



- 收藏
- 加入书签

基于ANSYS的机械臂模态分析及静力学分析
 打开文本图片集
打开文本图片集
摘 要 工业机器人的机械臂在军事上以及人们日常生活的联系是十分紧密的。本文在简要介绍工业机器人的基础上,针对工业机器人机械臂进行了模态分析和静力学分析。首先设计了机械臂实体模型,确定其由回转机构、伸缩臂和四爪机械手等组成。基于ANSYS19.0对该机械臂分别进行了模态分析和静力学分析,进而详细讨论了前六阶固有频率和相应振型,给出了设计参考,为结构动力学特性等提供参考依据。根据静力学分析结果,提出不足与设计薄弱之处,为进一步的结构优化提供有力依据。归纳该机械臂的优势和不足,并对其未来发展趋势进行了构想和展望。
关键字 机械臂;模态分析;静力学分析;ANSYS WORKBENCH
1 引言
机械臂是工业装配工业机器人最重要的部件之一,对工具的支撑和稳定性有着十分重要的影响,它决定了工业机器人的工作性能和效率[1]。机器人先进性可以说代表了一个国家制造业水平的高低,对生产和推进社会发展具有非常重要的意义。
振动理论、静力学分析在很大程度上改变了我们对机械结构的设计理念与方案[2]。随着计算机技术的高速发展,我们可以借助高性能计算机对机器臂进行模态分析和静力学分析,在短时间内尽可能多的获得模拟仿真数据,为以后的结构优化、动力学特性分析等提供参考依据[3]。鉴于ANSYS强大的分析功能,快速、准确的模拟以及便于操作等优点[4],有限元分析在机械臂结构中的研究是有重大意义的。
为了适应更高效、高精度的竞争形势,考虑到目前人形机械手的设计方法,根据中国人的手臂尺寸,本文设计了一种工业装配外骨骼机器人的机械臂。为证明该机械手性能的可行性,本文利用ANSYS软件对该机械臂进行模态分析和静力学分析,确定其薄弱环节,为机械臂的动态设计和优化设计提供有效的理论依据。
2 机械臂模型的建立与简化
由于该机械臂结构比较复杂,在对机械臂进行有限元分析时,为了迅速准确的得到计算结果,需要对模型进行合理简化[5]。简化原则是:简化后的物理模型不影响结构的实际静力学特性。
2.1机械臂模型的建立
由于该结构比较复杂,在不影响精度的情况下,可以简化其结构,以便于后期分析。该机械臂锚固在工业外骨骼机器人上,工作时较为稳定。机械臂的整体结构,主要由回转机构、伸缩臂和四爪机械手等组成。
2.2机械臂模型的简化
根据上述简化原则,对机械臂结构中一些螺纹孔、倒角以及各种对整体影响较小的平台进行忽略,将螺栓连接改为固定连接,保留该机械臂原始模型重要的特征[6],简化后的机械臂模型长度约为800 mm。
3 机械臂模型模态分析
近年来,根据实际工程运用情况的需要,模态分析作为工程计算的常用工具,被用于计算和分析其固有频率和振型[7]。系统的固有频率是由结构本身而决定的[8]。在大多情况下,节点是机械结构最薄弱的环节之一,是容易发生破坏的部位[9]。对机械臂模型进行模态分析主要包括三大步:前处理包括了模型导入、材料赋予和网格划分;求解设定包括边界条件约束、载荷施加和求解方法的设定;后处理包括结果与分析[10]。
3.1实际工况及材料设定
机械臂的材质选择Q345,其密度为7800 kg/m3,弹性模量为2.07×1011 Pa,泊松比为 0.3。表1为机械臂的材料参数。根据实际工程应用,安全系数取2,则其许用应力值为345/2=172.5MPa。
3.2机械臂有限元模型的前期处理
运用ANSYS19.0对机械臂进行模态分析,从SolidWorks软件中导入模型后,赋予材料特性。考虑机械臂结构特点和为了保证结果的精度,在ANSYS软件前处理Design Model模块中对模型进行切分[11],共得到641751个节点和428618个单元。
3.3模态分析的结果
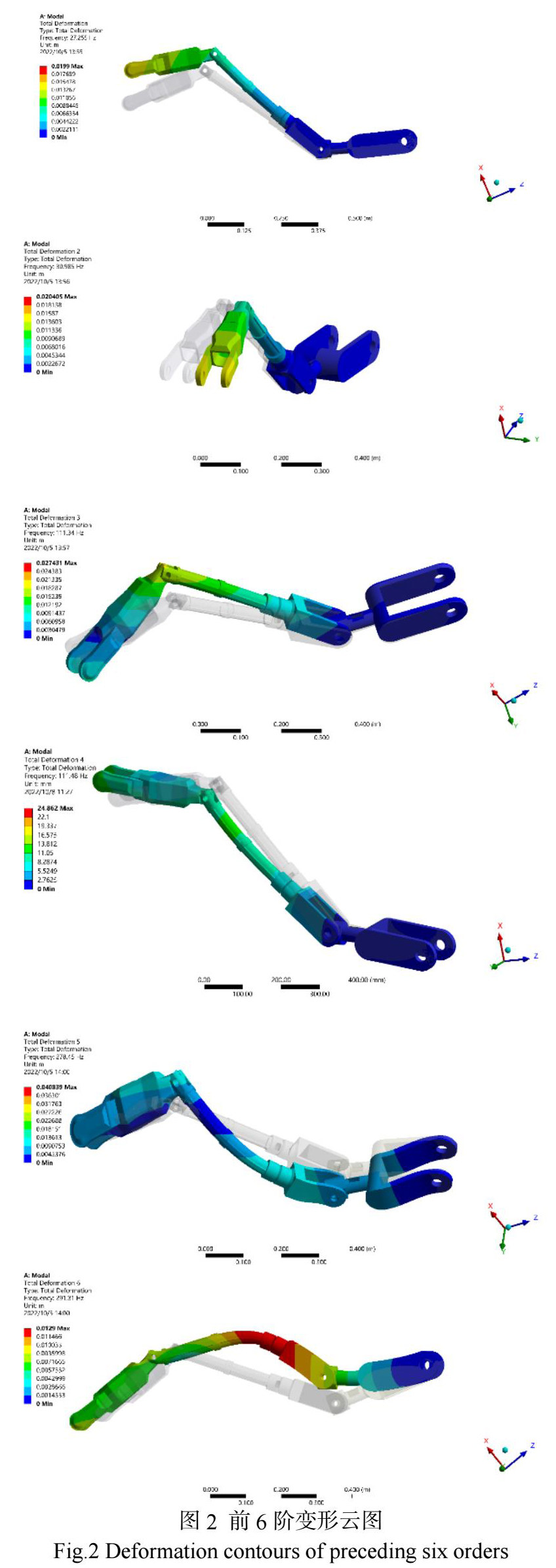
在实际工作中,要求机械臂本身的固有频率应避开动力输出的脉动频率[12]。在不考虑外部载荷的前提下,本文对机械臂进行了前六阶模态分析,可以预测机械臂结构在本体振动时的动态特性。通过分析振动云图,可以为机械臂自身结构的优化提供有利的参考。
一阶振动固有频率为27.255 Hz,机械臂整体结构前端上下俯仰,最大位移发生在机械臂与四爪手爪连接处。二阶振动固有频率为30.985 Hz,机械臂整体结构的左右摇摆,最大位移发生在机械臂前端连接手爪处。三阶振动固有频率为111.34 Hz,机械臂整体发生左右摇摆,振动明显影响正常工作,。四阶振动固有频率为111.48 Hz,整个机械臂的上下摇摆,其中靠近腰部的连杆处发生明显变形,最大位移就发生在连杆处,。连杆出现较大变形情况。在第5阶振型和第6阶振型中,固有频率分别为278.45 Hz和291.31 Hz,变形明显,位移量较大,影响实际正常工作。通过分析可知,该机械臂作为工业机器人装配体,其位姿的情况对固有频率和振型具有一定的影响,在低阶情况下影响不是很大。同时,我们需要对该机械臂机械结构进行优化,以提高机械臂的固有频率,避免在共振频率下工作。
4 静力学分析
4.1边界条件设置
利用ANSYS19.0的Static Structural模块对机械臂进行静力学分析。根据机械臂的实际情况,对机械臂进行重力加载,同时在四爪机械手爪处设置1 MPa的载荷。将机械臂末端与工业机器人连接处设置为固定结构,为全约束状态。
4.2结果的处理和分析
在机械臂的四爪机械手设置 1 MPa的载荷,在所受负载和自身结构部件的重力作用下,通过分析得到变形及应力分布情况,在进行机械臂静力学分析时,由于机械臂组件的质量和所在位置不同,其作业时各部件的受力效果也是不同的。对变形云图分析可知,四爪机械手处产生了最大0.50774 mm的变形量。并且变形量沿着机械臂本体结构逐渐递减,直到与工业机器人连接大臂处变形量为0。
对模型应力云图分析可知,整个模型有少部分的应力集中,最大应力值为 79.457 MPa,但仍小于Q345的许用应力值172.5MPa,说明机械臂符合设计要求,机身结构的稳定性能够达到预期要求。主要应力集中情况在四爪机械手上,设计时应予以关注。
5 结论
本文设计了一种基于外骨骼机器人的机械臂,并对该机械臂的结构进行了有限元分析,验证了其强度的可靠性,并得到机械臂的应力和变形云图以及各阶频率和振动变形。在静力学分析中得出机械臂的最大变形量为0.50774 mm,位于机械臂手爪位置处;最大应力为79.457 MPa,集中在爪部关节连接处。主要应力集中情况在四爪机械手上,设计时应予以关注。从模态分析中进一步为机械部结构优化提供有利的理论依据,得到了机械臂整体系统的机械特性,对机械臂整体结构做出进一步的优化,为下一步动力学的研究提供了支持。
参考文献
[1] 熊文英. 下肢外骨骼机器人系统参数辨识与控制器设计.电子科技大学; 2020.
[2] 李瑞亮, 慕松, 等. J. 机械传动. 基于Romax的风电齿轮箱齿轮修形仿真分析. 39 (4) (2015) 4.
[3] 费立凯. 压电悬臂梁式振动能量收集技术研究. 华北电力大学(北京);华北电力大学.
[4] 郑贝佳. 基于ANSYS/LS-DYNA的船体外板非对压多压头冲压成形数值模拟研究.武汉理工大学; 2013.
[5] 冯诚. 快速柔性多体动力学分析及其在机械臂优化中的应用. 广东工业大学.
[6] 陈岩. 螺栓松动的失效机理以及对整体结构力学行为的影响研究. 大连理工大学; 2019.
[7] 毛彩菊, 王. J. 制造业自动化. 车身的模态分析及疲劳寿命计算. 33 (11) (2011) 5.
[8] 于. J. 机械科学与技术. 机械结构系统固有频率的一种子结构修改方法. 16 (4) (1997) 5.
[9] 许. J. 大众科技. 使用ANSYS在机械结构分析过程中的体会. (7) (2006) 2.
[10] J. J. C. Q. o. M. Zhang. Interface Design between AutoCAD and ANSYS. (2005).
[11] 刘铁铮. 下线压接机抓线机械手的设计和关键技术研究. 河南科技大学; 2016.
[12] Zhou, QF, Ning, YP, QQ, Luo, LK, Lei, J. J. S. H. MONIT. Structural damage detection method based on random forests and data fusion. (2013).

 京公网安备 11011302003690号
京公网安备 11011302003690号


