



- 收藏
- 加入书签

改进的永磁同步电机双矢量模型预测电流控制
 打开文本图片集
打开文本图片集


摘要:传统的单矢量模型预测电流控制在一个控制周期只能够输出一个电压矢量,因此最终输出的电压矢量方向和大小都是固定的,最终会导致控制性能较差。针对以上问题,本文提出了一种双矢量模型预测电流控制方法,该方法在计算得到参考电压矢量后,首先在所有的基本电压矢量中选择出第一最优电压矢量,然后再第一最优电压矢量的临近电压矢量中选择第二电压矢量,最后基于电流矢量跟踪误差最小化原理,确定所选电压矢量的持续时间。本文通过仿真实验验证了所提方法的有效性,结果表明本文所提出的方法相比于传统的单矢量模型预测电流控制,电流与转速的波动更小,能够获得更好的控制效果。
关键词:永磁同步电机;模型预测电流控制;双矢量;占空比优化
0 引 言
永磁同步电机(PMSM)具有功率密度高,体积小,结构简单等优点,目前已经广泛应用于许多工业领域[1-2]。针对永磁同步电机的控制,现在主要有矢量控制(FOC)[3-4]、直接转矩控制(DTC)[5]、模型预测控制(MPC)[6-7]等方法。近年来,随着计算机技术的提升,模型预测控制凭借其控制原理简单、动态响应好、方便约束非线性目标等优点,受到了越来越广泛的关注。
目前,永磁同步电机的模型预测控制主要有模型预测转矩控制(MPTC)[8]、模型预测电流控制(MPCC)[9]以及模型预测速度控制(MPSC)[10-11],其中,模型预测电流控制又可以分为有限集模型预测电流控制(FCS-MPCC)[12-13]和连续集模型预测电流控制(CCS-MPCC)[14]。有限集模型预测电流控制因其考虑了逆变器开关信号的离散性,所以电流的动态响应更好。但是,传统的有限集模型预测电流控制在一个控制周期内只施加一个电压矢量,这会导致电流、转矩以及转速的波动较大,通过提高采样频率可以改善其控制性能,但同时也增加了计算量,对硬件设备也提出了更高的要求。
针对以上问题,目前广泛采用的是在一个控制周期内施加多个电压矢量的方式来提高控制性能,即多矢量控制方式。文献[15]采用了在一个控制周期内施加一个非零矢量以及一个零矢量并对两个矢量的占空比进行优化的控制方式。但该方式第二个矢量的选择仅限于零矢量,因此并不能很好地减小电流以及转矩地波动。文献[]提出了一种基于广义双矢量的感应电机模型预测转矩控制方法,该方法将非零矢量纳入到第二个矢量的选择范围中,能够有效地提高控制性能。但是,尽管该方法在矢量的选择组合中剔除了24种不合理的冗余组合,但对剩余的25种适量组合进行滚动优化仍是一个不小的计算负担,这也在一定程度上限制了这种方法的应用。文献[16]提出了一种通用的基于多矢量的模型预测控制方法,该方法采用基于空间矢量调制的无差拍控制直接获得最优矢量及其占空比,效地减小了计算量。但为了实现这一过程,其代价函数只能考虑磁链的跟踪误差,而不能同时约束其他非线性目标,牺牲了模型预测控制的一大优点。
针对以上问题,本文提出了一种双矢量模型预测电流控制方法,该方法对7个基础矢量只进行一次滚动优化,在得到最优矢量作为第一个矢量后,在最优矢量的相邻矢量中选择第二个矢量,并进行占空比优化。在这一过程中,代价函数可以同时对非线性目标进行约束。
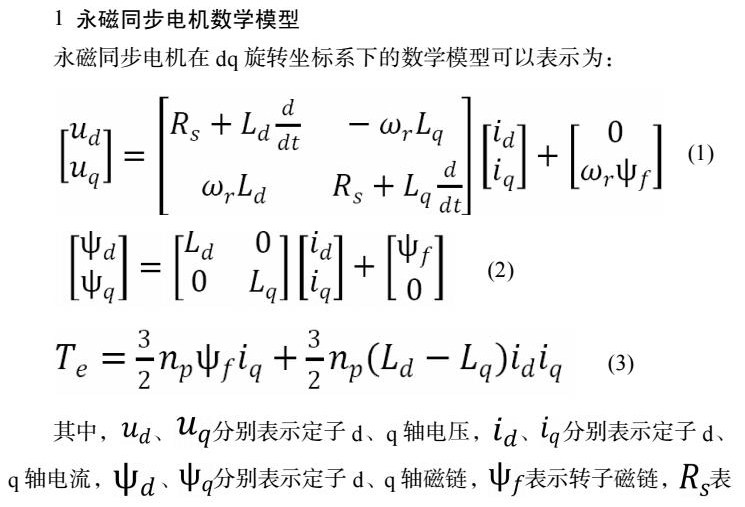
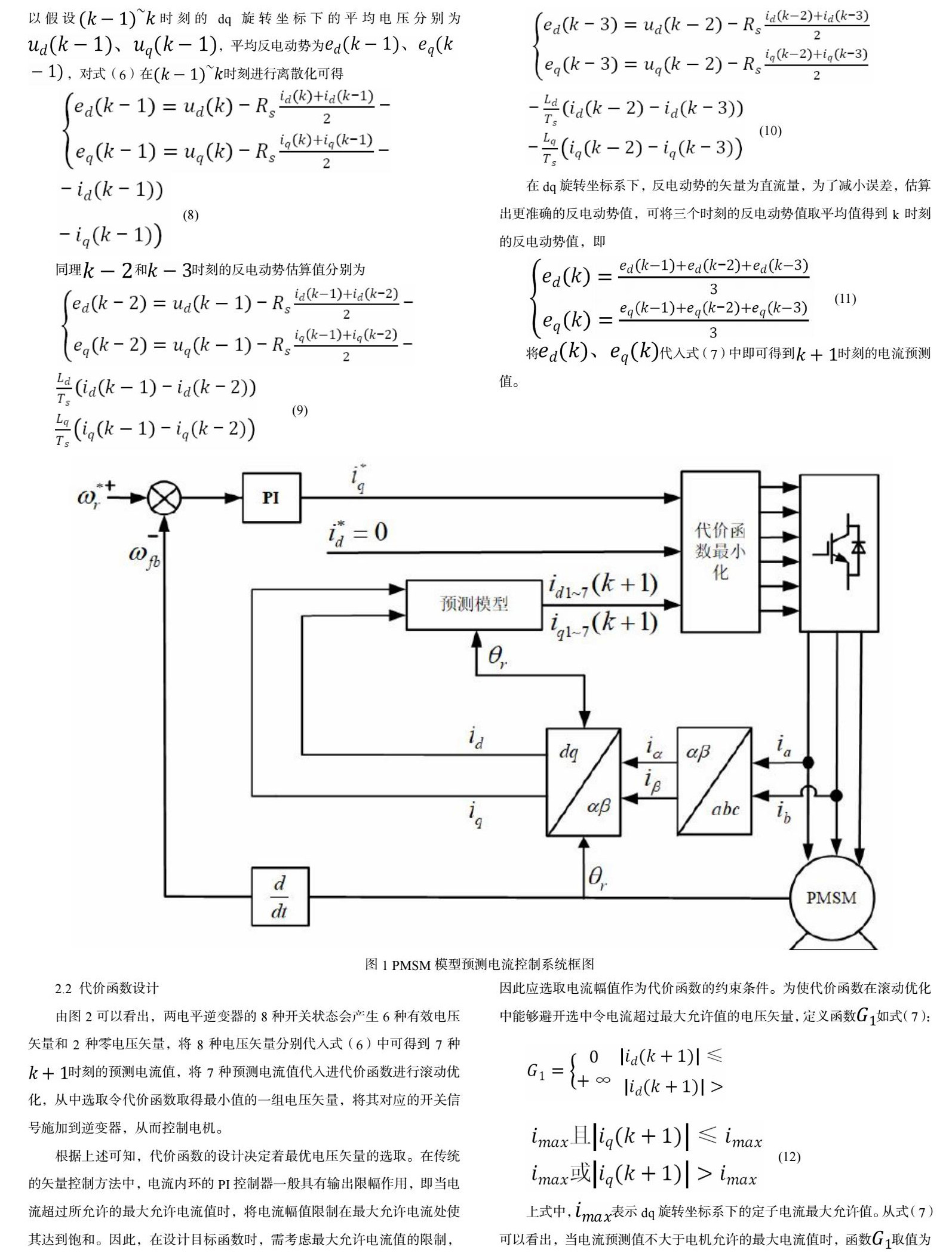
1 永磁同步电机数学模型
3 改进的双矢量模型预测电流控制方法
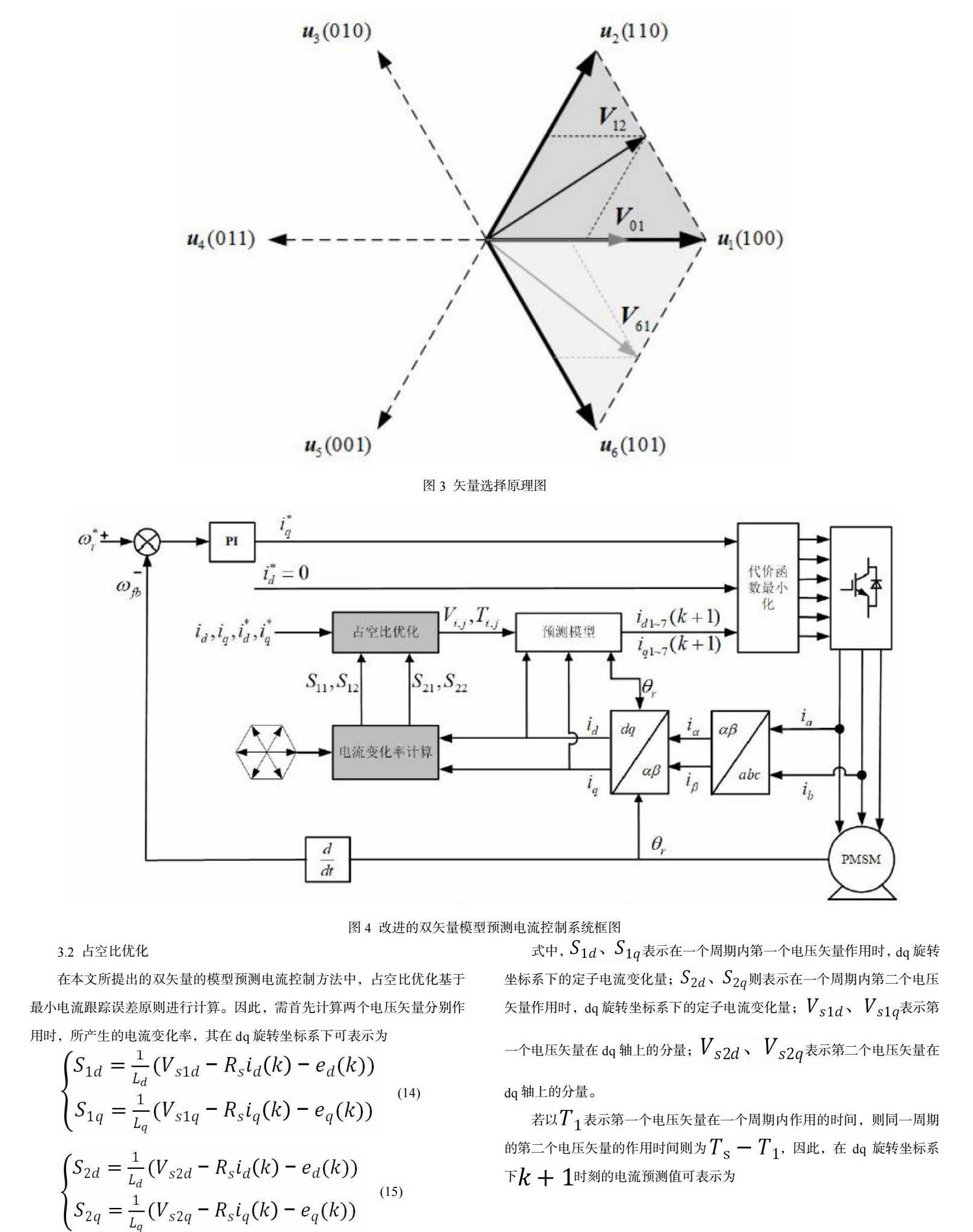
3.1 基本原理
传统的双矢量模型预测电流控制在一个周期内采用一个有效电压矢量和一个零电压矢量的组合,该方法可以改变逆变器所发电压矢量的幅值,而电压矢量的方向仍然固定在6个有效电压矢量所在的方向。虽然该方法的稳态性能由于单矢量的模型预测电流控制方案,但其电流以及转矩的波动依然较大。若将第二个矢量的选择范围扩大至所有基础矢量,则需要对7×7种电压矢量组合进行滚动优化,极大地增加了计算量。针对以上问题,本文提出了一种快速选择矢量的控制方法,并根据最小化电流跟踪误差的原则确定两个电压矢量的作用时间,该方法在提高电机稳态控制性能的同时,极大地降低了算法复杂度。
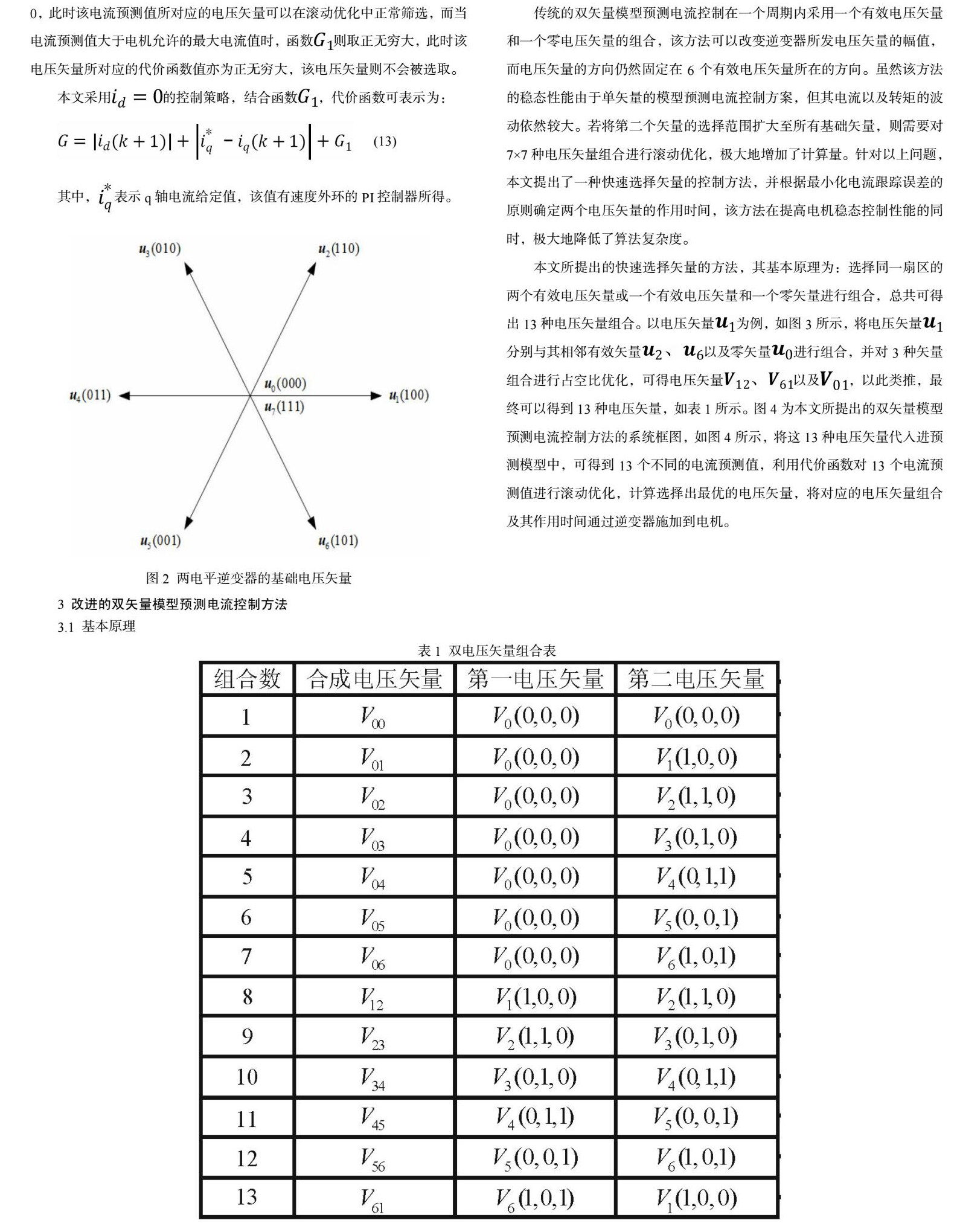
本文所提出的快速选择矢量的方法,其基本原理为:选择同一扇区的两个有效电压矢量或一个有效电压矢量和一个零矢量进行组合,总共可得出13种电压矢量组合。以电压矢量为例,如图3所示,将电压矢量分别与其相邻有效矢量、以及零矢量进行组合,并对3种矢量组合进行占空比优化,可得电压矢量、以及,以此类推,最终可以得到13种电压矢量,如表1所示。图4为本文所提出的双矢量模型预测电流控制方法的系统框图,如图4所示,将这13种电压矢量代入进预测模型中,可得到13个不同的电流预测值,利用代价函数对13个电流预测值进行滚动优化,计算选择出最优的电压矢量,将对应的电压矢量组合及其作用时间通过逆变器施加到电机。
4 仿真实验与分析
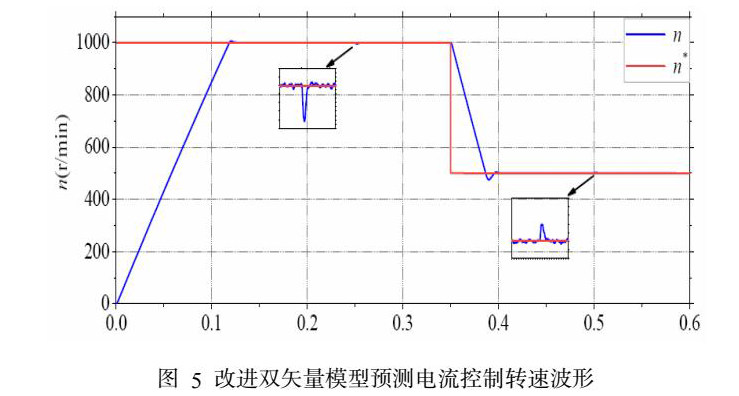
在Matlab/Simulink仿真软件中对本文所提方法进行验证,并与传统的双矢量模型预测电流控制进行对比。仿真实验中所采用的电机参数如表2所示,其中仿真时间为0.6s,控制周期。在仿真实验中,给定转速先设置为1000,使电机从零速状态下起动,在0.25s时对电机施加10的负载转矩,在0.35s时将给定转速设置为500,在0.50s时将负载转矩由10减至2,通过对电机进行起动、加载、减速、减载等一系列操作来验证算法的有效性。
图5为改进双矢量模型预测电流控制的转速波形图,可以看出,在给定转速发生变化时,电机转速可以快速跟踪到给定转速;当负载转矩发生变化时,电机转速在经过小的波动后也可以迅速恢复到给定转速;另外,由于改进后的双矢量方中第二个矢量不仅限于零矢量,因此电机稳态运行时转速波动也很小。
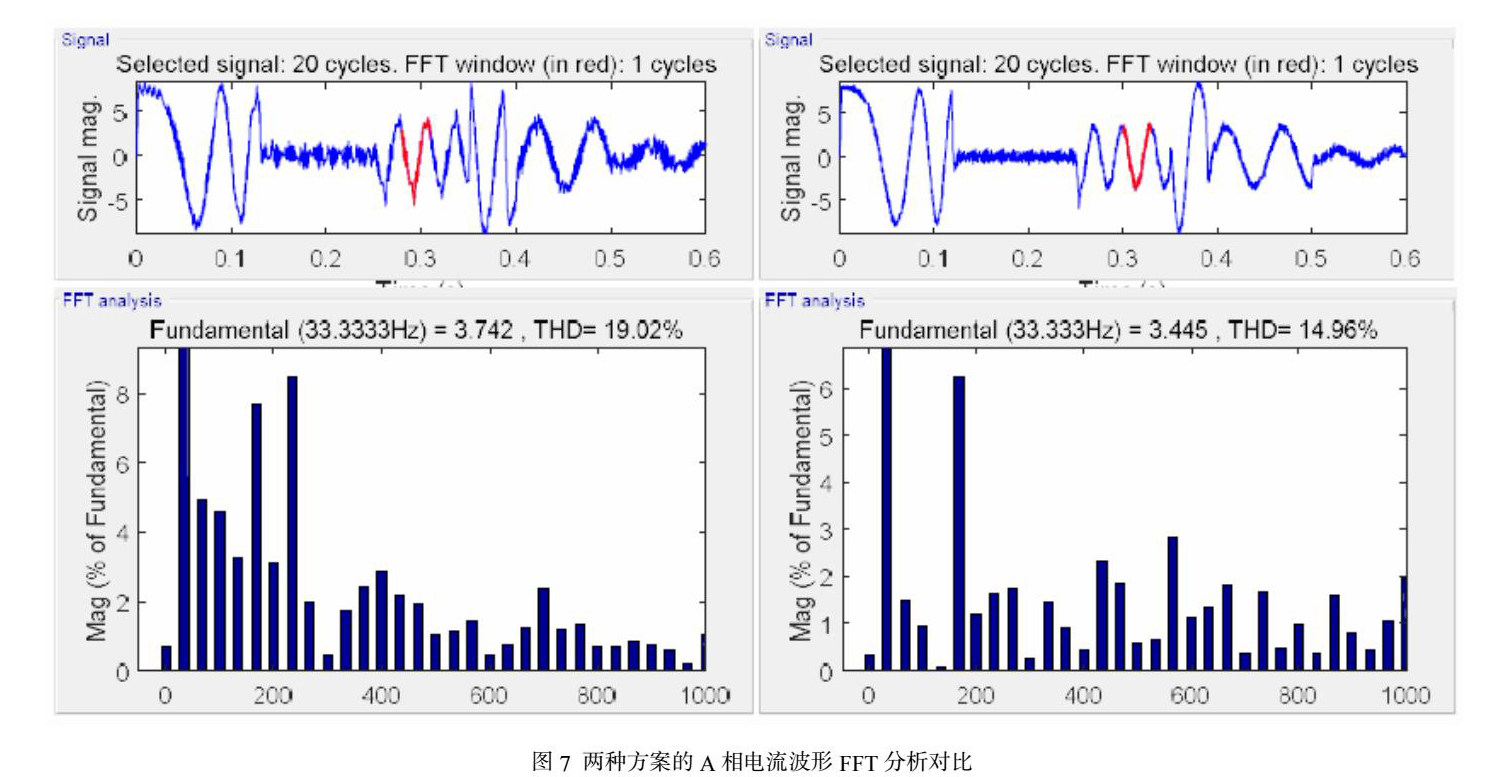
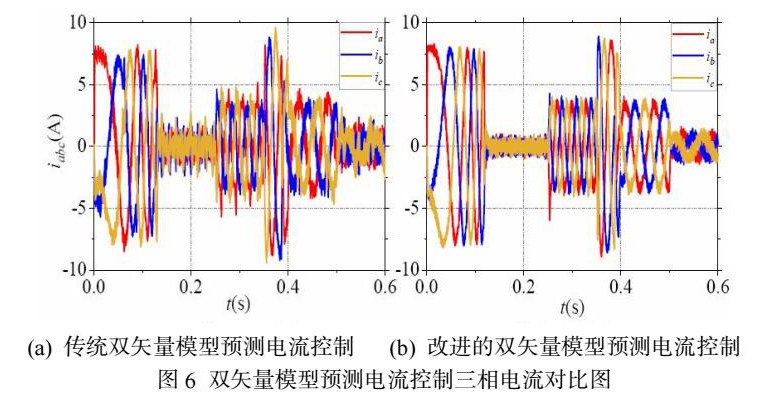
图6为本文提出的方法与传统双矢量模型预测电流控制的定子三相电流波形对比图,从图中可以看出,改进后的双矢量方法相比于传统的双矢量方法,其电流波动更小。在图7中分别对两种控制方案下的a相电流进行了傅里叶分析。选取0.28s时一个周期内的电机定子A相电流波形进行分析,此时电机的转速稳定在并被施加的负载转矩。其中传统双矢量MPCC方案的电流波形畸变率为,改进双矢量MPCC方案的电流波形畸变率为。从图7也可以看出,改进后的双矢量模型预测电流控制的谐波含量更小,电流波动也更小。
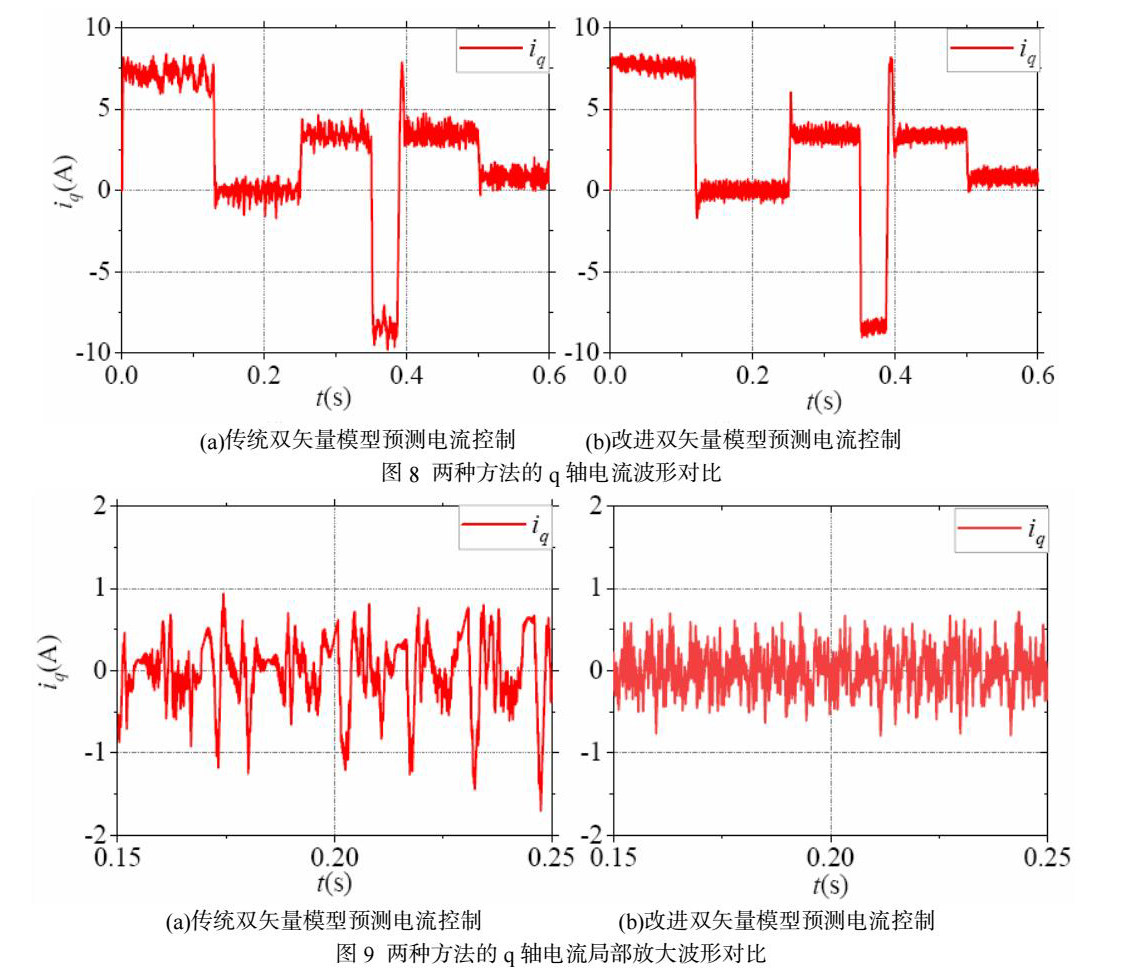
图8为改进双矢量模型预测电流控制与传统的双矢量模型预测电流控制的q轴电流波形对比图。从图中可以看出,两种方法的q轴电流都可以快速的跟踪q轴电流参考值,但改进后的双矢量模型预测控制的电流波动更小。图9是截取两种方法的一部分q轴电流波形进行对比,从图9中,可以更明显地看出改进双矢量模型预测电流控制的电流波动更小,因此其稳态性能也更好。
5 结 论
传统的双矢量模型预测电流控制在一个控制周期内采用一个有效矢量和一个零矢量的组合,虽能在单矢量的基础上提高稳态性能,但依然不够理想,若将两个矢量的选择范围扩大到所有基础矢量,矢量组合则又过多,极大地增加了计算量。针对以上问题,本文为提出了一种快速选择矢量的双矢量控制方法,采用一个有效矢量与其相邻矢量或一个有效矢量与一个零矢量的组合,一共可以得到13种矢量组合,对这13种矢量组合进行占空比优化,并带入代价函数进行选择,得到最优的矢量组合及其占空比。经过仿真实验验证,本文提出的方法可以有效降低电流波动,提高稳态性能,同时没有过多的增加算法的复杂度。
参考文献
[1] Y. Dai, L. Song and S. Cui, "Development of PMSM Drives for Hybrid Electric Car Applications," in IEEE Transactions on Magnetics, vol. 43, no. 1, pp. 434-437, Jan. 2007, doi: 10.1109/TMAG.2006.887718.
[2] S. Morimoto, Y. Asano, T. Kosaka and Y. Enomoto, "Recent technical trends in PMSM," 2014 International Power Electronics Conference (IPEC-Hiroshima 2014 - ECCE ASIA), 2014, pp. 1997-2003, doi: 10.1109/IPEC.2014.6869862.
[3] F. Korkmaz, İ. Topaloğlu, M. F. Çakir and R. Gürbüz, "Comparative performance evaluation of FOC and DTC controlled PMSM drives," 4th International Conference on Power Engineering, Energy and Electrical Drives, 2013, pp. 705-708, doi: 10.1109/PowerEng.2013.6635696.
[4] M. Abassi, A. Khlaief, O. Saadaoui, A. Chaari and M. Boussak, "Performance analysis of FOC and DTC for PMSM drives using SVPWM technique," 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), 2015, pp. 228-233, doi: 10.1109/STA.2015.7505167.
[5] Mesloub H, Boumaaraf R, Benchouia M T, et al. Comparative study of conventional DTC and DTC_SVM based control of PMSM motor—Simulation and experimental results[J]. Mathematics and Computers in Simulation, 2020, 167: 296-307.
[6] Zhang Y, Xu D, Huang L. Generalized multiple-vector-based model predictive control for PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2018, 65(12): 9356-9366.
[7]徐艳平,张保程,周钦.永磁同步电机双矢量模型预测电流控制[J].电工技术学报,2017,32(20):222-230.DOI:10.19595/j.cnki.1000-6753.tces.160308.
[8] Chen L, Xu H, Sun X, et al. Three-vector-based model predictive torque control for a permanent magnet synchronous motor of EVs[J]. IEEE Transactions on Transportation Electrification, 2021.
[9] Zhang X, Zhang L, Zhang Y. Model predictive current control for PMSM drives with parameter robustness improvement[J]. IEEE Transactions on Power Electronics, 2018, 34(2): 1645-1657.
[10] Preindl M, Bolognani S. Model predictive direct speed control with finite control set of PMSM drive systems[J]. IEEE Transactions on Power Electronics, 2012, 28(2): 1007-1015.
[11] Garcia C, Silva C, Rodriguez J, et al. Cascaded model predictive speed control of a permanent magnet synchronous machine[C]//IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2016: 2714-2718.
[12]徐艳平,张保程,周钦.永磁同步电机双矢量模型预测电流控制[J].电工技术学报,2017,32(20):222-230.DOI:10.19595/j.cnki.1000-6753.tces.160308.
[13]柳志飞,杜贵平,杜发达.有限集模型预测控制在电力电子系统中的研究现状和发展趋势[J].电工技术学报,2017,32(22):58-69.DOI:10.19595/j.cnki.1000-6753.tces.160399.
[14] Ahmed A A, Koh B K, Lee Y I. A comparison of finite control set and continuous control set model predictive control schemes for speed control of induction motors[J]. IEEE Transactions on Industrial Informatics, 2017, 14(4): 1334-1346.
[15] Zhang Y, Yang H. Generalized two-vector-based model-predictive torque control of induction motor drives[J]. IEEE Transactions on Power Electronics, 2014, 30(7): 3818-3829.
[16] Zhang Y, Bai Y, Yang H. A universal multiple-vector-based model predictive control of induction motor drives[J]. IEEE Transactions on Power Electronics, 2017, 33(8): 6957-6969.
作者简介:荣国庆(1970—)男,江苏徐州人,毕业于中国矿业大学机械电子专业,本科,工程师,现就职于江苏徐矿能源股份有限公司张双楼煤矿通讯计算机中心,从事煤矿智能化管理工作。

 京公网安备 11011302003690号
京公网安备 11011302003690号


