



- 收藏
- 加入书签

基于数字孪生技术的数控机床自动上下料产线仿真设计
 打开文本图片集
打开文本图片集

摘要:零件机床上下料产线,在现有工艺中采用人工上下料的方式,存在着生产效率低、人工成本高以及物料处理过程中的错误率较高等问题。利用数字孪生构建一个与实际产线高度相似的机床自动上下料仿真工作站虚拟模型。零件采用45号钢,针对钢的特性,设计机床自动上下料总体方案,再设计机床自动上下料装置和机床自动上下料产线工作流程。通过对45号钢金属零件机床上下料产线的仿真设计,验证自动上下料技术的可行性,为企业实现自动化生产提供技术支持。
关键词:45号钢金属零件;机床自动上下料产线;仿真设计
引言
机床上下料装置是自动或半自动机械装置,是产线的其中一部分,它将待加工工件送装到机床上的加工位置,加工完成后将已加工工件从加工位置取下。自动机床加设上下料装置后,可使加工循环连续自动进行,成为机床自动上下料[1]。工业机器人在一定程度上大幅缩减产品的生产周期,能够很好地应对客户日益多样化的要求,在先进制造业中起到重要作用。将工业机器人应用于机床,必定能够很好地简化机床的操作,提高安全性能,将工件的上下料及自动加工紧密连接,可以大大提高工作效率[2]。
利用RobotStudio软件搭建机床自动上下料仿真工作站模型,通过该模型,模拟不同的上下料策略、设备运行参数和生产场景,以评估其对生产效率、设备利用率和产品质量的影响。首先,精确地建模数控机床及相关上下料设备的几何形状、运动特性和工作原理,确保虚拟模型与实际设备的高度一致性。其次,实时采集实际产线的运行数据,如设备状态、加工进度、故障信息等,并同步到数字孪生模型中,使虚拟模型能够真实反映产线的实时状态。
本设计根据45号钢的性能特点选择机床、机器人和夹具,使用Solidworks软件绘制45号钢金属零件及托盘的3D图,导入RobotStudio软件搭建机床自动上下料仿真工作站,模拟机器人自动上下料的工作流程,优化生产流程,提高生产效率和质量,降低成本。
1、机床上下料产线仿真设计总体方案
1.1 45号钢金属零件
机床加工零件为45号钢,如图1所示,45#是钢的牌号是一种优质碳素结构钢,对应日标S45C,美标:1045,德标C45。45号钢的含碳量在0.42%到0.50%之间,其特征是相比普通A3钢,具有更高的强度,抗变形能力。作为轴类零件的毛坯和材料,轴的长径比小于5的称为短轴,大于20的称为细长轴,大多数轴介于两者之间。
1.2机床自动上下料产线的方案设计
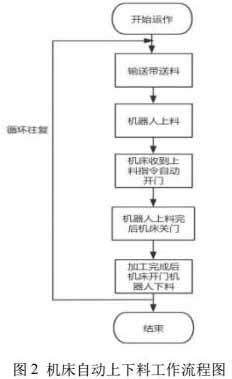
如图2所示,工人在产线旁进行物料的装配,装配完成后将托盘放置输送链上,输送链运送托盘及物料到达输送链末端(即取料处),输送链末端的传感器感应到物料,发送出物料到达的信号给机器人,同时输送链停止运输。机器人收到信号后,在导轨上从初始工位运动至取料工位,移动机器人手爪抓取零件,抓取第一个零件后,抓取第二个零件。待两个零件抓取完成后,机器人移动上料点时,机床门自动开门。当机器人将待加工零件上料到机床后,机器人离开机床,机床监测到机器人已经离开后,关闭机床门,根据预设的逻辑判断是否可以启动机床。如果机床的条件满足,机床开始自动运行,执行预定的加工操作。在机床完成加工操作后,停止加工[3]。
2、机床自动上下料模块设计
根据上下料的工作性质,机器人的工作范围,负载能力,机器人选用的是IRB 2600-20/1.65。机器人在进行上下料工作时,为了使机器人更加灵活,工作范围更广,可以将机器人安装在导轨上。根据机器人的行程、精度要求、导轨的负载能力、刚度和稳定性以及导轨安装和集成。选用IRBT 2005导轨搭配IRB 2600机器人来实现上下料工作。对45号钢金属零件进行加工可以选择CAK6180机床。CAK6180机床采用数控技术,配备精密的伺服系统和高精度的导轨,能够实现高精度的加工操作。CAK6180机床采用先进的数控系统,具有编程灵活、操作简便的特点。操作人员只需进行简单的编程设置,机床就能自动完成加工过程,大大提高了生产效率和加工精度。供料卸料系统是自动结合手动来进行供料卸料。45号钢金属零件物料由物料管理员运送到车间后装配到供料托盘上由输送链运送机器人取料处,当输送链末端传感器感应到由物料托盘的存在便会停止运行。控制柜选用IRC5 Single Cabinet。定位传感器可以用于确定工件的位置和姿态,从而实现准确的定位和测量。机床的安全保护装置运用传感器可以用于监测和保护机床自动上下料系统的安全,输送链的末端装置有传感器,可以检测到物料的运输情况。介绍了机床自动上下料装置的组建,供料卸料系统以及传感器与安全装置。
3、机床自动上下料产线设计
RobotStudio软件搭建机床自动上下料仿真工作站,以下主要为搭建工作站的具体工作内容:
3.1 搭建工作站
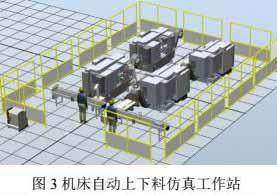
本设计工作站一共配置输送链两条,工人两名,分别为工作站管理员一名,物料管理员一名,机床四台,机器人一台,控制柜一台,导轨一台采用两条,如图3所示。
4.2创建smart组件
在RobotStudio中,Smart组件是指SmartComponent。SmartComponent是一种可重用的、自包含的机器人程序模块,可以在不同的工作站上使用,是在RobotStudio中实现动画效果的高效工具[4]。
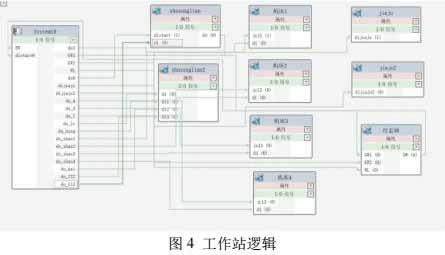
机床上下料功能模块设计,主要夹具、机床、导轨、行走轴设置机械装置、供料卸料系统输送链、信号配置等SMART组件设计。例如:信号配置,用户可以定义和配置与SMART组件相关的输入和输出信号,以实现对机器人系统的安全监控和控制。如图4,用户可以将不同的信号与SMART组件中的安全功能进行关联,从而实现机器人系统的灵活安全控制。具体来说,通过信号配置,用户可以定义输入信号,并将其与SMART组件中的功能进行绑定。一旦触发,SMART组件可以立即响应,机器人做出相应动作。
4.3 软件设计
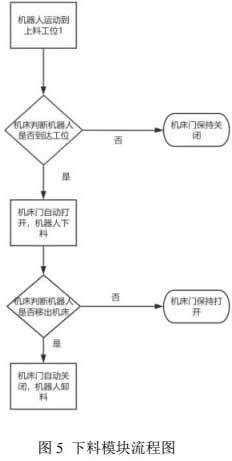
仿真工作站开始运作时,系统先进行初始化,输送链开始运送托盘至取料处,机器人前往取料处取料,若无物料,则会等待输送链运送物料至取料处再进行上料;机床门感应到机器人上料自动开门,机器人上料完成后移出机床,机床门自动关闭开始加工零件,待加工完成后自动打开机床门,机器人下料至托盘,下料托盘装满后自动运输,若未装满则保持不动,待装满自动运送。部分模块流程图如图5所示。
4、机床自动上下料仿真调试
打开RobotStudio软件,导入已编写好的程序。设置仿真场景,包括虚拟传感器、执行器和机床等。配置传感器信号与虚拟信号的映射关系,设置好仿真场景后,启动RobotStudio的仿真功能,观察机器人是否能够按照设定的程序工作。
启动工作站仿真。托盘与物料作为一个组出现在输送链上并向输送链末端运输,触碰到输送链末端时停止输送。如图6(a)机器人移动到取料工位,调整姿态,控制绿色夹爪与黄色夹爪依次夹取物料,传感器感应到物料后,机器人便会实现抓取物料功能。机器人夹取零件后,调整姿态,移动到工位1,机床1,机床4感应到机器人的靠近,实现自动开门功能,机器人将零件上料至机床1。机器人上料完成离开机床后,机床门上的传感器感应到机器人上料完成离开机床自动关门。零件加工完成后,机器人移动到工位处进行下料,机床门自动打开,机器人完成下料退出机床后,机床自动关门。机器人将已加工零件卸料到卸料托盘。图6(b)中卸料托盘装满后会自动运输到输送链末端,并自动生成一个新的托盘用于装已加工零件,另一边供料托盘中物料全部供完后,托盘会自动消失并生成一个新的装满零件的托盘,在输送链上运输至供料处。
5、结论
本文主要利用数字孪生技术对机床自动上下料产线进行仿真设计,旨在提高生产效率、降低人力成本。通过深入分析数控机床的上下料,设计了机床自动上下料的总体方案,并使用RobotStudio软件搭建机床自动上下料仿真工作站,设计机床自动上下料产线,其中包括机器人上下料,供料卸料系统,机床自动开关门以及传感器,最后通过仿真验证其可行性,也为实际引入自动化设备提供了技术支撑,降低成本。同时,基于数字孪生模型还可以进行各种分析和优化,通过分析物料流动和设备协同工作情况,优化上下料路径和节拍,减少等待时间和物流拥堵;对设备的维护计划进行模拟和调整,以提高设备可靠性和可用性。还可以利用仿真设计对新的生产工艺或设备布局进行预验证,降低实际实施过程中的风险和成本。
参考文献
[1] 谢国强,张宝进,任雷.基于PLC的工业机器人自动上下料控制系统设计[J].电工技术,2021,(14):20-22.
[2]张红丽.数控机床自动上下料装备技术发展现状及分析[J].中国高新科技,2022(06):43-44.
[3]梁赟,谭小蔓.机床上下料自动化系统的电气设计[J].机电工程技术,2019,48(06):42-45.
[4]姜海.基于多自由度机器人仿真工作站的设计与实现[J].电子制作,2023,31(22):89-92.
基金项目:2023年广东科技学院大学生创新创业训练计划项目:基于数字孪生技术的运动控制系统综合实验室应用研究(GK2023012)
*通信作者:王华荣

 京公网安备 11011302003690号
京公网安备 11011302003690号


