



- 收藏
- 加入书签

基于“1+X”证书制度的工业机器人专业培养模式创新研究
 打开文本图片集
打开文本图片集
摘要:本文在探索基于“课证融通”的探究式教学法过程中,将“1+X”职业技能等级标准考核内容与“课堂相融”,使考核中的各项技能点具象化、实体化、可操作化。培养学生从事工业机器人自动化类岗位所必备的知识和基本技能,初步形成处理实际问题的能力、分析问题和解决问题的能力。
关键词:工业机器人;1+X证书;专业培养模式;课证融通
高职教育方向的工业机器人“1+X“职业技能等级证书主要面向生产线现场(离线)编程、运行(包括后期)维护、安装调试等岗位,本文通过研究期望完成:将1+X证书制度与专业建设、课程思政建设、教师队伍建设等紧密结合,进一步推进“1”和“X”的无缝对接,提升职业教育质量和学生考证就业能力,助力“1+X”证书制度深化教学体制创新改革新模式,将职业教育的课程体系与实践实操技能进行深度融合。
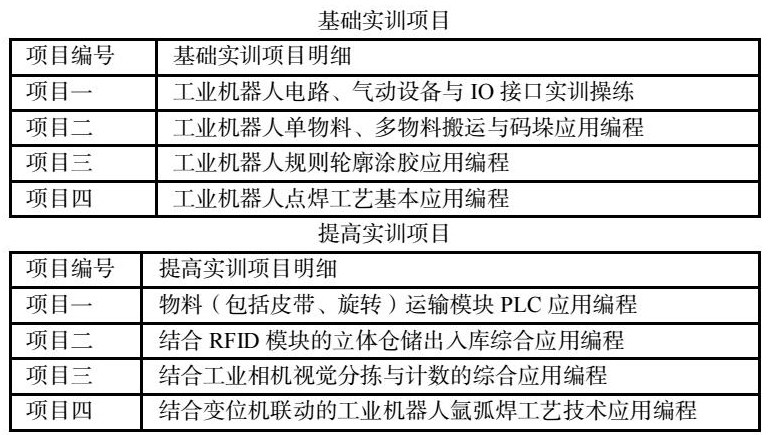
一、通过创新平台构建实训项目
在教学过程中参考《工业机器人应用编程》条目,以职业技能等级标准为准绳,将考点渗透于课程安排与实训演练过程中,实现大纲教学内容与1+X考证之间的无缝衔接。目前工业机器人相关课程形成的典型场景应用往往有以下几种类型:多物料码垛、多物料搬运、产品分拣、焊接(包括点焊与氩弧焊类型)、工件打磨、轨迹(包括规则与不规则形状类型)、复杂装配等。将上述场景适当提炼修改后可以形成实训课中的:码垛搬运模块、变位机模块、涂胶模块、仓储出入库模块、执行工具换接模块等进行针对性的综合训练。针对1+X考证内容,形成侧重点不同的两级实训项目:基础实训项目与提高实训项目。其中前者重点在于考察学生对电气连接、机械与气动液压单元安装、变频器参数设定和PLC连线与基础梯形图编程调试的掌握程度。而后者则偏重于考察学生对多模块之间的信息交互、协同运行与PLC综合编程的理解深度,并要求学生对机器视觉有一定的了解,对自动化生产流水线的运行机制有全局性的掌握。
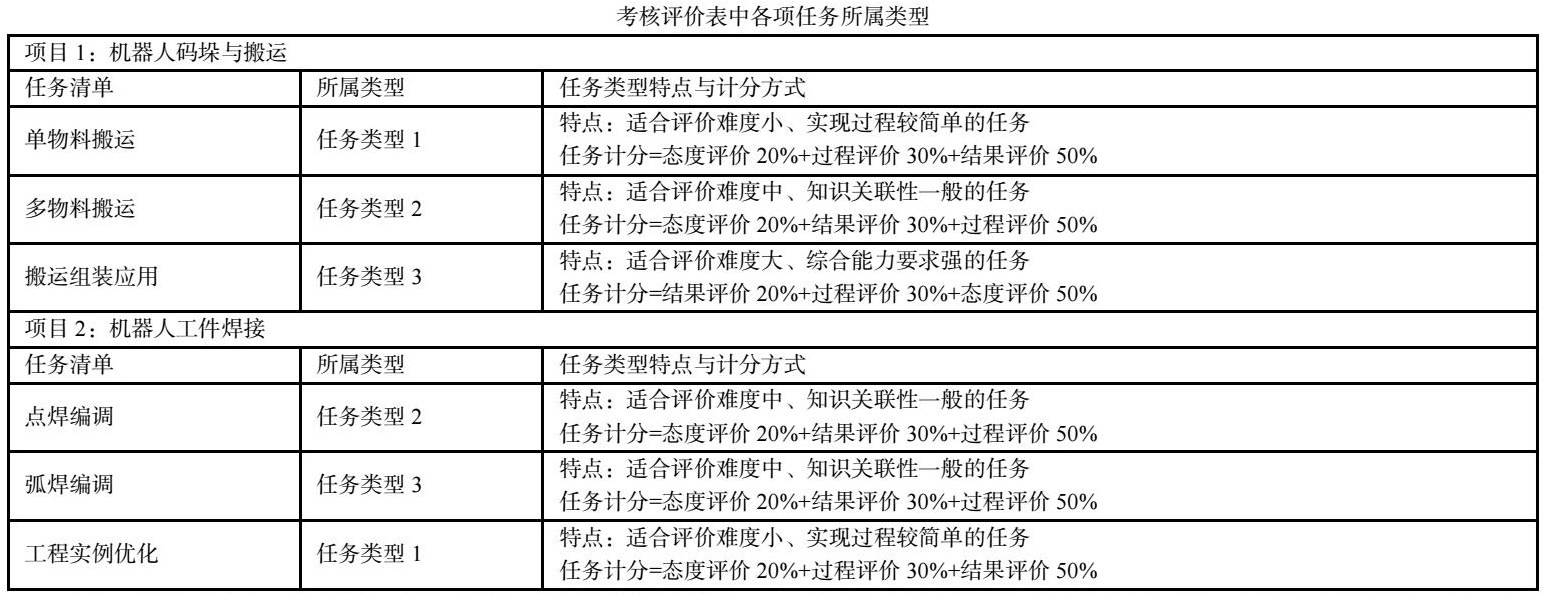
二、对标“技能等级、任务类型”,评价教学成效
融入《工业机器人应用编程职业技能等级标准》考核要求,确定了“懂原理、精编程、会装调、能考证”的知识结构与能力体系。构建以《工业机器人应用编程职业技能等级标准》考核方案为主线的教学评价体系,按任务内容和特点划分为易、中、难,三档任务类型,三种任务类型的考核侧重点均有差别,评价结果更好体现任务核心要素的掌握度。根据每个任务特点,使每项任务与三种任务类型一一对应,将获得的指标评分加权后汇总并形成小组及个人成绩,各任务加权后大于70分为合格。以某教学设计中的考核项目为例:
另外,在结果评定上,以“精编会调”为准绳,根据操作工单评分标准,对课中技能训练任务完成情况和操作规范性等要素实施校企生三方评价。在课堂实操结果评价中,教师把关任务流畅性、步骤准确性。企业导师从任务的效率角度、实际可行性角度、稳定性角度等予以评估。
三、结束语:
为了适应基于“1+X”证书制度的工业机器人专业培养模式,从教学编排角度上,要不断提升课程教学的实践性与创新性。在实操教学中,尽可能使实操内容和当今工业机器人领域的实际发展情况相吻合,以此让学生能及时接触到最新工业机器人知识。努力探寻工业机器人现场编程(1+X考证方向)与各专业课程、基础课程的契合点,积极应用交叉教学模式,以此将各课程知识进行有机串联。结合实际的行业岗位需求来制定工业机器人现场编程课程的整体教学方案,重视对学生们综合能力培养。同时,也应对现有的评价体系进行修正和完善,运用学业成就测试、个别谈话、成长资料审阅、大数据分析等手段了解学生在责任担当、实践创新等方面的情况,更加关注学生学习过程中的变化,及时纠正不良态度、行为、习惯等。
课题来源:浙江省高等教育学会2021年度高等教育研究课题
参考文献:
[1]蒋庆斌.机械工业出版社.《工业机器人现场编程》,2010:15-32
[2]柳青峰,陈安平. 任务驱动下的自主学习能力培养.高等教育研究学报,2013:35-82
[3]孔祥东,王益群。控制工程基础(第三版),机械工业出版社,2007:45-78
[4]赵辉等. “项目导向案例驱动”的软件工程教学模式.计算机教育,2012(10):76-88
作者简介:舒凯跃 (1985-),男,汉族,浙江舟山人,硕士,讲师,研究方向:工业自动化。

 京公网安备 11011302003690号
京公网安备 11011302003690号


