



- 收藏
- 加入书签

水产品高效自清洁生产线槽轮研究
 打开文本图片集
打开文本图片集
[摘要]通过观察实际水产品生产,针对传统的人工存在效率低下,自动化程度不高的弊端,设计了高效自清洁生产线装置。而槽轮机构是高效自清洁生产线装置的核心机构,基于Pro/E软件的运动仿真功能,通过运动图像对比得出槽轮的槽数越多,角加速度和角速度越小的结论。
[关键词]Pro/E;槽轮机构;水产品;自清洁生产线
中图分类号:G356.6
Abstract:By observing the actual production of aquatic products, a high-efficiency self-cleaning production line device was designed in view of the disadvantages of low efficiency and low degree of automation in traditional manual labor. The sheave mechanism is the core mechanism of the high-efficiency self-cleaning production line device. Based on the motion simulation function of the Pro/E software, it is concluded that the more the number of grooves in the sheave, the smaller the angular acceleration and angular velocity through the comparison of motion images.
Key words:Pro/E; sheave mechanism; aquatic products; self-cleaning production line
由于槽轮机构存在传统的传动平稳[1],可靠等优点,所以在实际生产当中有许多应用。针对水产品自清洁生产线,人们设计了以槽轮为基础的翻转式工作台[2],而槽轮机构是该翻转式工作台实现自动清理的核心装置,但是他们的研究大部分只是从二维的角度出发,虽然也能较好的展现生产线中的槽轮机构,但是缺乏三维运动仿真数据的支撑,由于Pro/E具有严格的数据定义[3],不仅可以通过三维建模将槽轮机构直观展示,还能将角速度和角加速度量化到具体数值进行分析。同时也给不同槽数的槽轮的运动特性的异同给出数据上的支持,可以更为客观地研究槽轮槽数和槽轮角速度和角加速度之间的运动关系。
1. 高效自清洁生产线装置的介绍
1.1高效自清洁生产线的工作原理:
通过给与槽轮结构中的拨盘电机动力使其转动,从而带动工作台里面的中心轴的转动,同时工作台里面的高压水枪工作,实行清理喷射,之后水产品顺着水产品下落台滑落下来,清理后的固态杂质通过水产品下落台中的滤孔过渡到固态垃圾清理刷中,通过给与固态垃圾清理刷中间轴电机动力使其转动将固态杂质排出,最后清理后的水产品在水产品传送带上进行运输,清理产生的废水通过外壳下面的排污口统一排出,进行集中处理。之后槽轮重复运动,实现装置的反复自动清理流程。
1.2高效自清洁生产线装置的优势
1)传统的人工模式是工人在工作台上直接进行手工清理,这样做从生产效率,工人时间成本,企业的收益效率等方面来说,都是耗时耗力的,现在通过槽轮结构的传动运动带动工作台轴的传动,并且工作台上的高压水枪在工作台转动时实行定时喷射,这样不仅清理效率高,成本也大大降低,效率成倍提升。
2)与传统的固液杂质一起排放到环境的模式不同,这里通过水产品下落台过滤出固态杂质,通过外壳的排污口排出液态废水,实现固液分离排放,同时,收集后的固态杂质如果处理得当,还可以通过化学的手段实行二次利用,实现资源的可持续发展。
3)槽轮结构中拨盘轴的传动,固态垃圾清理刷的轴传动,水产品传送带的传动,都是需要电机去统一供给,这时候可以通过STM32F103,设置合适的控制模块以及检测模块[4]以及PID闭环控制[5],便可以非常精确的控制得到我们想要的速度,实现装置整体的智能化。
2.槽轮的Pro/E建模
拨盘孔和槽轮孔的中心距为L1,拨盘孔和拨销中心距为L2,槽轮孔和拨销的中心距为L3。要想满足3槽槽轮的啮合关系,L1,L2,L3就必须要满足直角三角形30度的边长关系,即取L1=94mm,L2=81mm,L3=47mm。要想满足4槽槽轮的啮合关系,L1,L2,L3就必须要满足直角三角形45度的边长关系,即取L1=100mm,L2=71mm,L3=71mm。要想满足6槽槽轮的啮合关系,L1,L2,L3就必须要满足直角三角形30度的边长关系,即取L1=130mm,L2=65mm,L3=113mm。然后分别在Pro/E中进行建模。
3.槽轮机构的运动仿真和结果分析
在Pro/E中的下拉菜单中选取机构,进入仿真页面,以拨盘轴运动作为主运动,槽轮轴运动作为从运动。点击电机设置角速度和角加速度参数,机构分析后点击测量生成结果集,导出运动图像,进行主从运动的分析。
3.1主动拨轮的运动分析
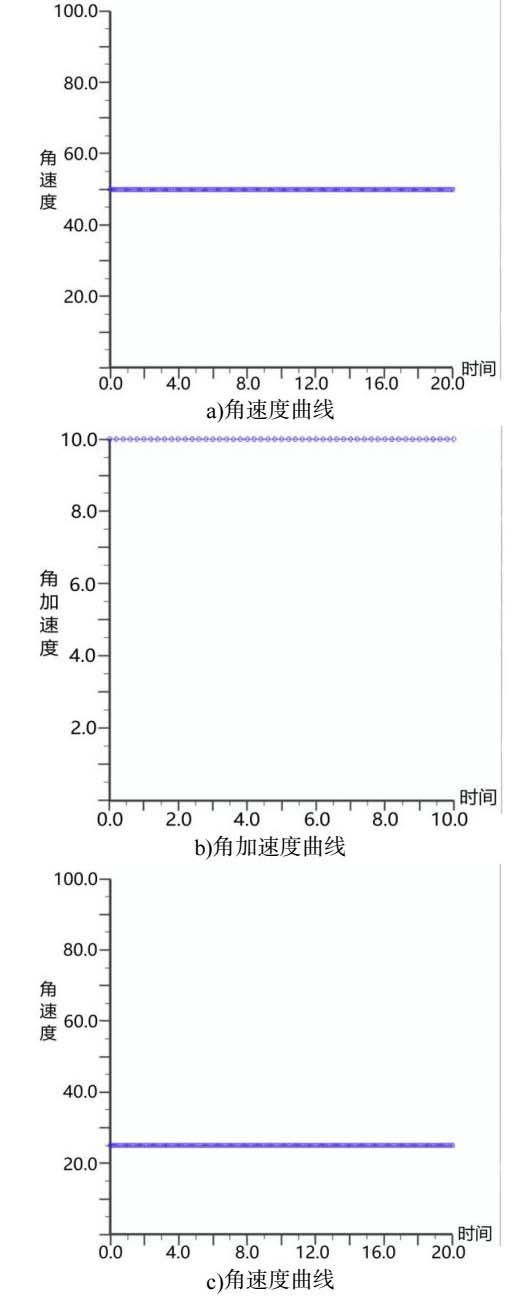
拨盘轴的角速度和角加速度随着时间的变化曲线分别如图1(a)和图1(b),如图1(c)和图1(d)所示,其中在20s运动时间内取两组,分别以恒定的角速度25deg/sec和50deg/sec进行运动,在10s运行时间内取两组,分别以恒定的角加速度10deg/sec^2和20deg/sec^2进行运动。
3.2从动槽轮的运动分析
1)当主动轮角速度为50deg/sec时,从动轮的角速度图像分析
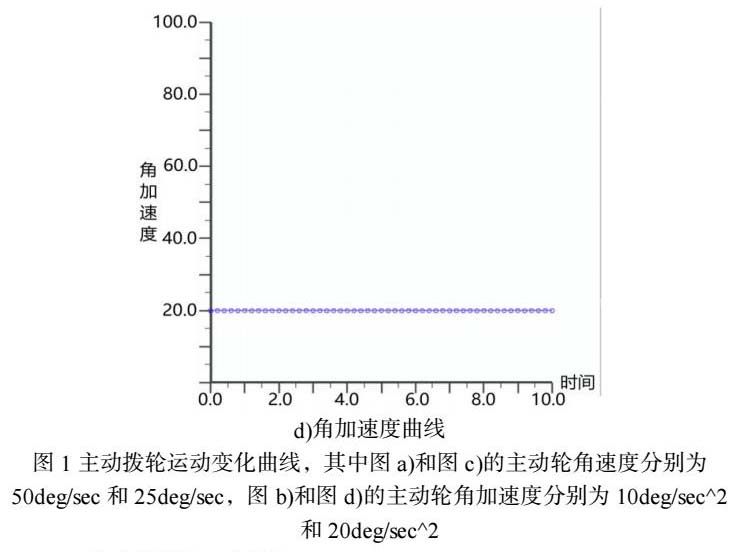
3槽,4槽,6槽从动轮的角速度分别如图2(a)图2(b)图2(c)所示,由于主动拨盘和从动槽轮存在转向相反[6]的特性,所以图像值均为负值,三种槽型的运动周期大致均为6.5s,且在一个运动周期内,3槽和6槽的运动趋势一致,都是经历了3个阶段,3槽先递减至-300deg/sec,之后缓缓递增至0deg/sec后趋于平缓,6槽则是递减至-50deg/sec后缓慢递增至0deg/sec。4槽槽轮的运动趋势较为奇特,分两大阶段,第一阶段则为3个运动过程,图像递减到-120deg/sec后又较快递增至0deg/sec,第二阶段则为5个运动过程,先递减至-120deg/sec后较快递增至-10deg/sec,之后在递减至-105deg/sec后缓慢递增至0deg/sec。通过对比一个周期内的图像得知,6槽的圆滑度和稳定性是三条曲线里面最好的,4槽图像则是在第二个运动阶段出现了两个波谷值,其运动趋势比3槽和6槽更为复杂。此外对三种槽数的角速度最大值进行分析,3槽槽轮的角速度最大值为300deg/sec,4槽槽轮的角速度最大值为120deg/sec,6槽槽轮的角速度最大值为50deg/sec,对比可见3槽槽轮是4槽的2.5倍,是6槽的6.0倍,可见随着槽轮槽数的增加,角速度值变小,且变小的倍率随着槽轮的槽数的增加而增加,并且增长没有固定的比例规律。
当主动轮角速度减少一半,即25deg/sec时,从动轮的角速度图像分析
3槽,4槽,6槽从动轮的角速度分别如图2(d)图2(e)图2(f)所示,由于槽轮的运动相反的特性,所以所有图像依旧是负值。通过图像可以发现3槽的图像基本呈现规律性,大体上有三个阶段,首先角速度曲折式递减至-160deg/sec,之后再曲折式递增至0deg/sec,最后稳定在0deg/sec的状态。4槽和6槽的图像走线与3槽基本上一致,但是与之不同的是,4槽槽轮的角速度的波谷值为-62deg/sec,6槽槽轮的角速度的波谷值为-25deg/sec。由于负号表示方向,在判断大小时,可以发现角速度的大小在槽数由3槽向6槽转变时逐渐变小。并且再次仔细观察图像,发现4槽槽轮在波谷值附近的点明显多于3槽槽轮,6槽槽轮波谷值附近的点明显多于4槽槽轮。可见随着槽轮槽数的增加,单位时间内所采集到的数据值也随之增多。
当槽数相同时,对比探究角速度为50deg/sec和25deg/sec的从动轮运动是否呈现规律性,并且该观察槽轮间的运动曲线是否存在差异
如图2(a)与图2(d)和图2(b)与图2(e)和图2(c)与图2(f)所示,对比图像的最大值可发现当槽数均为3时,主动轮角速度减半,从动轮的角速度则由295deg/sec减小至160deg/sec,它们之间相差1.8倍;当槽数均为4时,主动轮角速度减半,从动轮的角速度则由120deg/sec减小至62deg/sec,它们之间相差1.9倍;当槽数均为6时,主动轮角速度减半,从动轮的角速度则由50deg/sec减小至25deg/sec,它们之间相差2.0倍;同样,我们再来对比一下图像的周期大小,当槽数为3时,角速度减半,函数图像的周期由原来的6.5s变为14.25s;当槽数为4时,角速度减半,函数图像的周期由原来的6.6s变为14.2s;当槽数为6时,角速度减半,函数图像的周期由原来的7.6s变为14.1s。周期基本上也呈现2倍增长的趋势。综合角速度大小变化和周期的变化规律,可得出当槽数一定时,主动轮的角速度减半,周期基本上增加至原来的2倍,从动轮的角速度基本也会呈规律性的减半,且减少的比率随着槽轮的槽数增加,越接近于50%。纵观3槽和4槽和6槽的图像,发现当改变角速度时,3槽和6槽的曲线走向基本保持一致,没有特别大的差异。但是4槽槽轮的图像走向差异较大,在一个运动周期内,角速度为50deg/sec的4槽槽轮比角速度为25deg/sec的4槽槽轮多出两个运动表现,即图像上出现第二个波谷值。
4)当主动轮的角加速为20deg/sec^2,从动轮的角加速度图像分析
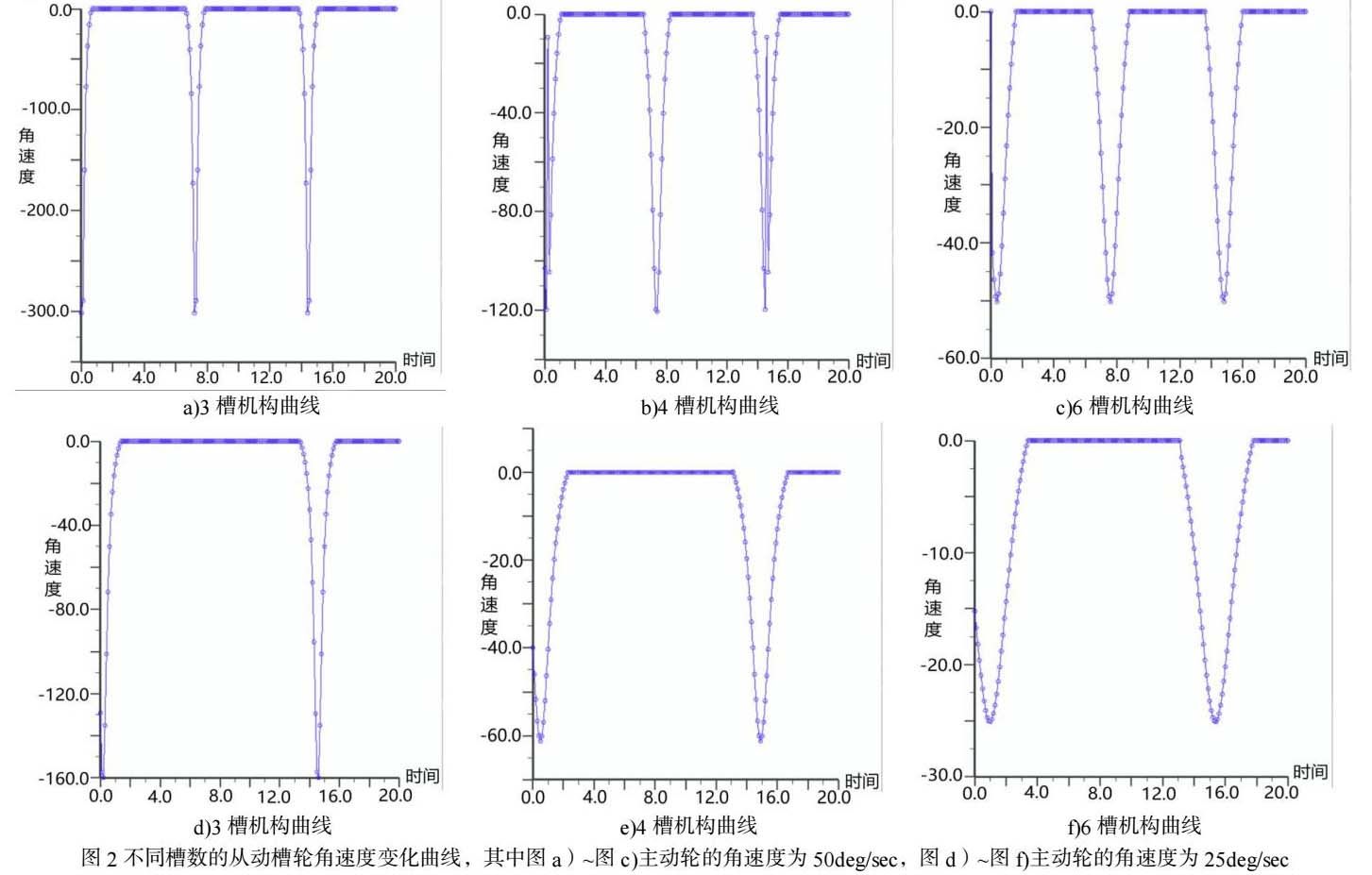
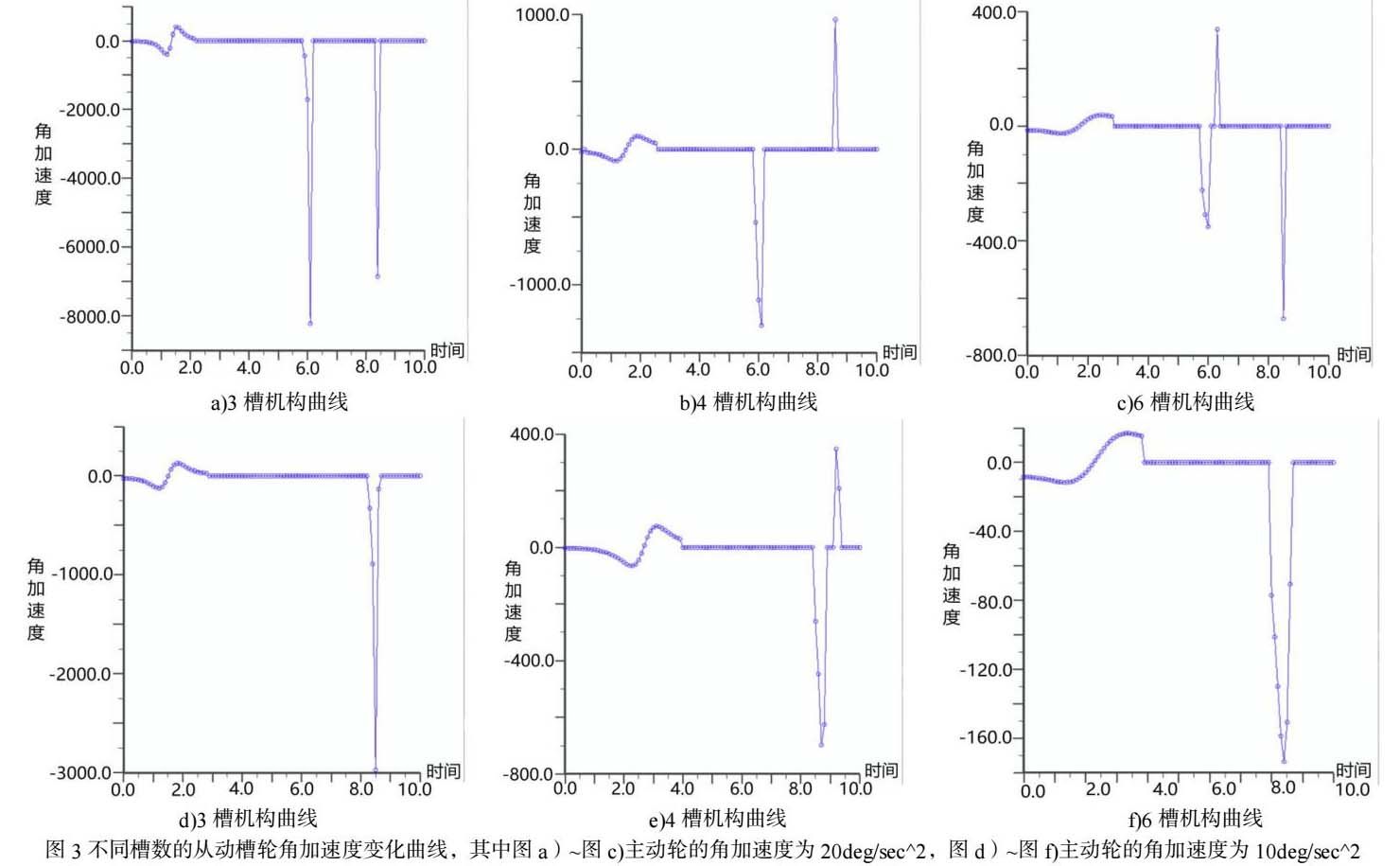
3槽,4槽,6槽从动轮的角加速度分别如图3(a)图3(b)图3(c)所示,在运行的10s时间内,从动轮的波动是非常大的,并且随着槽轮槽数的增加,波动幅值开始慢慢减小。分析3槽槽轮,可见在前2s内,图像先递减至-500deg/sec^2后缓慢上升至500deg/sec^2,然后回到0deg/sec^2,保持了大约3.75s的稳定状态后,在5.75s处曲线开始下滑式递减至-8250deg/sec^2,由于函数直接跨越了8250deg/sec^2,所以此时函数的递减斜率大,速度快。并且此时曲线只用了0.2s就实现了-8250deg/sec^2到0deg/sec^2的递增。在经历了2s的平稳期后,又持续了将近0.15s的递减递增过程,但此时递减的波谷值大小明显低于前一次,为-6750deg/sec^2。紧接着再来看4槽槽轮,通过图像对比可以发现,在规定的运动时间10s内,4槽槽轮只出现一次波谷,并且波动的幅值大大低于3槽槽轮,可见4槽槽轮的稳定性是高于于3槽槽轮的,在刚开始的2.5s内,4槽槽轮经历了与3槽槽轮运动趋势相近的波动,即图像先递减至-125deg/sec^2,然后在缓慢递增至125deg/sec^2,之后在递减至0deg/sec^2保持平稳。在5.8s到6.2s的时间区间内经历了递减至-1300deg/sec^2后递增至0deg/sec^2的过程,在经历了一段时间的平稳期后,在8.45s时出现了持续0.1s左右的先递增后递减过程,出现了短暂的正值波动,函数图像递增至1000deg/sec^2。在经历了短暂的正值递增后迅速递减至0deg/sec^2。最后再来分析6槽槽轮,在刚开始的2.75s内,函数曲线并没有像3槽槽轮和4槽槽轮那样递增和递减的过程分配的那么均匀,反倒是6槽槽轮在刚开始基本保持平稳状态,之后大部分时间均处于递增的状态,且递增至50deg/sec^2,然后迅速的递减至0deg/sec^2。之后在经历了2.6s的稳定期后,在5.6s出现了先递减至-350deg/sec^2后递增至0deg/sec^2的阶段,持续时间为0.5s,随机立刻出现了短暂的持续时间为0.1s的正值递增递减过程,函数图像先递增至350deg/sec^2,之后递减至0deg/sec^2,而后在8.4s时,经历非常短暂的先递减再递增的过程,持续时间仅0.1s,且递减的幅值远远大于前一次,大约为-675deg/sec^2,约是前一次的2倍。但总体上来说,图像波动比4槽槽轮小,即6槽槽轮机构比4槽槽轮机构稳定。纵观三种槽数的槽轮,3槽槽轮的角加速度大小最大可达到8250deg/sec^2,4槽槽轮的角速度最大可达到1300deg/sec^2,6槽槽轮的角加速度最大可达到675deg/sec^2,可见3槽槽轮是4槽的6.3倍,是6槽槽轮的12.2倍,也从侧面验证了槽轮槽数越多,角加速度越小的正确性,并且减小的倍率随着槽数的增加而增加。
5)当主动轮的角加速度减少一半,即10deg/sec^2,从动轮的角加速度图像分析
3槽,4槽,6槽从动轮的角加速度分别如图3(d)图3(e)图3(f)所示,纵观10s的运行时间,在刚开始的4s内,由于此时拨盘拨销刚与槽轮槽啮合,槽轮角加速度都呈现先递减再递增后递减至0deg/sec^2的趋势,并且其持续时间基本上随着槽轮槽数的增加而增加。经历大致4到5s的平稳状态后,3槽和6槽的运动趋势呈相似性,均为3个阶段,即拨销第二次开始与槽轮啮合时,3槽在8.2s~9.0s的区间内经历了一个波谷值,为-3000deg/sec^2,之后一直保持在0deg/sec^2的平稳状态。6槽在8.2s~8.8s的区间内出现了一个波谷值,其值为-175deg/sec^2,之后一直保持在0deg/sec^2的平稳状态。4槽则与3槽和6槽槽轮不同,4槽槽轮经历了平稳期后,从8.25s开始出现了6个阶段,其不仅仅在这个阶段有波谷值,其值为-700deg/sec^2,中间在经历了0.2s的短暂平稳期后,在9.3s~9.4s的时间区间内出现正值波动和一个波峰值,其值为380deg/sec^2。对比两次的槽轮啮合阶段可发现,由于6槽的角加速度最小,所以6槽槽轮在这两个阶段的持续时间均是最长的,并且其幅值的波动也是最小的。此外从3槽到6槽,可以发现图像的更加趋于圆润,图像的稳定性也有较为明显的提高。
当槽数相同时,对比探究角加速度为20deg/sec^2和10deg/sec^2的从动轮运动是否呈现规律性,并且该观察槽轮间的运动曲线是否存在差异
如图3(a)与图3(d)和图3(b)与图3(e)和图3(c)与图3(f)所示,当槽数均为3时,角加速度为20deg/sec^2的槽轮的角加速度最大值为8250deg/sec^2,角加速度为10deg/sec^2的槽轮的角加速度最大值为3000deg/sec^2,它们之间相差2.75倍。但是两者的图像存在些许不同,在刚开始的3s时间区间内,两者的趋势一致,均是先递减在递增,最后到达平缓。但是在6s左右,角加速度为20deg/sec^2的槽轮出现了剧烈的波动,函数曲线呈大幅值下降,两者均在8.5s左右出现函数曲线的波谷值,但是角加速度为20deg/sec^2的槽轮出现的波谷值与前一次的波谷值存在1500deg/sec^2的差值。当槽数均为4时,角加速度为20deg/sec^2的槽轮的角加速度最大值为1300deg/sec^2,角加速度为10deg/sec^2的槽轮的角加速度最大值为700deg/sec^2,它们之间相差1.86倍。并且对比两者的函数图像,在6s~7s的时间区间内,角加速度为20deg/sec^2的槽轮多出了先递减,再递增,后平稳3个运动表现,在8.9s左右,角加速度为20deg/sec^2的槽轮出现了正值波动,其值为1000deg/sec^2,此时波谷值大小与波峰值大小的差值为300deg/sec^2,但是角加速度为10deg/sec^2的槽轮却在9.3s左右的时间节点出现了正值波动,其值为380deg/sec^2,此时波谷值大小与波峰值大小的差值为320deg/sec^2。当槽数均为6时,角加速度为20deg/sec^2的槽轮的角加速度最大值为675deg/sec^2,角加速度为10deg/sec^2的槽轮的角加速度最大值为175deg/sec^2,它们之间相差3.86倍。两者的函数图像走向也存在些许差异,在前4s的时间区间内,两者的曲线趋势基本一致,在5.0s~7.0s的时间区间内,角加速度为20deg/sec^2的槽轮出现了第一个波谷值和第一个波峰值,即函数图像处于先递减后递增,经历了0.05s的平稳期,在递增,后递减的状态。在临近8.5s左右的时间节点,虽然两组均出现了先递减后再递增的状态,但是持续时间相差了将近0.7s。综合6槽槽轮机构角加速度为20deg/sec^2和角加速度为10deg/sec^2的两组,角速度为10deg/sec^2的那组只有一个波谷值,角速度为20deg/sec^2的槽轮出现了两个波谷值和一个波峰值,两个波谷值大小相差325deg/sec^2,波谷值和波峰值大小的差值分别为325deg/sec^2和0deg/sec^2。 综合上面的分析可知,当槽轮的槽数确定时,角加速度减少为原来的一半,最后从动轮的角加速度并不是跟角速度一样,能够做到严格意义上减少为原来的50%,可见槽轮的角加速度在主从动轮之间传递呈现非严格的线性关系。此外,当角加速度为20deg/sec^2时,3槽机构存在两个波谷值,4槽机构存在一个波峰和一个波谷值,6槽机构存在两个波谷值和一个波峰值,3组的值没有规律可循,再来看角加速度为10deg/sec^2的槽轮,由于3槽和6槽机构仅仅只存在一个波谷值,并且4槽的波峰值和波谷值的差值没有发现规律性,所以角加速度为20deg/sec^2和10deg/sec^2的槽轮波峰与波谷的差值没有规律可循迹。
4.结束语
本文通过阐述水产品高效自清洁生产线的工作原理和工作过程,以槽轮机构为起点,以主动拨盘和从动槽轮为组件,基于Pro/E软件的图像分析,得到了在相同条件下,槽轮槽数与角速度和角加速度的关系,即槽轮槽数越多,角速度和角加速度越小,传动越平稳的结论,同时也得到了当槽轮槽数一定时,改变主动轮的角速度和角加速度,从动轮的角速度呈现规律变化,但是角加速度不成规律变化的结论。从Pro/E的运动参数中分析可知,人们可以依照实际的水产清理需求,可以适当的选择槽轮槽数去适配实际所需的角速度和角加速度,找出最佳的参数值,来提高实际的水产品清理效率,并且也可以当槽轮槽数确定时,通过改变主动轮的角速度和角加速度,我们在从动轮上也能到实际生产所需要的最佳参数值。
参考文献:
[1]徐荣,侯晓晨,周艳芳,侯克青. 槽轮机构的运动参数量化分析[J]. 煤矿机械,2018,39(08):89-91.
[2]杨彬彬,王春涛. 一种水产加工用高效自清洁生产线[P]. 浙江省:CN113662033A,2021-11-19.
[3]支保军. 基于Pro/E槽轮机构三维建模及运动仿真分析[J]. 机械研究与应用,2011,24(05):141-142.
[4]马建辉,于良杰,车晓波,王勇. 基于STM32F103的角磨机开关磁阻电机控制器的设计[J]. 电子产品世界,2021,28(07):51-53.
[5]董馨雨. 两相混合式步进电机高精度闭环驱动控制系统及实验研究[D].沈阳工业大学,2021.
[6]雒钰花,高东强. 基于Pro/E的微型冲压机槽轮机构运动仿真与分析[J]. 机械设计与制造工程,2019,48(02):6-8.
[基金项目]国家级大学生创新训练项目,一般项目,项目编号(202110340055)
[作者简介]杨彬彬(2000—),男,江苏盐城人,机电专业,本科在读。

 京公网安备 11011302003690号
京公网安备 11011302003690号


