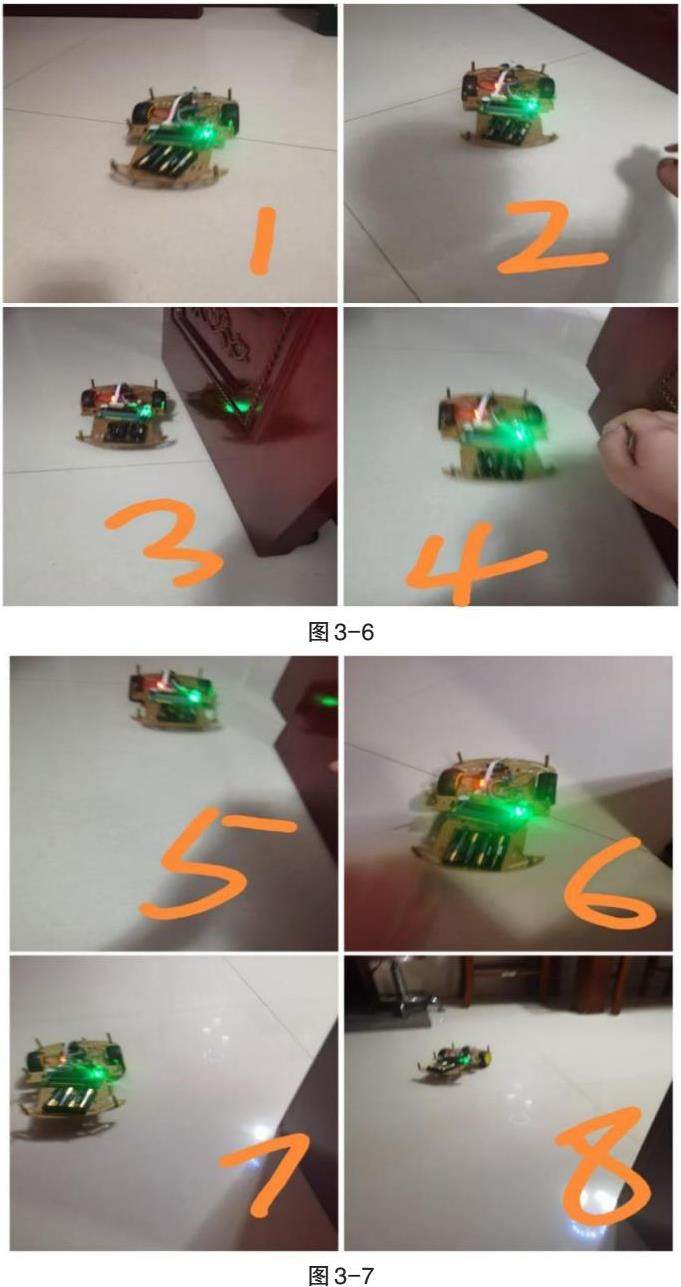
图3-6与图3-7两图展示了小车根据气体检测实现循迹。
参考文献
[1]ecke,H.J.,&Schraft,R.D.(1977). Automated Guided Vehicle Systems.这篇论文系统地介绍了AGVS的基本原理、导引技术和应用场景,是早期AGVS研究的重要文献.
[2]Nilsson,N.J.(1969). A Mobile Automaton:An Application of Artificial Intelligence Techniques.这篇论文详细介绍了Shakey的设计原理,感知系统和路径规划算法.
[3]Thorpe,C.,&Kanade,T.(1988). Vision and Navigation for the Carnegie Mellon NavLab.这篇论文介绍了NavLab 1的视觉导航系统.
作者简介:张晓宇(2004-)男,汉族,本科在校生。
通讯作者简介:张旭(1985-)女,汉族,讲师。

 京公网安备 11011302003690号
京公网安备 11011302003690号


