



- 收藏
- 加入书签

工业机器人故障诊断系统设计
 打开文本图片集
打开文本图片集
摘要:在工业机器人但故障诊断算法和复合故障诊断模型不断成熟的情况下,研究故障诊断系统设计和实现有着重要意义。通过系统功能模块、系统架构、故障诊断模块等几个方面实现工业机器人故障诊断系统,为故障诊断算法模型的验证奠定基础。
关键词:工业机器人;故障诊断;系统设计
1工业机器人故障诊断系统模块设计
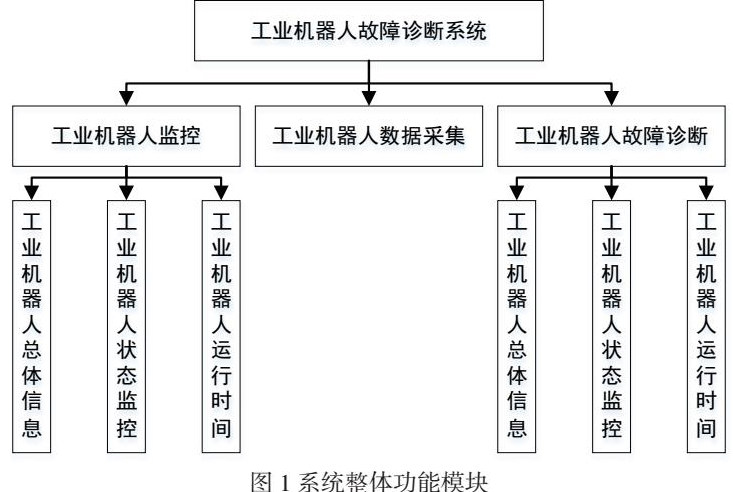
工业机器人故障诊断是建立在大量实时数据的基础之上,因此如何采集准确完整的实时运行数据至关重要。设计的故障诊断系统必须要能够及时获取工业机器人运行数据,通过诊断准确地发现机器人故障所在,为高效的维护维修奠定基础。结合工业机器人常规故障类别,设计下图1所示的工业机器人故障诊断系统功能模块。
第一个模块是工业机器人的监控模块,这里可以总览机器人的所有信息,包括有多少机器人,在线的机器人有多少,采集到的数据量和数据的种类,以及有无报警事件和报警日志详细信息等。通过这一模块可以实时监控工业机器人的相关数据,程序运行有无异常等故障信息。
第二个模块是工业机器人的数据采集模块,这里汇聚了工业机器人的各种运行数据,进入数据列表可以看到更加详细的信息,全面管理各种机器人并且动态配置好相应的数据,根据采集的频率对数据进行分类管理,为故障诊断奠定良好的数据基础。
第三个模块是故障诊断模块,通过标记工业机器人相应的故障数据,并且建立模型进行故障诊断训练,同时将诊断信息显示出来,引导用户操作和判断。与此同时,这里还需对算法模型进行及时更新。
2工业机器人故障诊断系统架构设计
明确了工业机器人故障诊断系统功能之后,接下来需要确保开发出来的系统具有较强的应用价值,维护方便的同时安全可靠。目前使用到的典型框架有Vue.js、TensorFlow、Spring MVC、Spring、Mybatis等,这里选择了操作界面友好性较强的Vue.js框架。
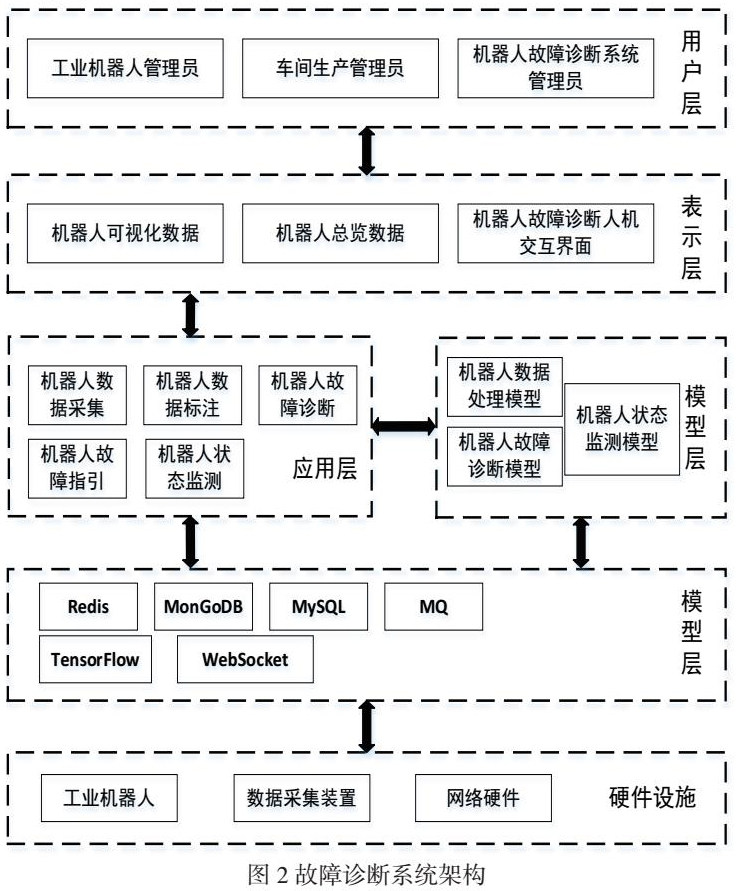
在系统架构方面选择B/S架构,包含了前端、后台以及数据库等三个部分,其中,前端网页开发通过HTML、CSS、JavaScript来实现,利用后台发布的API接口获取相应的数据,数据库则使用MySQL和MongoDB,中间件为MyBatis。浏览器和服务器之间的长连接则使用WebSocket技术,利用MQ通信框架采集工业机器人运行状态数据。整个工业机器人故障诊断系统的架构有以下几层:
第一层是用户层,这里主要对不同的用户角色进行定义,有现场的生产管理人员和设备维护保养人员以及故障系统管理工作人员。不同用户使用系统的功能权限不一样,生产设备管理工作人员主要查询使用故障诊断结果信息,在其引导之下开展维修工作,系统管理人员则是采集、训练以及维护工业机器人相关数据。
第二层是表示层,界面的易操作性与交互性对这一层而言至关重要,通过浏览器用户能够访问该系统,所有用户请求操作的信息都需要通过这一层来实现。常规的用户操作主要有工业机器人历史信息查看、运行实时数据、报警日志信息、程序运行状态和参数设置等多个方面。
第三层是应用层,系统功能主要通过这一层来体现,用户在浏览器上发出请求之后,这一层会选择相应的算法模型来处理工业机器人的运行数据和状态数据,并且向用户呈现出来。具体来说,应用层会发布用户所需的REST API以便于用户访问。无论是数据采集、状态监测,还是故障诊断等都需要通过这一层的模型算法来实现,并且将其反馈给表示层。
第四层是模型层,这里主要包括以下几个部分:其一是故障诊断所需的算法;其二是数据预处理;其三是状态监测对应的模型。这里使用TensorFlow来搭建故障诊断模型和故障诊断算法,将获取到的工业机器人实时数据发送到服务器中,判断机器人有无故障同时向表示层返回相应的结果,从而实现机器人运行状态的实时监控和预警。
第五层支撑层,主要是支撑相关数据和整个框架,持续采集和数据工业机器人的实时运行数据。考虑到实时处理数据的能力,这里使用到了Redis数据库来提高运行效率,通过分布式部署来增强系统的拓展性,系统前后两段的交互则通过HTTP协议来实现,双工通信则是基于WebSocket与MQ消息队列来实现。
除此之外,整个故障诊断系统还需要硬件设施作为支撑,除了机器人自带的工业交换机之外,还需要使用通信模块等来传输其实时运行的数据。整个结构如下图2所示:
3工业机器人故障诊断系统功能实现
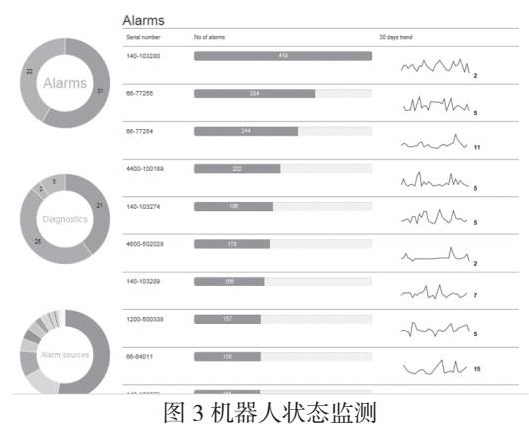
(1)状态监测
状态检测界面主要包含以下几部分内容:第一部分是针对某台机器人的详细资料信息,包括机器人的型号、所在车间、所在工位等;第二部分是机器人的运行信息,主要包括正在运行的程序、不同关节轴的实时数据、关键零部件的波形图等,如下图3所示。
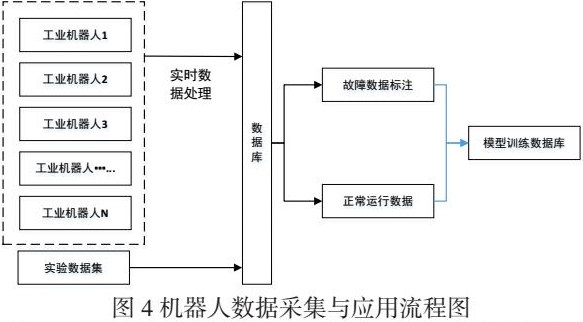
(2)故障数据标记和数据集
工业机器人在日常运行过程中会产生大量的数据信息,这些数据信息可以用于故障模型的训练,尤其是机器人发生故障时间点前后的数据,需要将这些数据存储到数据库之中。与此同时,需要把这些故障数据进行人工标记,从而得到相应的故障类型,以便形成更加有效的故障数据库。对于实时数据,一方面用于对现场机器人工作状态的实时监控,另一方面用于对机器人的在线诊断,下图4为数据采集和应用的主要流程。
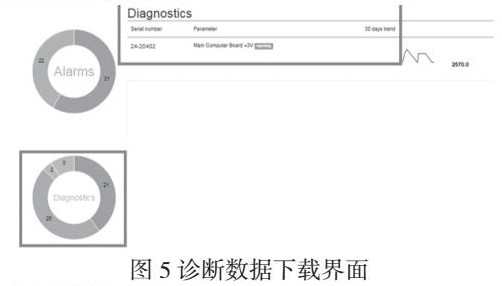
根据用户需求,可以选择所需的机器人编号查看故障诊断数据,并且可以进行数据下载。除此之外,也可以选择特定的机器人轴下载与轴相关的诊断数据。获得这些故障诊断的数据之后,可以将其作为故障训练模型新的训练数据。
(3)故障诊断模块
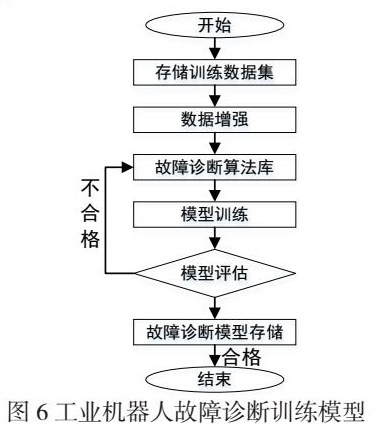
建立了工业机器人故障诊断模型之后,可以基于实时运行数据对工业机器人进行故障诊断。因此,模型训练首先得有历史数据,通过对历史数据训练不断优化模型,然后基于此模型对实时运行数据进行故障诊断,这是一个反复迭代的过程,图6反映了工业机器人故障诊断训练的整个流程。
机器人故障诊断模型训练主要分为以下几个步骤:
第一步是准备和存储模型训练的数据集,在获得了相应的数据集之后,由于初始数据集数量有限,需要对数据进行增强处理,然后才能够将其作为样本输入到模型之中。
第二步是利用算法平台,这里使用TensorFlow,然后编写好相应的算法文件,将第一步得到的样本输入到算法模型之后进行模型训练,之后通过测试集数据来对模型的精度进行验证。假设故障诊断模型满足需求,那么需要保存该模型为能够执行的文件;相反,如果故障诊断模型不满足需求,那么需要优化和改进模型的参数。在具体进行模型训练的过程中,可以根据实际需要来选择自动或者手动的方式,如果需要加入新的故障样本,此时可选择自动训练,在满足性能阈值的情况下,再将该模型存入到待用模型库之中。
第三步是模型的保存,在训练结束之后,需要将模型保存到服务器里面,以便于用户进行故障诊断的时候进行选择。
整个模型训练的过程中,数据的选择可以通过现有训练数据库实现,也可以通过在线新增训练数据实现,训练的模型也可以根据需要进行增加或者删除,用户设置相应的模型训练时间和训练精度,进行判断故障模型训练的应用是否满足要求。
4工业机器人故障诊断系统应用
在实现了工业机器人故障诊断系统功能之后,接下来在现场选择一台存在故障的工业机器人进行应用,从而验证故障在诊断模型的有效性。这里选择一台1轴和2轴存在故障的工业机器人,将其作为待检测的机器人,在已经建立好的故障诊断模型中进行选择,然后开始进行故障诊断,诊断完成之后会系统会输出相应的故障诊断结果,进入故障分析界面可以看到机器人六个关节轴的故障以及可能对应的故障零部件,验证诊断结果和预期是否相符合。
与此同时,在诊断和发现机器人存在故障的情况下,可以利用该界面及时通知维修人员,也可以查看系统给出的维修建议,这类建议主要来自于专家系统。关于故障诊断的频率,用户可以结合自身实际情况进行设置,减少人工干预,提高工业机器人的管理效率。关于工业机器人运行状态实时数据画面如下图6所示:
5总结
工业机器人是制造业皇冠顶端上的一颗“明珠”,也是传统制造业向智能制造转型升级过程中必不可少的硬件设备,随着工业机器人装机量的不断增加,对工业机器人的后市场也提出了巨大的挑战。目前绝大部分中小企业还是沿用的故障维修方式,也就是在机器人发生了故障之后才进行维修,这对企业生产线的稳定生产造成了很大的影响。如果仅仅依靠人为定时巡检会带来很多问题,一方面会好用大量的人力资源,成本较高,另一方面,依赖于人工经验来维护保养机器人效率不高。
随着人工智能技术、大数据技术、信息技术的进一步发展,数据分析水平也在不断提高,工业机器人的远程监控和故障诊断将迎来新的机遇,这也是增强工业智能化程度的必由之路。工业机器人的故障诊断也逐渐由单一故障诊断逐步向复合故障诊断方向发展,建立在数据增强算法的基础上,数据样本少、数据样本类别平衡性差、模型训练难等问题也将得到更好的解决,工业机器人故障诊断模型的精度也将得到不断的改善。
参考文献:
[1]许向南,闫利文,谢煜坚.基于移动终端的工业机器人远程监测与故障诊断系统设计[J].机床与液压,2021,49(23):73-76.
[2]刘海龙,李移伦,吴海波.工业机器人伺服驱动系统故障诊断研究[J].造纸装备及材料,2021,50(08):18-19.
[3]洪辉武. 工业机器人远程监控与诊断系统的研究与设计[D].江南大学,2021.DOI:10.27169/d.cnki.gwqgu.2021.000819.
[4]徐江陵.工业机器人云平台在故障诊断系统的应用[J].现代企业,2021(05):88-89.
[5]黄克.浅谈工业机器人柔性系统的故障诊断[J].电子世界,2021(08):198-199.DOI:10.19353/j.cnki.dzsj.2021.08.086.
[6]陈乐瑞,曹建福,王晓琪.工业机器人驱动系统非线性频谱故障诊断方法[J].西安交通大学学报,2019,53(04):93-99.
[7]张跃东,齐昕,童一飞.基于专家系统的焊接机器人故障诊断[J].机床与液压,2019,47(01):173-178.
[8]方启程,周俊,戴文静,李金波.基于Petri网的柔性制造系统中工业机器人故障诊断[J].上海工程技术大学学报,2015,29(03):203-208.

 京公网安备 11011302003690号
京公网安备 11011302003690号


