



- 收藏
- 加入书签

融合激光雷达与超声波数据的障碍物检测方法
 打开文本图片集
打开文本图片集



摘要:安全是无人驾驶的首要原则。如何以低成本稳健感知无人车所处环境十分重要。文章针对无人车车身周围近距离障碍物检测,使用一套(12个)环绕车身的超声波探头和2个16线激光雷达,设计了一套融合激光雷达数据与超声波数据的障碍物检测框架。针对超声波数据,设计了一套鲁棒的滤波算法,使超声波障碍物检测结果更加稳定。最后结合超声波位姿,融合点云数据,最终可稳定检测出激光雷达盲区内障碍物,保证车辆安全。
关键词:无人驾驶;清扫机器人;激光雷达;超声波测距;障碍物检测
引言
在车辆行驶过程中,障碍物是行进过程中影响安全的主要因素之一[1],需要对其检测,为智能驾驶系统的决策提供依据,使无人车实现动态避障,并进行局部路线规划,最终保障无人车的安全行驶。
目前基于激光雷达点云数据的障碍物的检测主要分为深度学习的方法与传统方法。基于深度学习障碍物检测方法,较为经典的有使用纯点云PointNet++模型[2],基于体素的SECOND模型[3],基于投影的FVNet模型[4],以上深度学习模型用于点云中的行人车辆等目标检测。这些基于深度学习的方法对算力要求较高,依赖高成本的GPU资源,其发热问题致使其部署的稳定性较差,同时需要大量的样本标注数据,容易对训练场景过度拟合,泛化能力较差。
相比深度学习的方法,传统的点云障碍物检测通过点云聚类实现。欧几里得聚类方法[5]基于点云距离聚类,DBSCAN[6]基于点云密度聚类。这些方法对于计算资源的耗费少,且对于场景的泛化能力较强。基于无人车的安全稳定性与算法实用性的考虑,本文在使用欧几里得距离增长法对点云进行聚类,进一步对点云进行体素滤波降采样,保持点云障碍物形状几何特征不变同时,降低数据存储量,生成点云障碍物。
但由于无人清扫车传感器部署方案,激光雷达存在盲区,无法检测到离车身较近的障碍物,容易造成安全隐患。因此需要使用其他传感器弥补该盲区,确保无人车安全行驶。Xin等人[7]使用4线激光雷达Ibeo补偿多线Velodyne雷达盲区。Zhong等人[8]使用多个LIDAR传感器消除盲区,袁春等人[9]使用单线激光雷达进行障碍物检测。但是这几种传感器的价格昂贵,Ibeo雷达和Velodyne多线激光雷达价格均在一万人民币以上,单线激光雷达价格也在两千人民币左右。视觉传感器获取的数据本身复杂性较高,图像底层视觉特征与高层语义特征之间对应关系存在极大分歧,且传统视觉方法易受光线条件影响,在夜间或者阴雨天气对障碍物的检测效果不佳。对于车身近距离(小于一米)的障碍物,智驾系统更关注障碍物是否存在,对障碍物位置的检测精度可以适当降低。这使超声波传感器成为一个性价比很高的选择。一套超声波传感器可以覆盖车身,价格可以控制在一千人民币左右,其测距精度也符合智驾系统的要求。
本文以中低速智能清扫车为硬件平台,如图1所示。使用2个速腾16线激光雷达分别安装于车的前左与前右,其水平视场角为360度,使用时,只取270度未遮挡部分。水平角分辨率为0.4度,垂直视场角为30度,垂直角分辨率为2度,每秒10帧数据。超声波传感器采用导向机电技术有限公司的KS136型号超声波,一套超声波12对探头,每个探头垂直角范围为30度左右,水平角范围为100度左右,理论测距范围为2cm-450cm,实际使用只用2cm-100cm作为有效值,前后各两对超声波探头,左右侧各4对超声波探头。超声波探头采用收发一体式设计,每个探头可以独立工作,拥有自体声波识别技术,能屏蔽掉大多噪音。
方法
点云障碍物检测方法
首先将地面从所述激光雷达点云数据中剔除,之后对剔除地面后的点云数据进行分割聚类,得到点云障碍物。进行地面提取时,仅对Z值较低的点云数据使用RANSAC方法进行平面拟合,得到平面参数,其法向量。地面法向量,若为给定阈值,则认为该平面为地面,得到地面参数并将其剔除。
用欧几里得增长算法对所述剔除地面后的点云数据进行点云分割聚类。对于空间某点P,找到K个离P点最近的点,将这些点中距离小于设定阈值的聚类到集合Q中。如果所述集合Q中元素的数目不再增加,整个聚类过程便结束,否则须在所述集合Q中选取所述P点以外的点,重复上述过程,直到所述集合Q中元素的数目不再增加为止,至此使用欧式距离完成了点云的分割聚类。
其次,使用体素化网格滤波算法,输入分割聚类后的点云数据,创建一个三维体素栅格即微小空间三位立方体的集合,然后在每个体素即三维立方体内用所述体素中的所有点的重心来近似显示所述体素中的其他点。这样一来,所述体素内的所有点就用一个重心点表示,减少点的数量即减少障碍物的点云数据量,同时保持障碍物形状的几何特征不变,得到点云障碍物。
在半封闭园区中,由于激光雷达盲区存在,无人智能清扫车容易和低矮的路障发生碰撞。16线激光雷达受其垂直视场角限制,在车身某些近距离区域内,点云聚类算法无法聚类成功,导致车辆无法检测到路障。因此使用超声波传感器对激光雷达进行补盲。
超声波数据滤波方法
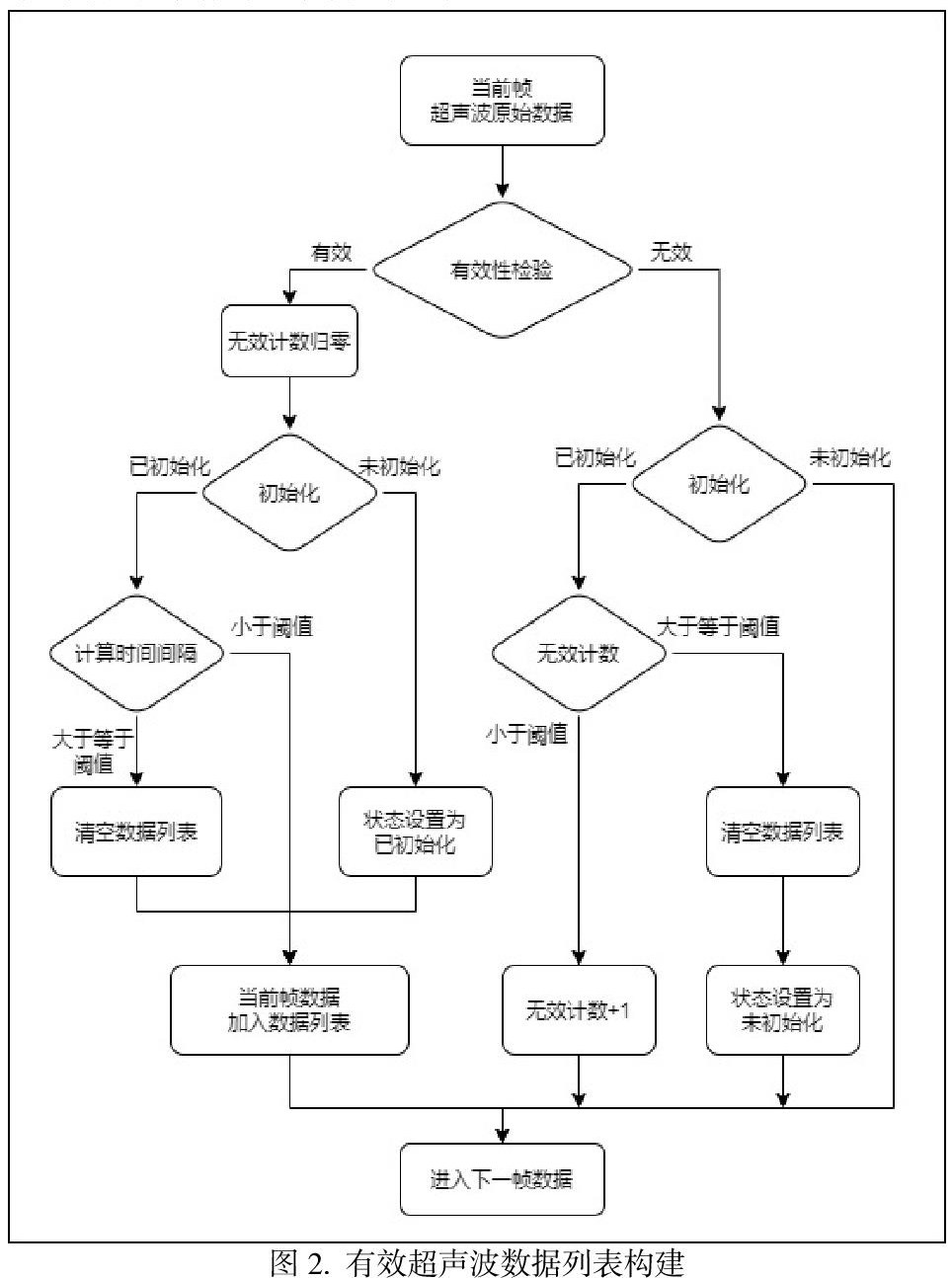
当超声波传感器在其感知范围探测到障碍物时,返回障碍物离超声波传感器的距离值,单个超声波传感器无法精确定位障碍物具体位置,只能确定障碍物大致位置为一弧形。对于超声波一米之外的障碍物,激光雷达可准确感知,因此认为一米之内的超声波数据为有效值。同时,超声波传感器不稳定,在超声波探头感知范围内不存在障碍物时,会返回有效值或在连续多帧有效值中会返回无效值。为了剔除此类正负噪声,提出滤波算法,构建有效超声波数据列表,如图2所示:
如果当前帧超声波原始数据有效,说明超声波传感器感知范围内可能存在障碍物,并将无效计数归零;若有效超声波数据列表未初始化,则将当前帧有效数据加入到所数据列表中,并将列表状态设为已初始化;若数据列表已初始化,且两帧有效数据相隔过长,则清空时序超声波数据列表,否则直接将当前帧有效数据加入数据列表中,进入下一帧数据的处理。
若当前帧超声波原始数据无效且数据列表未初始化,说明超声波感知范围内不存在障碍物,直接进入下一帧数据处理。若数据列表已初始化,说明超声波感知范围内不存在障碍物或超声波感知范围内存在障碍物,当前帧无效数据为负噪声。通常认为负噪声最多连续存在n帧,若无效计数大于或等于n,则认为超声波感知范围内不存在障碍物,清空有效超声波数据列表并将列表状态设置为未初始化。无效计数小于n,则增加无效计数。由于噪声不连续,可认为正噪声最多存在m帧,因此若超声波数据列表长度小于m,则认为超声波范围内不存在障碍物,否则存在障碍物。至此,有效超声波数据列表构建完成。
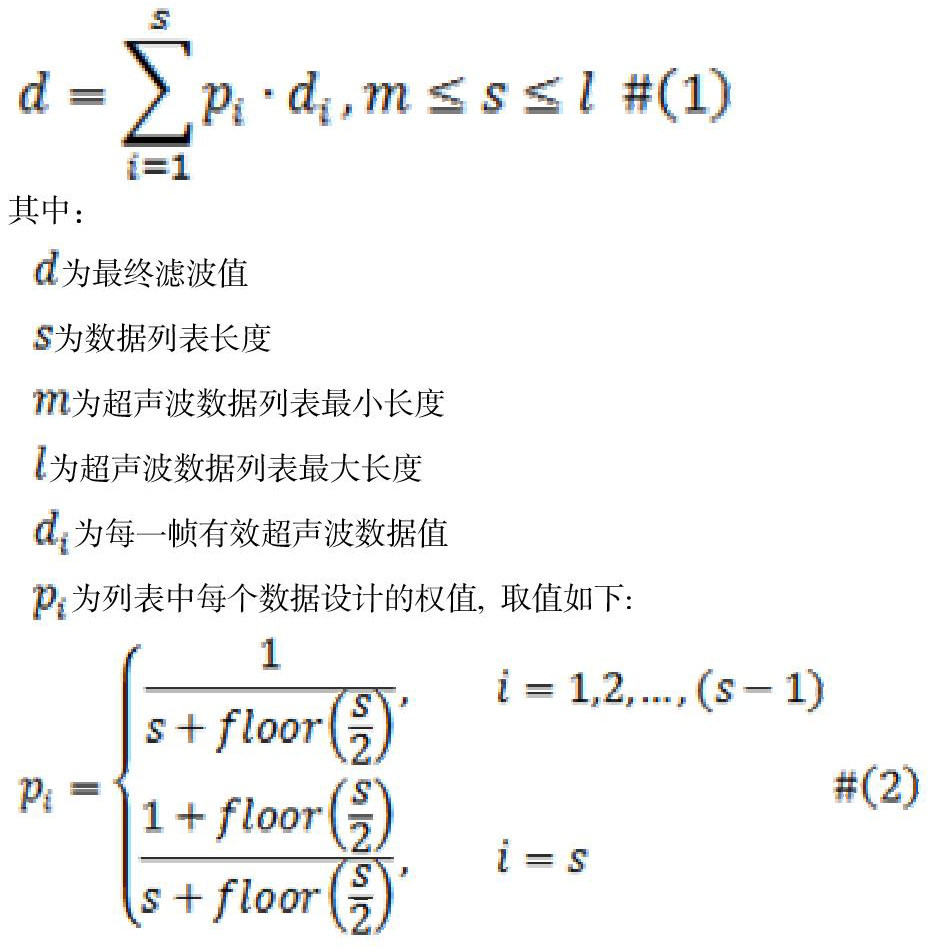
由于超声波数据跳变较为严重,因此单帧超声波数据的测距可信度不高,需要结合多帧超声波数据对当前测距进行校准和修正。在有效超声波数据列表的基础上,对其进行多权重滤波处理。
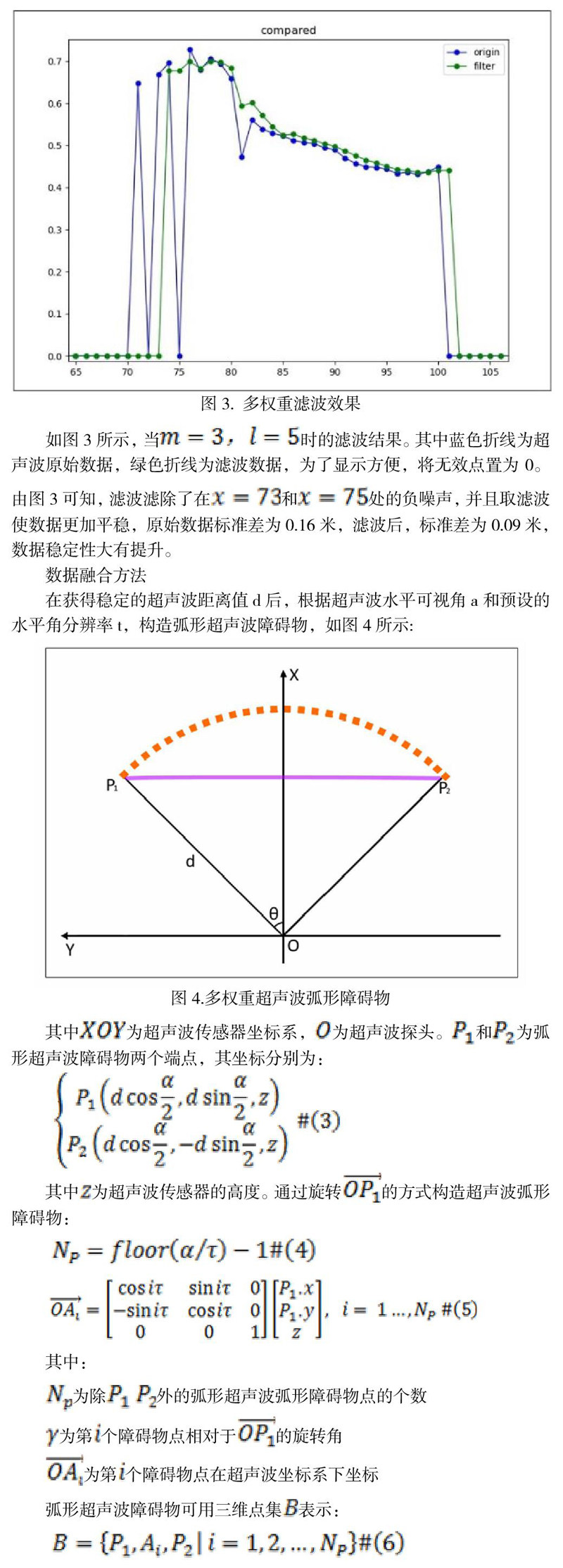
如图3所示,当时的滤波结果。其中蓝色折线为超声波原始数据,绿色折线为滤波数据,为了显示方便,将无效点置为0。由图3可知,滤波滤除了在和处的负噪声,并且取滤波使数据更加平稳,原始数据标准差为0.16米,滤波后,标准差为0.09米,数据稳定性大有提升。
数据融合方法
在获得稳定的超声波距离值d后,根据超声波水平可视角a和预设的水平角分辨率t,构造弧形超声波障碍物,如图4所示:
其中为超声波传感器坐标系,为超声波探头。和为弧形超声波障碍物两个端点,其坐标分别为:
其中为超声波传感器的高度。通过旋转的方式构造超声波弧形障碍物:
根据超声波外参旋转矩阵和平移矩阵可得到弧形超声波障碍物在车身坐标系下的坐标:
完成弧形超声波障碍物的构建。对于车身周围障碍物检测,使用超声波传感器辅助弥补激光雷达传感器盲区,点云数据为主,超声波数据为辅。因此若弧形超声波障碍物邻域内存在点云障碍物,则表明该障碍物激光雷达也可检测,此时无须超声波传感器辅助,直接使用点云障碍物作为最终障碍物检测结果。若弧形超声波障碍物邻域不存在点云障碍物,则表明激光雷达未检测到障碍物,而超声波检测到障碍物,因此将弧形超声波障碍物与点云障碍物融合作为最终障碍物检测结果如图5所示。
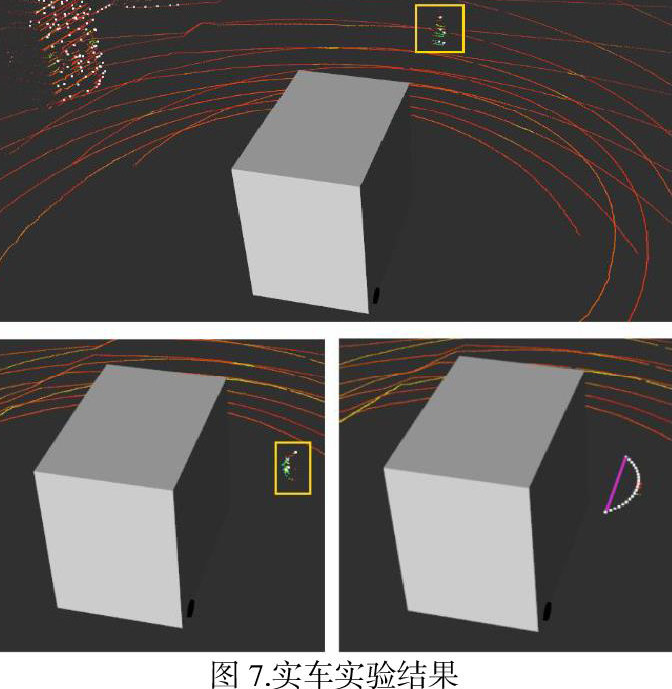
在图5中,白色矩形为车身,红黄色为激光雷达数据,紫色线段代表超声波探检测到障碍物,白色弧形代表弧形超声波障碍物与点云障碍物融合。在上图中,弧形超声波障碍物邻域内存在点云障碍物,因此点云障碍物为最终障碍物检测结果;在下图中,弧形超声波障碍物邻域中不存在点云障碍物,则将弧形超声波障碍物与点云障碍物融合作为最终的障碍物检测结果,实现超声波传感器对激光雷达盲区的消除。
实验结果
为了验证本文提出障碍物检测框架可行性,在半封闭科技园道路上进行实车测试。实验场景设计为清扫车日常工作环境,园区内路沿处经常设有路障。在清扫车沿边清扫作业,对路障进行避障动作时,验证所提出障碍物检测框架是否可以对激光雷达盲区内障碍物进行检测并达到补盲的效果,保证车辆安全。实车测试场景如图6所示。在启动自动清扫功能后,无人清扫车会按照设定路线前进,避过路障进行沿边清扫。
实车测试结果如图7所示,其中灰色部分为车辆,红色曲线为激光雷达数据。在清扫车距离路障一定距离时,两个激光雷达可观测到路障(黄框所示),并成功聚类,检测到障碍物。为了实现避障,车辆左转前行,在车辆慢慢靠近路障时,路障渐渐进入激光雷达盲区,激光雷达可扫描到的路障点云数量逐渐减少,但在此时还可以成功聚类。当清扫车进一步靠近路障时,路障点云更加稀疏,无法成功聚类,表明路障进入盲区。此时,超声波传感器发挥作用,检测到路障,路障周围不存在点云障碍物,则将超声波距离值转换为弧形障碍物,与点云数据融合形成最终的障碍物结果,实现障碍物检测,实车实验中,车辆成功避障。
结束语
本文提出的滤波算法剔除了超声波数据中的正负噪声,同时提高了超声波数据的稳定性,所设计框架弥补了激光雷达对车身周遭的盲区,融合激光雷达点云数据与超声波数据,实现对车身近距离障碍物检测。通过大量实车实验证明了所提出算法的稳定性,使得车身近距离激光点云盲区内障碍物可被检测,确保车辆安全。
参考文献:
[1]李洋.智能车辆障碍物检测技术综述[J].大众科技,2019,21(06):65-68.
[2]姚钺,任明武.基于PointNet++改进的点云特征提取与分类网络架构[J].计算机与数字工程,2021,49(10):2052-2056+2112.
[3]Yan, Yan et al. “SECOND: Sparsely Embedded Convolutional Detection.” Sensors (Basel, Switzerland) 18 (2018): n. pag.
[4]J. Zhou, X. Tan, Z. Shao and L. Ma, "FVNet: 3D Front-View Proposal Generation for Real-Time Object Detection from Point
Radu Bogdan Rusu and Steve Cousins. 3d is here: Point cloud library (pcl). In 2011 IEEE international conference on robotics and automation, pages 1–4. IEEE, 2011.
[5]Radu Bogdan Rusu and Steve Cousins. 3d is here: Point cloud library (pcl). In 2011 IEEE international conference on robotics and automation, pages 1–4. IEEE, 2011.
[6]S. Hwang, N. Kim, Y. Choi, S. Lee, and I. S. Kweon, “Fast multiple objects detection and tracking fusing color camera and 3D LiDAR for intelligent vehicles,” in the 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), August 2016, pp. 234–239.
[7]Xin Yu, Liang Huawei, Mei Tao, Huang Rulin, Du Mingbo, Wang Zhiling, Chen Jiajia, Zhao Pan, Dynamic Obstacle Detection and Representation Approach for Unmanned Vehicles Based on Laser Sensor. ROBOT. 2014,36(06):654-661.
[8]Z. Zhong, Z. Wang, L. Lin, H. Liang and F. Xu, "Robust Negative Obstacle Detection in Off-Road Environments Using Multiple LiDARs," 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, Singapore, 2020, pp. 700-705, doi: 10.1109/ICCAR49639.2020.9108058.
[9]袁春,曾凡,李昊,胡萌,徐哲.基于LabVIEW和单线激光雷达的障碍物识别算法研究[J].重庆理工大学学报(自然科学),2021,35(02):8-16.
作者简介:任家平(1997-),男,硕士研究生,主要研究方向:无人驾驶、障碍物检测、机器学习。

 京公网安备 11011302003690号
京公网安备 11011302003690号


