



- 收藏
- 加入书签

无人机倾斜摄影测量与实景三维技术在历史建筑虚拟重建中的探讨
 打开文本图片集
打开文本图片集
摘要:无人机倾斜摄影测量与实景三维技术结合起来,运用到历史建筑的虚拟重建中,可以很好的还原历史建筑的原貌,对历史建筑的保护和修复起到了很好辅助作用。本文立足目前前沿的测绘技术,探讨利用无人机倾斜摄影测量建立外部模型,实景三维技术建立内部模型,在通过坐标系的转换和统一,实现外部模型和内部模型的拼接,形成完成的三维立体模型。
关键词:倾斜摄影测量 实景三维 虚拟重建 纹理映射
1、前言
历史建筑,是经市、县人民政府确定公布的具有一定保护价值,能够反映历史风貌和地方特色,未公布为文物保护单位,也未登记为不可移动文物的建筑物、构筑物。它既可以充分体现当地的风土人情,又可以很好地反映人文历史、发展变迁。对历史建筑的保护,也是对文化的保护。随着科技的进步,我们可以利用先进的技术手段,对历史建筑进行虚拟重建,为历史建筑的修缮或重建提供详细的技术资料。无人机倾斜摄影测量是通过在无人机上搭载传感器,同时从垂直、前视、后视、左视、右视5个不同的角度采集影像;实景三维技术可以快速构建具有准确地物地理位置信息的真三维空间场景,直观地掌握历史建筑的细节特征[1]。
在历史建筑虚拟重建中,无人机倾斜摄影测量主要是获取建筑物的外表面的纹理信息,建立起建筑物的立体模型。实景三维技术可以有效地弥补无人机倾斜摄影测量不能涉及的有遮挡的区域及室内环境,将两项技术融合起来运用到历史建筑虚拟重建中,将可以大大提高作业效率,同时可以提供多种形式的数字化产品。
2、无人机倾斜摄影测量
2.1 无人机倾斜摄影测量概述
无人机倾斜摄影测量其实就是把倾斜摄影测量系统放在无人机平台上。相比有人机而言,无人机的飞行高度不高,一般为几十米到几百米不等,不会受到严格的航空管制,此外,无人机自带的飞行程序里面,一般对禁飞区都进行了设置,在禁飞区以外的飞行作业,无需进行特别的备案登记,给飞行作业带来了便利。同时,对无人机的操控手的要求有如取得小汽车驾驶证一样,经培训,取得民用无人机驾驶员合格证后,就可以操控无人机。
在测绘行业,目前使用较多的一般都是采用四旋翼或六旋翼的无人机平台搭载五镜头的相机,无人机自带的定位系统(北斗系统或GPS系统)和惯性导航系统,可以实时获得POS数据以及相关图像控制点的数据,因此,在后期数据时可以行POS数据推算出的侧视影像的POS数据,从而实现影像间的拼接,实现对DSM和DOM等模型的处理,获得多种形式的数字化产品。
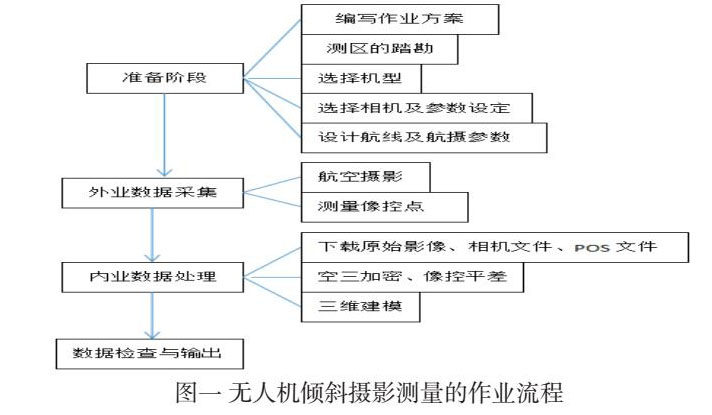
2.2 无人机倾斜摄影测量的作业流程
无人机倾斜摄影测量的作业流程与常规测量类似,主要包括准备阶段、外业数据采集、内业数据处理、数据检查与输出等步骤[2]。
为了严格保证像片质量,在飞行质量控制上,一定要注意像片重叠度航向不应低于65%,旁向不低于45%;航向弯曲度不宜大于5%;同一航向上相邻像片的航高高差不大于10米;行高与设计行高只差不大于30米。
3、实景三维
实景三维(3D Real Scene)。它是一种运用数码相机对现有场景进行多角度环视拍摄然后进行后期缝合并加载播放程序来完成的一种三维虚拟展示技术,是对人类生产、生活和生态空间进行真实、立体、时序化反映和表达的数字虚拟空间,是新型基础测绘标准化产品,是国家新型基础设施建设的重要组成部分,为经济社会发展和各部门信息化提供统一的空间基底。
按《实景三维中国建设技术大纲》(2021版)的技术要求,历史建筑在实景三维建设内容指标表中属于部件级,倾斜摄影三维模型的分辨率不低于0.03m[3]。
3.1 实景三维技术的数学基础
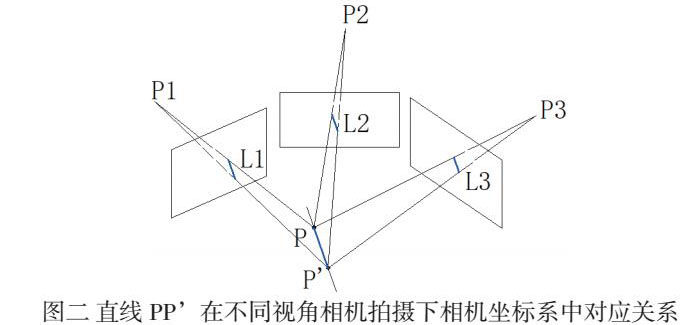
在影像获取上,实际是一个由现实世界的三维空间,通过获取设备(摄像机)成像,到图像的二维空间的过程。而实景三维实现的是由图像的二维空间恢复到虚拟的三维空间的过程,要实现的是二维到三维的空间转换。但是由于二维图像对应的三维空间映射,其值不具备唯一性,导致求解难度增大,因此需要运用多视图几何原理,优化计算场景点参数。图二反映空间一直线PP’在不同视角相机拍摄下相机坐标系中对应关系。
3.2 特征像素点的提取和匹配
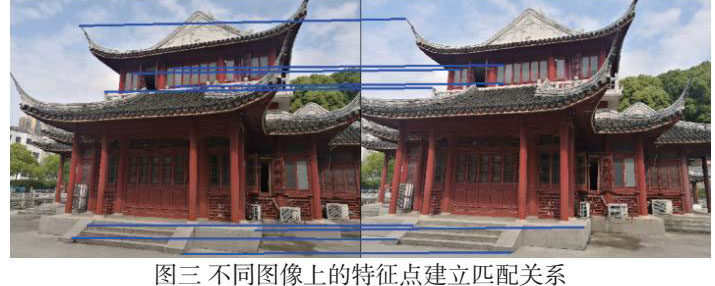
在图像采集时,同一特征像素点显示在不同帧的像片上,拍摄帧间隔越小,像片的重叠度高,通过获取每一拍摄时间点摄像机的内外参数,通过映射关系,就可得出特征像素点的位置值,类似于传统测绘上的空间后方交会。图三示意为不同图像上的特征点建立匹配关系。
每一张像片所对应的成像坐标系是独立的,在提取了图像中特征像素点和对应的配比信息后,就要计算这多张像片之间的多视图的空间关系,才能通过多张像片来通过计算机模拟得出空间三维点云,从而实现三维实景的效果。
3.3 摄像机内外参数的标定
摄像机的内参数(Intrinsic)由摄像机本身决定,只与摄像机本身有关。其参数有:参数矩阵和畸变系数;摄像机的外参数(Extrinsic)摄像机在世界坐标系中的位姿,由摄像机与世界坐标系的相对位姿关系决定。其参数有:旋转向量R和平移向量T。
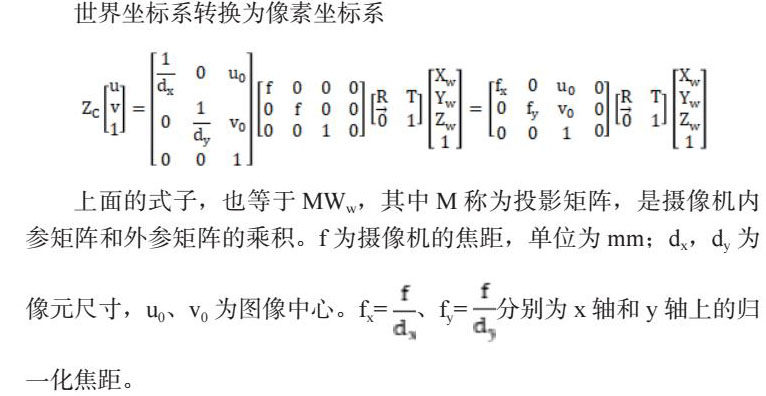
三维重建就是指从图像出发恢复出空间点三维坐标的过程,也是摄像机标定的目的。其过程为:世界坐标->相机坐标->图像坐标->像素坐标。整体的坐标转换如下[2]:
上面的式子,也等于MWw,其中M称为投影矩阵,是摄像机内参矩阵和外参矩阵的乘积。f为摄像机的焦距,单位为mm;dx,dy为像元尺寸,u0、v0为图像中心。fx=、fy=分别为x轴和y轴上的归一化焦距。
4、历史建筑的三维重建
通过倾斜摄影测量获取了建筑物的外部纹理信息,同时像素点也有了比较精确的匹配结果,结合摄像机标定的内外参数,就可以恢复出历史建筑物的外部三维场景信息。下面主要阐述一下建筑物内部场景的三维重建方法[4]。
由于历史建筑的内部结构复杂,通过不同的空间序列转换,各个区域都显示了自身在整体中的独立性格,因此本次三维重建采用被动视觉三维重建方法,使用摄像机采集三维场景得到其投影的二维图像,根据图像的纹理分布等信息恢复深度信息,进而实现三维重建。
4.1 内部结构的影像的获取
建筑物的内部构件主要包括楼梯、梁柱、地面、顶板、楼板及其他家具摆设等。
在采集这些内部构件前,要设计好摄像机的拍摄角度,充分考虑建筑内部构件的主次布局,尽量使得拍摄焦点位于所要拍摄构件的中心。同时,在不受到障碍物遮挡的情况下,尽量远离拍摄构件,这样可以有效的减小摄影机镜头的变形。对于内部空间大,需要进行多站拍摄时,应保持相邻摄站的像片有65%以上的重叠度。对于顶板的拍摄,要用摄像机基座或三脚架,保证摄像机主光轴的竖直向上。
4.2 基于像片的三维坐标提取
通过摄像机在不同角度对同一位置点的拍摄,在摄像机内外参数标定后,就可以通过空间坐标的转换,获取到位置点的像素坐标。像素坐标系与图像坐标系的关系如下:
4.3 纹理映射
历史建筑物由于历史的久远,其表面的纹理远比现代建筑物要复杂的多,需要更精细的三维模型才能更好地还原现实。
纹理映射是将二维纹理图像坐标映射到三维模型表面的一个过程,通过将高质量的纹理图映射到三维模型上,可以使三维模型看起来具有良好的真实感,同时也可以弥补三维模型的不足,三维模型缺少的细节,可以通过映射带有丰富细节的纹理图,使得模型更具有真实感。
纹理映射过程主要分为三个步骤:
(1)建立三维模型节点与纹理坐标的对应关系;
(2)顶点纹理坐标与屏幕像素纹理坐标的转换;
(3)提取、黏贴纹理;
5、模型的拼接
由于本次历史建筑虚拟重建的过程分为了两部分,外部模型的建立,是通过无人机倾斜摄影测量的方法获取的影像,从而建立三维模型。内部模型被动视觉三维重建方法,通过摄影机获取建筑的内部结构特征,利用图像出发恢复出空间点三维坐标建立模型。所以两个模型所采用的空间坐标系及比例因子就不一致。
需要利用空间坐标转换,把两个模型的坐标系统一到系统的坐标系下,同时要采用相同的比例,就可以对模型进行拼接了。
6、结语
历史建筑只是建筑中的极小一部分,运用无人机倾斜摄影测量和实景三维技术来构件虚拟的历史建筑,将可以很好的起到由点到面的作用,为实现实景三维的城市建设提供参考。随着智慧城市工程的逐步推进,模型的构建,必将逐步向真三维迈进,为城市管理、乡村规划提供便利。
参考文献:
[1]孙松梅, 黄天进, 孙颖. 城市高精度实景三维单体模型建设及应用[J]. 测绘通报, 2021, 0(1): 108-111.
[2]无人机倾斜摄影测量技术作者:赵国梁主编出版社:西安地图出版社出版日期:2019
[3]《实景三维中国建设技术大纲》(2021版)[S]
[4]郭楷文,刘恋,曹成蓉等l.基于无人机倾斜摄影测量技术的三维建模[J].科学家,2016(14):60-61.
第一作者:刘伟,男,高级工程师,1981年月出生大地测量学与测量工程专业硕士研究生,注册测绘师,主要从事测绘与GIS方面的应用与开发。

 京公网安备 11011302003690号
京公网安备 11011302003690号


