



- 收藏
- 加入书签

基于刚柔耦合车辆模型的SH-ADD混合控制仿真分析
 打开文本图片集
打开文本图片集
摘要:为使仿真效果更加接近实际,系统的研究了弹性车体对高速车辆动力学性能的影响,并采用比刚体模型更为准确的刚柔耦合模型进行了半主动控制仿真分析。首先建立了车体的有限元模型,并将车体有限元模型导入ADAMS/Rail软件,然后将柔性车体子系统和前、后转向架子系统组装成刚柔耦合集成模型,分析了其对列车运动稳定性、运行平稳性、安全性的影响。然后对刚柔耦合模型采用SH-ADD控制策略对其进行联合仿真分析,以获得比刚性车体更加贴合实际的控制效果。通过仿真表明:弹性车体模型会使整车各项动力学性能指标大于刚性车体模型,即弹性车体的安全性要比刚性车体的差;采用SH-ADD控制策略的车体比普通控制策略的运行平稳性要好,舒适性更高。
关键词:高速列车;刚柔耦合;ADAMS/Rail;SH-ADD;联合仿真
中图分类号:U270.1 文献标识码:A 文章编号:
引言
列车运行速度不断提高,其舒适性也不断恶化。为避免列车振动加剧给乘客带来的不适,改善乘车舒适度,有必要对车体进行主动、半主动控制[1-6]。而长期以来,人们在对轨道车辆进行控制仿真分析时,往往都是以刚体模型为研究对象的。但是,随着列车运行速度提高和车体轻量化技术的应用,实际运行中作用于机车车辆与轨道结构之间的动态作用力增大,使系统动力学特性愈来愈复杂,这些现象是由于部件的大范围运动与构件的弹性变形耦合引起的,采用纯刚体列车模型已经不能很好的反应出列车实际的运行状态。为更好的分析部件的动力学特性,得到的数据更加贴合实际,有必要从柔性体的角度来研究。在车辆动力学仿真研究中,刚柔耦合是具有广泛应用前景的发展方向之一。文献[7-11]建立了刚柔耦合模型并进行了动力学仿真,与刚性车进行了对比。文献[12]以刚柔耦合模型为研究对象,采用参数自调整模糊控制,有效降低了车体的横向振动。本文首先建立了比刚体模型更加准确的刚柔耦合模型,与刚性体进行对比并分析其对动力学性能的影响,然后以刚柔耦合模型作为研究对象对其进行半主动控制联合仿真分析。
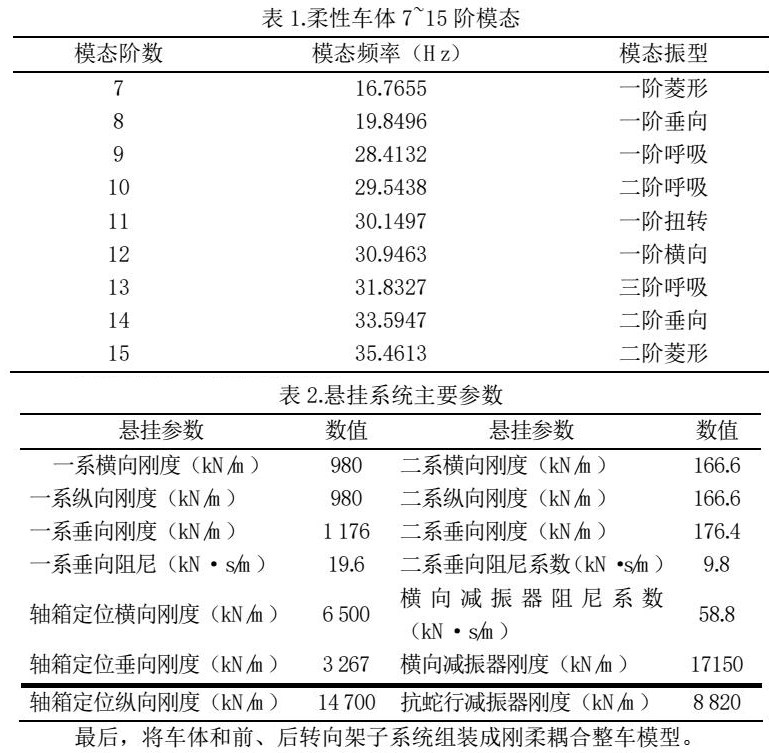
1.车体模态分析
用Solidworks软件建立了车体三维模型,然后将车体模型以中性文件的格式保存并导入ANSYS中,并赋予材料属性,生成网格,对其进行自由状态下的模态分析。对车体模态进行分析时取前20 阶模态,不包括前6阶(前6阶模态为刚体模态,不予考虑,可将其略去)。表1为车体前7~15阶模态计算结果。
2.刚柔耦合车辆模型的建立
在建立刚柔耦合模型时,将柔性车体与刚性转向架连接时,必须在ANSYS中建立有限元车体模型的外连点,导入ADAMS/Rail后,在外连点上建立Interface part,用于与转向架建立通讯器连接,生成车体子系统。然后建立转向架模板并生成前、后转向架子系统。柔性车体模板和转向架模板如图2、图3所示。用于建立模型的悬挂系统主要参数如表2所示。
最后,将车体和前、后转向架子系统组装成刚柔耦合整车模型。
3.动力学仿真分析
对刚柔耦合车辆模型进行动力学仿真分析,将仿真出的各项动力学性能指标与刚体车辆模型仿真出的进行对比,进而得出结论。在进行动力学仿真分析时,采用直线轨道,轨道不平顺激励采用德国低干扰谱。
3.1运动稳定性分析
列车在某一速度范围内运行,车体、转向架构架、轮对的蛇行运动各振型的振幅,随着时间的延续其幅值会不断的衰减,而当列车运行速度超过某一临界数值时,车辆将产生一种不稳定的蛇行运动,其表现形式为振幅会随着时间的延续而不断扩大,不会衰减,这种情况即为失稳。因此,将过渡到不稳定运动时的速度称为车辆的临界速度。
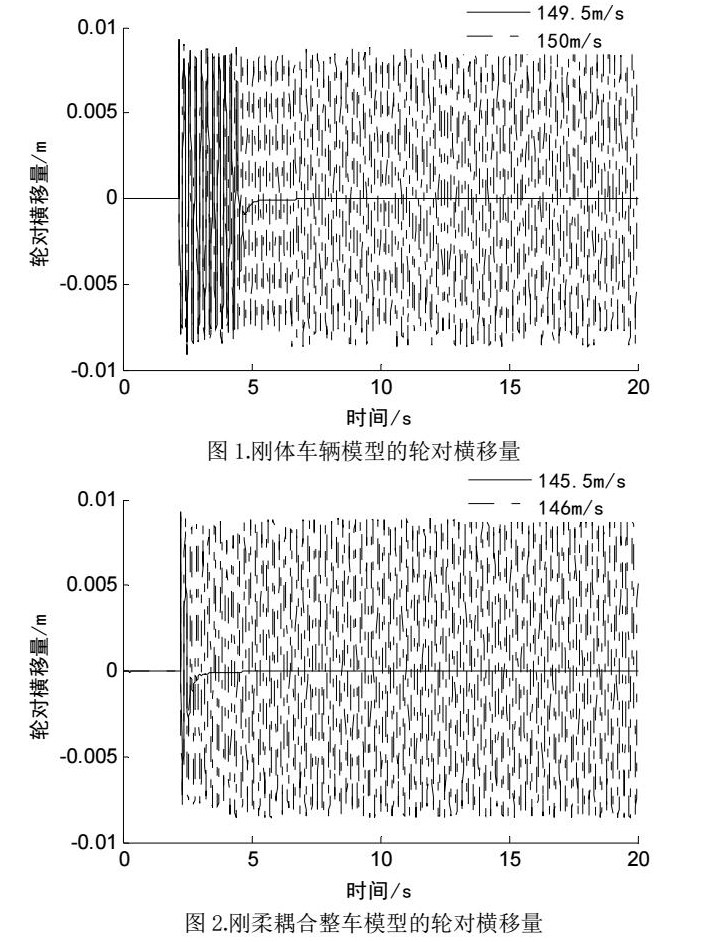
在进行铁道车辆运动稳定性分析时,最直接的评价指标是列车的临界速度。本文利用ADAMS/Rail分别计算出刚体车辆模型和柔性体车辆模型的临界速度。首先在一段理想的直线轨道上加一个横向激励,让车辆以不同的速度通过,观察轮对横移量是否收敛,最终得出临界速度。仿真曲线如图1~2所示。
由图1和图2可以看出,刚性体车辆模型的临界速度大约为538.2 km/h,柔性车体模型的临界速度为523.8 km/h,由此可得出柔性车体的临界速度要低于刚体模型,即比刚体模型易发生失稳。之所以会出现这种现象,是由于实际车体结构的弹性变形使得车辆在高速运行中横向运动的收敛性变差所致。
3.2运行平稳性分析
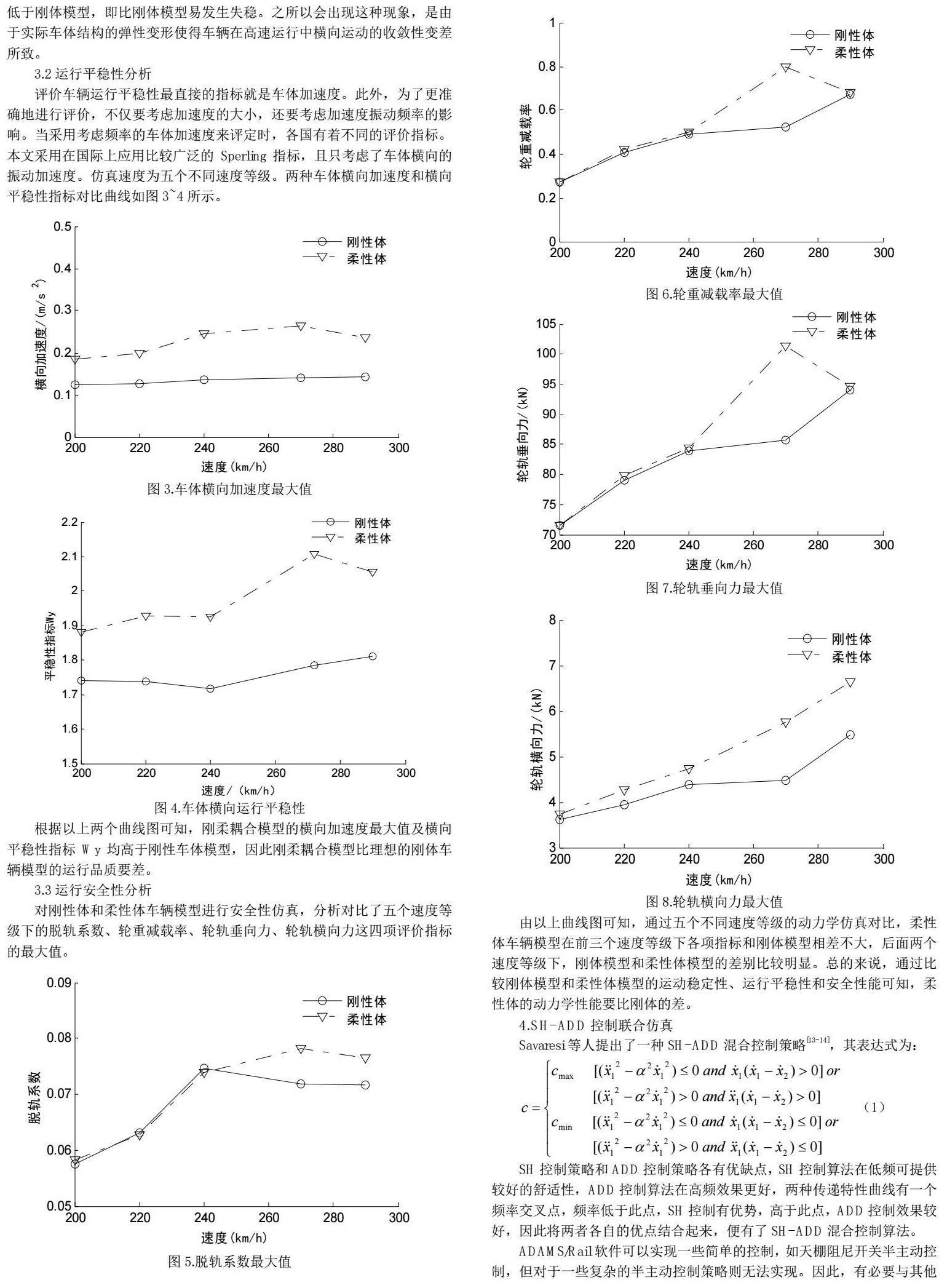
评价车辆运行平稳性最直接的指标就是车体加速度。此外,为了更准确地进行评价,不仅要考虑加速度的大小,还要考虑加速度振动频率的影响。当采用考虑频率的车体加速度来评定时,各国有着不同的评价指标。本文采用在国际上应用比较广泛的Sperling指标,且只考虑了车体横向的振动加速度。仿真速度为五个不同速度等级。两种车体横向加速度和横向平稳性指标对比曲线如图3~4所示。
根据以上两个曲线图可知,刚柔耦合模型的横向加速度最大值及横向平稳性指标Wy均高于刚性车体模型,因此刚柔耦合模型比理想的刚体车辆模型的运行品质要差。
3.3运行安全性分析
对刚性体和柔性体车辆模型进行安全性仿真,分析对比了五个速度等级下的脱轨系数、轮重减载率、轮轨垂向力、轮轨横向力这四项评价指标的最大值。
由以上曲线图可知,通过五个不同速度等级的动力学仿真对比,柔性体车辆模型在前三个速度等级下各项指标和刚体模型相差不大,后面两个速度等级下,刚体模型和柔性体模型的差别比较明显。总的来说,通过比较刚体模型和柔性体模型的运动稳定性、运行平稳性和安全性能可知,柔性体的动力学性能要比刚体的差。
4.SH-ADD控制联合仿真
Savaresi等人提出了一种SH-ADD混合控制策略[13-14],其表达式为:
SH控制策略和ADD控制策略各有优缺点,SH控制算法在低频可提供较好的舒适性,ADD控制算法在高频效果更好,两种传递特性曲线有一个频率交叉点,频率低于此点,SH控制有优势,高于此点,ADD控制效果较好,因此将两者各自的优点结合起来,便有了SH-ADD混合控制算法。
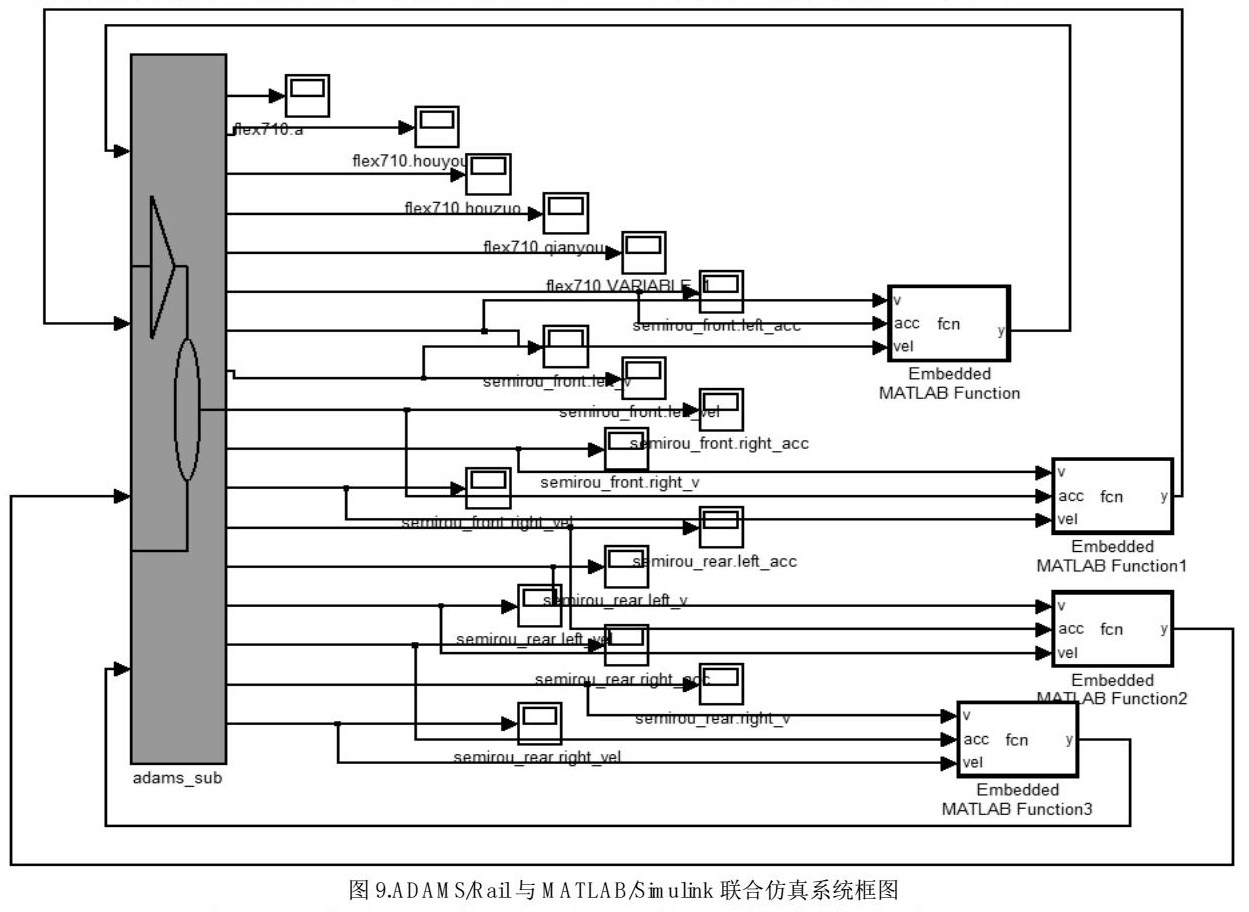
ADAMS/Rail软件可以实现一些简单的控制,如天棚阻尼开关半主动控制,但对于一些复杂的半主动控制策略则无法实现。因此,有必要与其他控制程序联合起来进行计算。ADAMS/Rail与其他控制程序的联合控制是在ADAMS/Rail中建立多体动力学模型,然后由ADAMS/Rail输出描述系统方程的有关参数,进而在其他控制程序中读入ADAMS/Rail输出的信息并建立起控制方案。在运行计算过程中ADAMS/Rail与其他控制程序进行数据交换,ADAMS/Rail负责求解系统的方程,其他控制程序求解控制方程,最后共同完成整个控制过程的计算。其他控制程序可以是MATLAB、Easy5或FUM。 本文采用MATLAB与ADAMS/Rail进行联合仿真计算。通过在ADAMS/Rail中加载Controls模块,用状态变量指定好控制的输入输出,最后将模型导入MATLAB/Simulink中,进而建立控制方案,进行联合仿真。如图所示。仿真时间为15 s,步长为0.005。
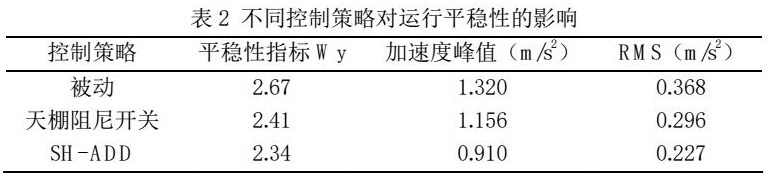
仿真采用了三种不同的控制方案,分别是被动控制、天棚阻尼开关控制以及SH-ADD控制,其中的SH-ADD控制中需要确定转换系数α,根据文献[15]得出的结论,本文将α的值定为10.8。然后根据仿真出的数据得出三种控制策略下的平稳性指标Wy、加速度峰值和RMS,如表所示。
通过表中的数据对比,可以得出天棚阻尼开关控制要优于被动控制,而SH-ADD控制效果比天棚阻尼开关半主动控制要好。与被动控制相比,天棚阻尼开关半主动控制可以降低横向平稳性指标9.7 %左右,而SH-ADD控制可以降低12.36 %,加速度最大值可以降低31.06 %,加速度均方根值降低达38.3 %,控制效果较为明显。
5.结论
①在同样的工况条件下,将车辆模型中的刚性车体处理成柔性体并进行运动稳定性、运行平稳性和安全性仿真分析对比,结果显示:柔性体车辆模型的临界速度要低,运行平稳性比刚体车辆模型的差,脱轨系数、轮重减载率、轮轨垂向力和轮轴横向力的最大值比刚性车体的有所增加。因此,柔性体车辆模型的安全性能比刚体车辆模型的要差。这也证明了列车要加装主动、半主动控制系统的必要性。如今,列车速度不断提高,车体越来越轻,为使仿真分析更加准确,将铁道车辆中的一些长大部件考虑成弹性体并与其他部件组装在一起而组成刚柔耦合的动力学分析模型是今后动力学分析的方向。
②以刚柔耦合模型为研究对象,采用SH-ADD控制策略对模型进行联合仿真分析,结果表明此控制策略明显优于其他两种控制。 SH-ADD控制可以降低运行平稳性指标12.36 %,加速度最大值可以降低31.06 %,加速度均方根值降低达38.3 %,控制效果比较明显,可以很好的提高列车横向平稳性能。
6.参考文献
[1] 廖英英,刘金喜,刘永强等. 半主动控制与时滞对高速铁道车辆平稳性、稳定性及安全性的影响[J]. 振动与冲击,2011,30(6):53-57.
[2] 王凯平,黎剑锋,向贤虎等. 高速动车组半主动悬挂系统动力学性能仿真分析[J]. 机车电传动,2012,35(3):11-14.
[3] 刘永强. 基于磁流变阻尼器的高速动车组半主动控制与时滞分析[D]. 北京交通大学,2011.
[4] 黎剑锋,王凯平,向贤虎等. 高速动车组半主动悬挂系统的研究[J]. 铁道学报.2013,(7):21-25.
[5] 周洪涛,朱红霞. 高速动车组半主动悬挂系统几种控制策略对比仿真分析[J]. 铁道机车车辆.2011,(1):4-9.
[6] 刘永强,杨绍普,廖英英等. 基于MR阻尼器的高速动车组悬挂系统半主动控制仿真[J]. 振动与冲击.2010, 29(12):97-101,240-241.
[7] 姜雪娇,齐双强,齐双峰等. 基于刚柔耦合模型的C80B 型敞车动力学性能研究[J]. 起重运输机械,2012,25(5):25-28.
[8] 李笑 ,卜继玲, 黄运华等.SIMPACK中的柔性体动力学仿真分析研究[J]. 信息技术,2010,39(1):91-94.
[9] 李奇,吴定俊,邵长宇.考虑车体柔性的车桥耦合系统建模与分析方法[J]. 振动工程学报,2011,24 (1):41-47.
[10] 刘楠. 基于柔性车体的平车动力学性能仿真分析[D]. 成都:西南交通大学,2013.
[11] J Zhou ,R Goodall ,L Ren and so on. Influences of car body vertical flexibility on ridequality of passenger railway vehicles[J]. Rail and Rapid Transit,2009,223(5):461-471.
[12] 宋雨,陈卫东,宋港. 刚柔耦合列车半主动悬挂参数自调整模糊控制[J].噪声与振动控制. 2012, 32(5):92-96.
[13] Savaresi,Sand Spelta,C. Mixed sky-hook and ADD: Approaching the filtering limits of a semi-active suspension[J]. ASME Transactions: Journal of Dynamic Systems, Measurement and Control, 129(4): 382-392.
[14] Savaresi,Sand Spelta,C. A single sensor control strategy for semi-active suspension[J]. IEEE Transaction on Control System Technology, 17(1):143-152.

 京公网安备 11011302003690号
京公网安备 11011302003690号


