



- 收藏
- 加入书签

仿生机械蜘蛛结构设计
 打开文本图片集
打开文本图片集
摘要:项目以蜘蛛为雏形,从机器人的构型,步态原理以及规划直线行走和定点转弯步态三方面进行研究本团队产品主要以机械为基础,通过电机为驱动系统提供动能,由电机带动齿轮传动再由齿轮带动连杆进行运动以此来实现蜘蛛的四足运动。通过实现足端与地面之间的柔顺控制使得本产品能够在粗糙地形下行走。具有一定的实用价值和研究意义。
关键词:仿生;蜘蛛;定点转弯
1研究背景
仿生机械蜘蛛通过对蜘蛛的体态、行走姿态等进行分析,从而设计的一款能够适应复杂地形的仿生机器人。面对地形不规则和崎岖不平的路况,轮式机器人和履带式机器人的应用受到了许多限制。以往的的研究表明轮式移动方式在平坦的地形上行驶时,具有相当的优势运动速度迅速、平稳,结构和控制也较简单。但在不平地面上行驶时,能耗将大大增加,而在松软的地面或严重崎岖不平的地势上,车轮的作用也将严重丧失移动的效率。为了改善轮子对松软地面和不平地面的适应能力,履带式移动方式应用而生但履带式机器人在不平的地面上的机动性仍然很差,行驶时机身晃动严重。与轮式、履带式移动机器人相比,在崎岖不平的路面仿生蜘蛛机器人具有独特优越性能。在自然界中,多足动物和昆虫均通过腿足的连续摆动、相互协调实现从一个位置移动到另一个位置,这种多足协同运动的实现形式即为步态。四足机器人结合其腿部机构的特点、布局形式、安装特点,可分为两种行进方式,即:纵向行进的蜘蛛型和横向行进的螃蟹型。而在移动过程中,蜘蛛的步态形式根据地形环境变化而变化,通过对蜘蛛观察可以发现,其在正常移动过程中采用的是四足 Z 型步态形式,速度快,效率高,非常适合在平坦和较平坦的地面移动。本文以常规步态中的四足步态为研究对象,进行设计。
2行走机构设计
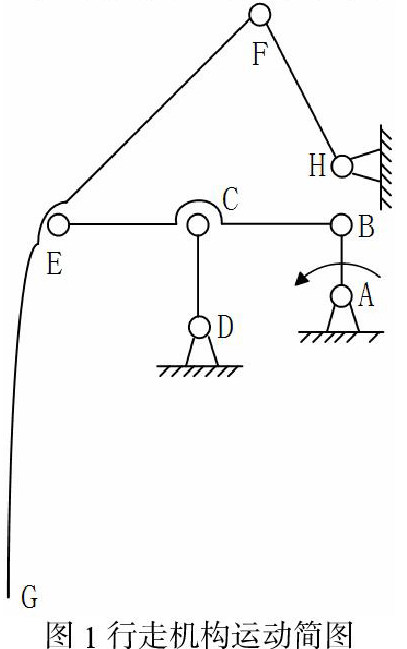
连杆机构中,当原动件的运动规律不变,改变各构件的相对长度即可使从动件得到不同的运动规律。本装置基于连杆机构设计出仿生机械蜘蛛的行走机构。如图1所示为行走机构运动简图,该机构是一个平面多杆机构,由一个五杆机构组成,所有购件通过转动副连接,压强小,承载能力大。铰链A、D和G为机架,固定在蜘蛛身体上,杆AB是整个机构的原动件,通过齿轮机构与电动机相连接,AB杆做整周回转运动,带动整个机构工作。其中G点为该行走足的落足点,在曲柄 AB 的圆周运动过程中,落足点 G 也将做周期性的运动,从而实现蜘蛛的单足行走运动。
3整体机构设计
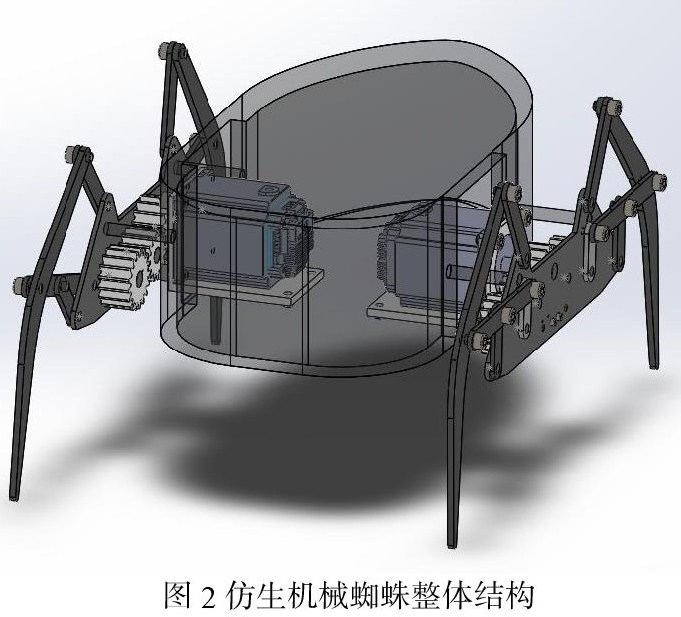
如图2所示,仿生机械蜘蛛由躯干和腿部等两部分组成,在结构设计中让同侧行走足的曲柄 AB 在运动过程中具有相同的相位,另一侧行走足的曲柄AB 在运动中具有相同的相位;同时,左右两侧行走组的曲柄AB在运动中的相位差分别相等。这种相位设计方式可以保证四足机器人在行走过程中,当一个对角位置的两个行走足处于触地支撑阶段时,另一个对角位置的两个行走足处于迈步抬腿阶段,从而能使机器人模仿四足动物的行走运动。
4转弯步态设计
仿生机械蜘蛛不只是单纯进行直线行进,在很多情况下,还需要进行转弯操作,常用的转弯方式有两种:一种是在前进过程中转弯,另一种是定点转弯,前者特点为动作时间较长,灵活性差;后者灵活性好,响应速度快。 本机器人采用定点转弯的方式来实现转向动作 ,在转弯过程中通过左右两侧电机的差速转动实现,结构简单,控制容易。
5应用领域
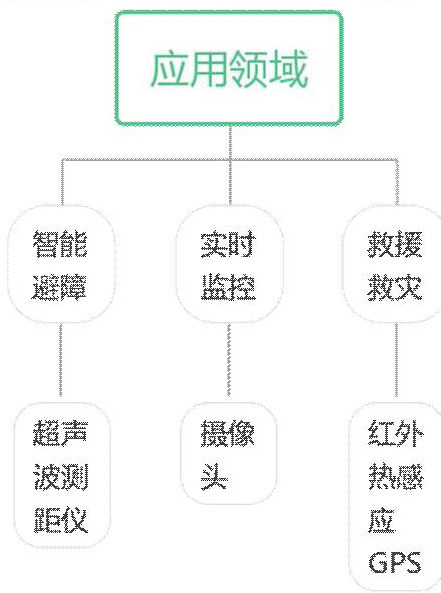
仿生机械蜘蛛可以广泛应用于军事、救援、探测以及娱乐等多领域中,其机械结构和电动部分协同完成蜘蛛的行走运动和转弯运动。搭配超声波测距模块可以测量前方障碍距离,然后通过控制舵机来改变行进的方向,进而完成避障动作,蜘蛛机器人可以同时对多个方向障碍进行检测。还可以在各种恶劣的环境下进行实时监控,完成图像采集、发送、接收、传输及显示,进而实现实时监控的功能。亦可以用于恶劣环境下的救援救灾工作,通过红外热感应发现需要救援人员然后再通过GPS反馈信号。
6结语
本文以蜘蛛为雏形,设计了一款仿生机械蜘蛛模型,进行其结构、功能以及应用领域进行分析,结构简单合理,能较好的完成行走、转弯、避障等功能,具有一定的实用价值和应用前景。
参考文献
[1]王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015(13):27-44.
[2]麦杨杰,袁泓博,郭建,等. 仿生四足机器人的设计与运动步态分析[J]. 机械制造,2019,57(12):52-55,114.
[3]李鹏辉. 基于多连杆的机器人步行机构运动特性分析[J]. 武汉理工大学学报(交通科学与工程版),2012,36(4):
通讯作者:赵月(1989——)、女、汉族、辽宁锦州人、讲师、硕士研究生、研究方向:数控技术

 京公网安备 11011302003690号
京公网安备 11011302003690号


