



- 收藏
- 加入书签

一种基于极大似然估计的非协作目标定位算法
 打开文本图片集
打开文本图片集
摘 要:非协作目标定位技术在入侵检测,目标跟踪和空难、海难搜救等领域都有着十分重要的作用。在截获目标的电子参数中,可用来定位参数有信号强度,信号到达角,信号到达不同传感器的到达时间差、到达频率差等。基于到达时间差的定位方案对设备要求较低且定位精度较高,因此目前在目标定位领域得到了广泛的应用。但由到达时间差构成的定位方程是高度非线性的,将非线性方程组转化为线性方程组的过程中需要舍弃高阶误差项,因此这类在定位利用的到达时间差误差较高时误差较大。针对这种缺陷,本文提出了一种不需要进行方程组转化,而是直接对极大似然估计的非线性方程组进行求解的半正定规划算法,仿真实验表明,在信号测量噪声较高时本文提出算法的定位精度高于现有算法。
关键词:到达时间差;非协作目标;极大似然算法
0 引言
基于到达时间差的非协作目标定位算法以其对设备要求较低且定位精度较高的特点,在目标定位领域得到了广泛的应用[1-3]。近三十年中,国内外的许多学者进行了深入的研究。1976年,Taylor最早提出了泰勒级数展开算法,将非线性定位方程组进行线性展开并求解,由于该算法采用了迭代求解的方式,因此需要足够精确的初值估计以保证收敛[4];1994年,Chan和Ho提出了目前应用最广泛的两步加权最小二乘算法[5],该算法计算简单且在测量噪声强度较低时其均方根误差可以达到克拉美罗下界,因此在工程实践中得到了广泛的应用。该算法提出后,诸多学者对其进行了许多完善与优化,2007年,Ho分析了传感器自身位置误差对定位精度的影响,并结合传感器位置误差对定位算法进行了修正[6]。2008年,Ho和Yang又提出了利用校正传感器修正传感器位置误差的方法[7]。2012年,Ho在分析传统的均方根误差的基础上,又分析的算法的估计偏差,并给出了两种降低估计偏差的定位算法[8]。2015和2018年,Noroozi和Liu通过优化两步加权最小二乘算法中第二步的加权最小二乘表达式,提出了两种改进算法[9-10]。除了两步加权最小二乘算法,其它常用的定位算法还有约束加权最小二乘算法[11]、多维标度分析法[12]、半正定规划算法[13-15]等。以上算法在低测量噪声的环境下可以达到CRLB,但当随着测量噪声强度的增大,其面临严重的“门限效应”:当噪声强度达到某个强度时,算法的定位误差会急剧增大。
为了克服上述算法中存在的问题,本文提出了一种新的基于极大似然估计的算法。本文提出的算法首先将非线性的极大似然估计问题直接转化为半正定规划问题,并用内点法求解得到目标位置的初步估计,然后将得到的估计结果代入目标量测方程构造加权最小二乘表达式并求解,以进一步优化目标位置的估计。与其它算法相比,本算法规避了将极大似然估计问题转化为加权最小二乘问题时省略二阶误差项带来的精度损失,且本算法不需要任何关于目标位置的初始估计,也不存在迭代求解过程,因此也不存在收敛性问题。仿真实验表明,本算法在测量噪声较弱是算法的均方根误差可以达到CRLB,测量噪声强度较强时的定位精度相比现有的其它算法更高。
1定位模型
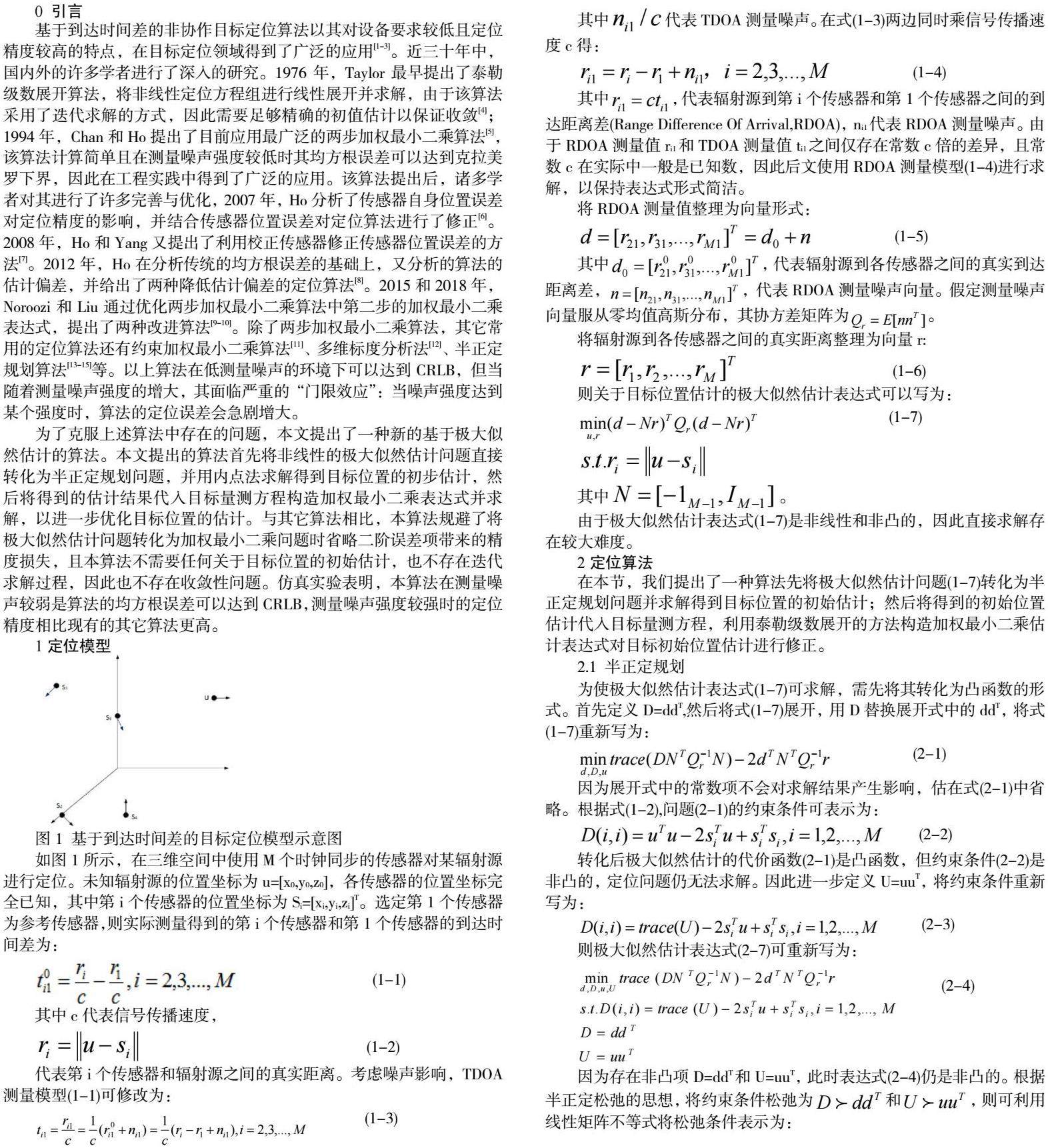
如图1所示,在三维空间中使用M个时钟同步的传感器对某辐射源进行定位。未知辐射源的位置坐标为u=[x0,y0,z0],各传感器的位置坐标完全已知,其中第i个传感器的位置坐标为Si=[xi,yi,zi]T。选定第1个传感器为参考传感器,则实际测量得到的第i个传感器和第1个传感器的到达时间差为:
其中,代表辐射源到第i个传感器和第1个传感器之间的到达距离差(Range Difference Of Arrival,RDOA),ni1代表RDOA测量噪声。由于RDOA测量值ri1和TDOA测量值ti1之间仅存在常数c倍的差异,且常数c在实际中一般是已知数,因此后文使用RDOA测量模型(1-4)进行求解,以保持表达式形式简洁。
将RDOA测量值整理为向量形式:
其中,代表辐射源到各传感器之间的真实到达距离差,,代表RDOA测量噪声向量。假定测量噪声向量服从零均值高斯分布,其协方差矩阵为。
将辐射源到各传感器之间的真实距离整理为向量r:
由于极大似然估计表达式(1-7)是非线性和非凸的,因此直接求解存在较大难度。
2定位算法
在本节,我们提出了一种算法先将极大似然估计问题(1-7)转化为半正定规划问题并求解得到目标位置的初始估计;然后将得到的初始位置估计代入目标量测方程,利用泰勒级数展开的方法构造加权最小二乘估计表达式对目标初始位置估计进行修正。
2.1 半正定规划
为使极大似然估计表达式(1-7)可求解,需先将其转化为凸函数的形式。首先定义D=ddT,然后将式(1-7)展开,用D替换展开式中的ddT,将式(1-7)重新写为:
因为展开式中的常数项不会对求解结果产生影响,估在式(2-1)中省略。根据式(1-2),问题(2-1)的约束条件可表示为:
转化后极大似然估计的代价函数(2-1)是凸函数,但约束条件(2-2)是非凸的,定位问题仍无法求解。因此进一步定义U=uuT,将约束条件重新写为:
则极大似然估计表达式(2-7)可重新写为:
因为存在非凸项D=ddT和U=uuT,此时表达式(2-4)仍是非凸的。根据半正定松弛的思想,将约束条件松弛为和,则可利用线性矩阵不等式将松弛条件表示为:
至此,可将非凸的极大似然估计问题转化为凸的半正定规划问题:
半正定规划问题目前有许多基于内点法的成熟求解工具,本文选取CVX最优化工具包求解问题(2-6),待求变量中的向量u即为目标的初始位置估计。
2.2 基于泰勒级数展开的精度提升算法
求解式(2-6)得到目标位置的初始估计后,可根据目标量测方程构建加权最小二乘估计表达式进一步提升目标位置初始估计的精度。
假设求解式(2-6)得到的目标位置初始估计为,再假设代表目标位置估计误差,则目标初始估计与其目标真实位置之间的关系可表示为:
3仿真实验
本小节将通过不同条件下的MATLAB仿真实验验证本文所提算法的定位性能。本小节将本文所提算法与两步加权最小二乘算法、约束加权最小二乘算法、半正定规划算法三种经典的基于到达时间差的定位算法和定位精度的均方误差的克拉美罗下界进行了比较。
在仿真实验中,假定使用由5只传感器组成的传感器网络对某未知辐射源进行定位,各传感器的位置坐标如表1所示。另外,假定各传感器的测量噪声是互相独立的,则测量噪声的协方差矩阵可以表示为,为测量噪声方差,T为(M-1)×(M-1)维矩阵,其主对角线元素为1,其余元素为0.5。
在仿真实验中分别使用估计的均方根误差和估计偏差来衡量算法的定位性能,其中估计均方根误差的定义为:
其中代表第l次蒙特卡洛实验的目标位置估计,代表目标位置的真实估计,代表蒙特卡洛仿真实验的次数。在本节中,仿真实验次数设置为5000。
实验中采用MATLAB半正定工具包求解式(2-6)以及半正定规划算法中的最优化问题,求解器选用SeDuMi,求解精度设置为最佳。
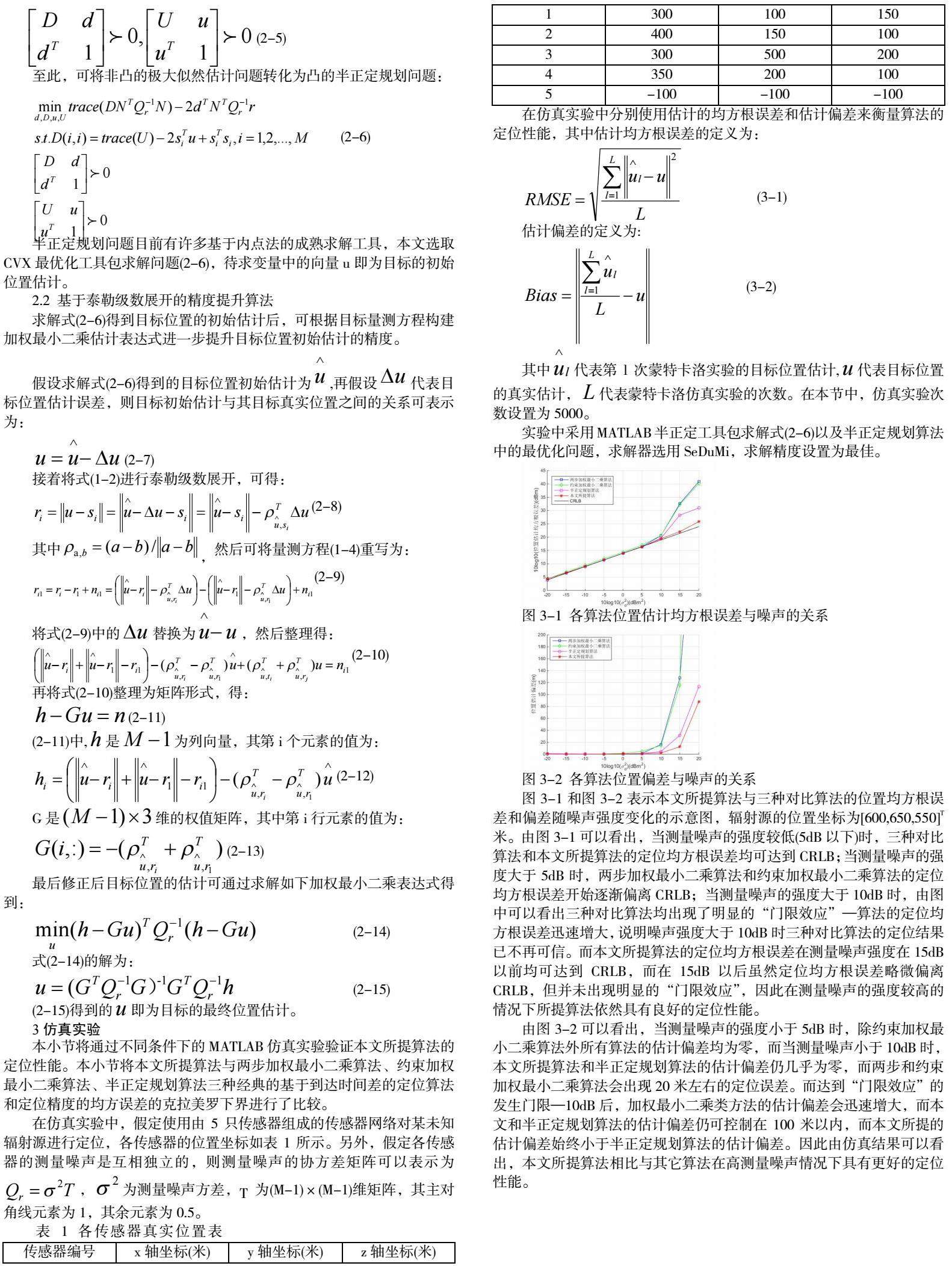
图3-1和图3-2表示本文所提算法与三种对比算法的位置均方根误差和偏差随噪声强度变化的示意图,辐射源的位置坐标为[600,650,550]T米。由图3-1可以看出,当测量噪声的强度较低(5dB以下)时,三种对比算法和本文所提算法的定位均方根误差均可达到CRLB;当测量噪声的强度大于5dB时,两步加权最小二乘算法和约束加权最小二乘算法的定位均方根误差开始逐渐偏离CRLB;当测量噪声的强度大于10dB时,由图中可以看出三种对比算法均出现了明显的“门限效应”—算法的定位均方根误差迅速增大,说明噪声强度大于10dB时三种对比算法的定位结果已不再可信。而本文所提算法的定位均方根误差在测量噪声强度在15dB以前均可达到CRLB,而在15dB以后虽然定位均方根误差略微偏离CRLB,但并未出现明显的“门限效应”,因此在测量噪声的强度较高的情况下所提算法依然具有良好的定位性能。
由图3-2可以看出,当测量噪声的强度小于5dB时,除约束加权最小二乘算法外所有算法的估计偏差均为零,而当测量噪声小于10dB时,本文所提算法和半正定规划算法的估计偏差仍几乎为零,而两步和约束加权最小二乘算法会出现20米左右的定位误差。而达到“门限效应”的发生门限—10dB后,加权最小二乘类方法的估计偏差会迅速增大,而本文和半正定规划算法的估计偏差仍可控制在100米以内,而本文所提的估计偏差始终小于半正定规划算法的估计偏差。因此由仿真结果可以看出,本文所提算法相比与其它算法在高测量噪声情况下具有更好的定位性能。
4结语
本文提出了一种基于到达时间差的多传感器目标定位算法。针对现有算法在定位方程组线性化中忽略高阶误差项,从而使算法在测量误差较大时定位精度较低的缺点,本文提出了一种直接极大似然估计求解目标位置的定位算法,先将目标的极大似然估计表达式转化为半正定规划表达式并求解得到目标位置的初始估计,再利用结合量测方程构造加权最小二乘估计式对目标初始位置估计进行修正。仿真实验表明本文所提算法的定位精度在测量噪声强度较高时明显优于其它算法。
参考文献:
[1]朱庆明,吴曼青.一种新型无源探测与跟踪雷达系统—“沉默哨兵”[J]. 现代电子,2000,(1): 1-6.
[2]毛泽湘,梁汝鹏. 基于圆概率误差的时差定位系统最优布站[J]. 指挥信息系统与技术,2020,11(4):74-77,83.
[3]周学平,张亚,赵晓莲. 多源测距下联合目标定位与传感器配准[J]. 指挥信息系统与技术,2021,12(2):70-74.
[4]W. H. Foy. Position-Location Solutions by Taylor-Series Estimation[J]. IEEE Transactions on Aerospace and Electronic Systems,1976, 12(2): 187-194.
[5]Y. T. Chan, K. C. Ho. A simple and efficient estimator for hyperbolic location[J]. IEEE Transactions on Signal Processing, 1994, 42(8): 1905-1995.
[6]K. C. Ho, X. Lu, L. Kovavisaruch. Source localization using TDOA and FDOA measurements in the presence of receiver location errors: analysis and solution[J]. IEEE Transactions on Signal Processing, 2007, 55(2): 684-696.
[7]K. C. Ho, L. Yang. On the use of a calibration emitter for source localization in the presence of senor position uncertainty[J]. IEEE Transactions on Signal Processing, 2008, 56(12): 5758-5772.
[8]K.C.Ho. Bias reduction for an explicit solution of source localization using TDOA[J].IEEE Transactions on Signal Processing,2012,60(5):2101-2114.
[9]Y. Liu, F. Guo, L. Yang, W. Jiang. An improved algebraic solution for TDOA localization with sensor position errors[J]. IEEE Communications Letters, 2015, 19(12): 2218-2221.
[10]A. Noroozi, A. H. Oveis, M. R. Hosseini, et al. Improved algebraic solution for source localization from TDOA and FDOA measurements[J]. IEEE Wireless Communications Letters, 2018, 7(3): 352-355.
[11]H. Yu, G. Huang, J. Gao, et al. An efficient constrained weighted least squaresalgorithmformovingsourcelocation using TDOA and FDOA measurements[J]. IEEE Transactions on Wireless Communications, 2012, 11(1): 44-47.
[12]H. Wei, R. Peng, Q. Wan, et al. Multidimensional scaling analysis for passive moving target localization with TDOA and FDOA measurements[J]. IEEE Transactions on Signal Processing, 2010, 58(3): 1677-1688.
[13]K. Lui, F. Chan, H. C. So. Semidefinite programming approach for range-difference based source localization[J]. IEEE Transactions on Signal Processing, 2009, 57(4): 1630-1633.
[14]G. Wang, Y. Li, N. Ansari. A semidefinite relaxation method for source localization using TDOA and FDOA measurements[J]. IEEE Transactions on Vehicular Technology, 2013, 62(2): 853-862.
[15]Y. Wang, Y. Wu. An efficient semidefinite relaxation algorithm for moving source localization using TDOA and FDOA measurements[J]. IEEE Communications Letters, 2017, 21(1): 80-83.

 京公网安备 11011302003690号
京公网安备 11011302003690号


